自动顶-夹式蔬菜穴盘苗取苗装置设计与试验
2016-03-23王东洋姬江涛贺智涛
王东洋,金 鑫,姬江涛,贺智涛,颜 华
(1.河南科技大学 农业工程学院,河南 洛阳 471003;2.现代农装科技股份有限公司,北京 100083)
自动顶-夹式蔬菜穴盘苗取苗装置设计与试验
王东洋1,金鑫1,姬江涛1,贺智涛1,颜华2
(1.河南科技大学 农业工程学院,河南 洛阳471003;2.现代农装科技股份有限公司,北京 100083)
摘要:为了提高蔬菜穴盘苗移栽机的作业效率,设计了一种钵苗体底部先顶出后夹取式自动取苗装置。根据该装置工作特点及取苗农艺要求,对其关键部件进行设计分析,并建立了运动学模型。以理论模型为基础,采用Visual Studio 软件开发了取苗装置动作时序分析程序,完成了参数优化。室内试验表明:针对3种不同基质含水率的番茄穴盘苗,该装置能够实现140株/min的取苗速度,成功率超过95%;基质含水率在32.79%时,取苗成功率较高。
关键词:蔬菜;穴盘苗;自动顶夹式;取苗装置
0引言
穴盘自动取苗技术是蔬菜穴盘苗全自动移栽技术中的核心部分,取苗质量的好坏直接影响到钵苗移栽的成功率[1-5]。国外自动取苗技术发展早,技术较为成熟,得到了广泛的推广;但其取苗机构多采用电控装置,辅助机构多,机具体积庞大,动力匹配要求高,使用成本高[6]。国内对自动取苗技术研究起步较晚,近几年,国内学者对自动取苗机构做了大量研究;但多偏重于插-取式取苗机构的研究,设计出的取苗机构取苗速度和成功率较低[7-15]。针对以上问题,本文提出一种从钵苗底部先顶出后夹取式全自动穴盘苗取苗装置,对关键部件进行了分析和优化,并对样机进行了性能试验。
1总体结构和工作原理
全自动穴盘苗移栽装置由苗盘输送机构、纵移机构、顶苗机构、机架、横移机构、导苗机构、取苗机构和压苗板8部分组成,如图1所示。
机构工作原理图如图2所示。机器工作时,移栽机地轮为各装置提供动力,人工将穴盘苗放在输送结构上;穴盘苗在纵向输送机构的作用下做步进运动,运动到顶杆位置时,苗盘停止,顶杆机构将钵苗顶出一定距离;顶杆将苗顶出后,取苗装置夹住基质苗,然后摆动到导苗管上方,对准导苗管后,基质苗落入导苗管中,栽植器完成栽植。

1.苗盘输送机构 2.纵移机构 3.顶苗机构 4.机架

1.苗盘输送动作 2.顶出动作 3.苗爪翻转动作 4.放苗动作
2关键部件的设计与参数的确定
输送、取苗和顶苗是取苗装置的核心部件,在作业的过程中,三者的运动参数和运动关系影响取苗的成功率。
2.1 横移机构的设计
横移机构的主要作用是将钵苗从穴盘中顶出。由于钵苗间隙小,顶杆需要穿过穴盘底部的穴孔将苗顶出,所以使用单排两次顶出,即1次顶出1排苗的1/2,然后苗盘横移1次,在顶出其余的基质苗。因此,横移动作要求在顶苗时苗盘静止不动,在顶苗间隙完成横移动作。其工作原理简图如图3所示。
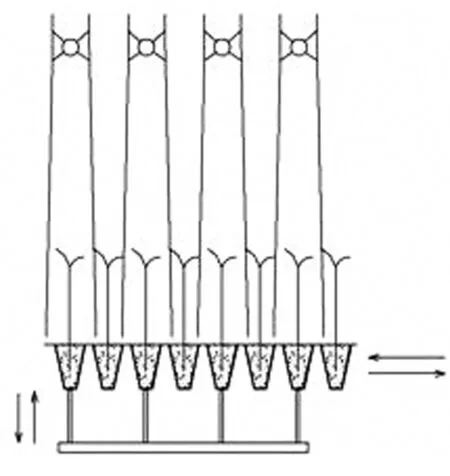
图 3 顶苗机构简图
2.2 纵移机构的设计
穴盘纵向步进动作需要满足如下要求:顶苗时,苗盘静止不动,顶完1排,苗盘纵向移动1个穴距的距离,并保持动作稳定、定位准确;其动作为间歇步进动作。
2.3 顶苗机构
机构在完成顶苗动作时,要求用成排的顶杆将基质苗从穴盘中顶出,在顶杆没有进入穴盘时,有一定时间是进行穴盘的步进纵向输送,即苗盘的纵向步进输送动作与顶苗动作不能产生干涉。顶苗装置机构简图如图4所示。

图4 顶苗机构结构图
图4中,A、B点的位移方程为
(1)
(2)
式中a—曲柄OA的长度(mm);
b—连杆AB的长度(mm)。
α1=ω1t
asinα1=bsinα2+e
(3)
式中ω1—曲柄的角速度(rad/s);
e—偏心距(mm)。
B点质心运动方程为
(4)
B点的速度方程为
(5)
B点的加速度方程为
(6)
曲柄滑块顶苗机构作为一种单移动副的四杆机构,虽然结构简单,但由于运动副之间的间隙和构件制造的误差等因素,装配后会使从动件产生一定的输出误差;而顶苗机构需要顶杆从苗盘底部的排水孔穿出,排水孔的直径略大于顶杆直径,顶杆如果和孔壁发生干涉将会影响整机的正常工作,所以需要曲柄滑块顶苗机构到达一定的精度。通过概率计算构件制造尺度的随机变化,保证顶苗机构的运动精度在排水孔允许的范围之内。利用数学软件MatLab进行编制计算,得出顶苗机构曲柄长度a、b和允许最大偏差Δa、Δb。
2.4 夹取苗机构
基质苗从苗盘中顶出后,要经由夹取苗机构将基质苗夹入到导苗装置中,夹取苗机构要完成苗爪的翻转和开合两个动作,如图5所示。苗爪在夹持基质苗时应保证苗爪在开启时不能对钵苗照成伤害,待钵苗翻转时,应保持夹紧稳定,翻转冲击小,不至将苗甩脱。其机构运动简图如图5所示。

1.顶杆 2.苗盘 3.基质苗 4.苗爪 5.苗爪开合凸轮 6.回位弹簧
2.5 时序分析
移栽机工作时,动力由地轮提供,传动到各个机构,一个动力源可以保持送苗、顶苗、取苗等机构的同步动作。为了保证在取苗过程中,顶杆与穴盘之间不会产生运动干涉,必须满足下列条件
(7)
设xBmax为xB的最大值,m为顶苗点位置,那么顶苗动作时的顶苗位移为xBmax-xB,建立方程为
(8)
其中,0≤α≤2π。根据曲柄滑块的轨迹方程可知方程将会有两个解α1和α2,那么2π-|α2-α1|为顶苗机构到达顶苗点之后所对应的相位角。
为使顶苗机构与苗盘输送机构不产生干涉,需要满足的条件为
(9)
其中,β1为苗盘纵移的运动相位角;β2为苗盘横移机构远休或近休相位角。
根据顶苗优化结果和时序条件,得到方程组为
(10)
根据所建立的方程,应用Microsoft Visual Studio编写可视化蔬菜穴盘苗自动取苗装置时序分析程序,通过人机对话,改变各个机构的参数;图形区将会实时生成顶苗、横移、纵移、苗爪翻转和苗爪开合的位移曲线图,进行时序分析,如图6所示。
通过对程序中的可视化图形进行分析,得出各机构的参数,苗盘横移机构的运动周期最长,以其开始转动的初始相位角为原点,确定各机构的最佳参数。最佳参数为:横移机构的位移为h1=36.5mm,纵移机构的初始相位角φz=185°,顶苗机构的初始相位角φd=108°,曲柄长度a=78mm,连杆长度b=112mm,偏心距e=20mm,苗爪翻转机构的初始相位角φf=15°,苗爪开合机构的初始相位角φk=135°。

图 6 时序分析界面图
3试验
3.1 试验材料和设备
试验设备:蔬菜穴盘苗自动取苗装置样机(动力源为变频调速电机,可通过变频器实现无极调速,速度变化范围6~240rad/min),i2000型电子天平,台秤,DZG-6020型真空烘箱,封口塑料袋,游标卡尺(量程200mm,精度0.02mm),秒表。
试验对象为番茄穴盘苗,品种为以色列1918,苗龄50天(因为育苗日期1月,北方气温较低,育苗期较长)。育苗基质主要成分为泥炭70%、珍珠岩15%、蛭石15%。育苗质量较好,出苗率达到100%,且基质块紧实,盘根情况较好,达到了试验用苗要求。
3.2 试验指标和方法
选取取苗成功率为试验指标进行样机性能试验,如图7所示。

图 7 穴盘苗自动取苗装置性能试验
具体试验方法:取9盘苗(出苗率均为100%),在试验前1天晚间将所有基质苗浇水至饱和(从排水孔底部渗水);试验当天每隔4h做一组含水率的试验,每个含水率进行3组试验;变频器的频率分别为2.5、3.5、4.5Hz,对应的取苗速度约为80株、110、140株/min(取苗速度大于140株/min时,机构抖动比较厉害)。
取苗成功率的计算公式为
式中W—取苗成功个数;
W0—穴盘中基质苗总个数;
W1—顶苗阶段未顶出的苗数;
W2—夹取苗阶段未成功夹取到位的苗数。
定义在取苗结束后基质块仍然残留在苗盘中的基质苗个数为顶苗阶段未顶出的苗W1;机械手未能夹取到或者在落苗动作前基质苗就从苗爪中脱落的基质苗数为夹取苗阶段未成功夹取到位的苗数W2。试验结果如表1所示。

表 1 取苗成功率统计结果
3.3 试验结果与分析
由表1可知:针对3种不同含水率的基质苗试验,该取苗机构最高取苗速度可达140株/min,在80~140株/min的取苗速度范围内,取苗成功率均超过95%。
从图8中可以看出:基质含水率在32.79%时,取苗成功率最高;在80~140株/min的取苗速度范围内,取苗成功率随速度的增加而降低;取苗速度为140株/min时,取苗成功率最低,最低为95.31%。
这是由于顶苗机构是从苗穴底部把苗钵顶出:含水率较低时,苗钵基质体内基质之间的黏结力较小,在顶出时,受顶出力和夹取力的作用,苗钵容易松散,不能正常夹取钵苗,取苗成功率低;含水率较高时,基质变形量大、黏性大,在顶出时,由于变形和基质与穴盘壁的黏结力的作用使钵苗不能完全顶出穴盘,顶出结束后,一部分钵体仍留在穴盘中,取苗机构在取苗后,基质块底部在随取苗机械手翻转时与穴盘剐蹭,使基质损失严重,导致取苗成功率低。速度较高时,取苗装置抖动比较严重,顶苗机构顶杆与穴盘底部孔的配合间隙较小,装置抖动严重时,会出现顶杆卡滞,顶苗成功率低;并且机架抖动严重时,取苗机械手在取苗时会抖动严重,取苗位置误差变大,导致取苗成功率低。
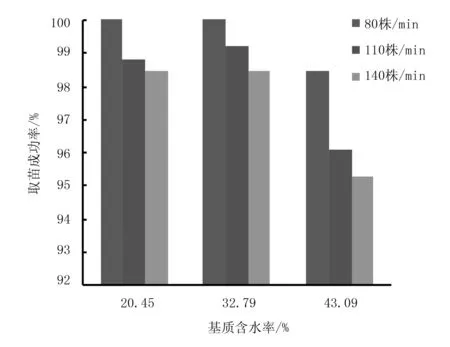
图 8 含水率对取苗速度规律影响图
4结论
1)设计了一种从钵苗体底部先顶出后夹取顶-夹式自动取苗装置,由输送机构、纵移机构、横移机构、顶出机构和取苗机构组成。样机性能试验表明:该装置能达到高速、高取苗成功率的取苗效果。
2)选取含水率分别为20.45%、32.79%和43.09%的番茄钵苗基质进行样机性能试验,结果表明:对于3种不同含水率的钵苗基质,取苗装置最高取苗速度可达140株/min,在取苗速度范围内,取苗成功率均超过95%;分析了基质含水率对取苗成功率的影响,钵苗基质含水率在32.79%时,取苗成功率较高。
参考文献:
[1]程前.穴盘倒置式取苗分苗装置的研究 [D].石河子:石河子大学, 2012.
[2]胡敏娟,吴崇友,金诚谦,等.穴盘苗取苗机构的设计与试验研究[J].农机化研究, 2014,36 (12):144-146,150.
[3]胡敏娟,吴崇友, 袁文胜,等.穴盘苗自动取苗机构的研究分析[J]. 农机化研究, 2012, 34(7):78-83.
[4]田昆鹏,毛罕平, 胡建平,等.自动移栽机门形取苗装置设计与试验研究 [J].农机化研究, 2014, 36(2):168-172.
[5]吴福华,毛罕平,胡建平,等.穴盘苗自动移栽机设计及实验[J].农机化研究,2013,35 (4):156-159,167.
[6]张丽华,邱立春,田素博,等.穴盘苗自动移栽机的研究进展[J].农业科技与装备,2009(5):28-31.
[7]祝广辉.蔬菜钵苗旋转式取苗机构的参数优化与试验[D].杭州:浙江理工大学, 2015.
[8]丁文芹,毛罕平,胡建平,等.穴盘苗自动移栽机的结构设计及运动仿真分析[J].农机化研究, 2011, 33(10):75-77,137.
[9]顾文俊,曹卫彬,李卫敏,等.穴盘苗顶杆式取苗机构的自动化控制系统设计[J].农机化研究, 2013,35(12):108-111.
[10]韩绿化.蔬菜穴盘苗钵体力学分析与移栽机器人设计研究[D].镇江:江苏大学, 2014.
[11]金鑫,李树君, 杨学军,等.蔬菜钵苗取苗机构运动分析与参数优化[J].农机化研究, 2014, 36(7):13-17.
[12]李华, 曹卫彬, 顾文俊,等.夹持式取苗机构自动控制系统设计[J].农机化研究, 2014, 36(7):107-109,113.
[13]缪小花.穴盘苗移栽机新型取苗机构的设计与参数优化[D].镇江:江苏大学, 2014.
[14]叶秉良.蔬菜钵苗旋转式取苗机构的参数优化与试验研究[D].杭州:浙江理工大学, 2013.
[15]叶秉良, 俞高红, 陈志威,等.偏心齿轮-非圆齿轮行星系取苗机构的运动学建模与参数优化 [J].农业工程学报, 2011, 27(12):7-12.
Design and Experiment of Fully Automatic Ejection and Picking-up Seedlings Mechanism of Transplanter
Wang Dongyang1, Jin Xin1, Ji Jiangtao1, He Zhitao1, Yan Hua2
(1.College of Agricultural Engineering,Henan University of Science and Technology,Luoyang 471003, China;2.Modern Agricultural Science and Technology Co. LTD.,Beijing 100083, China)
Abstract:In order to improve the efficiency of hole tray seedling transplanter, an ejection-first from the bottom of the matrix and picking-up later mechanism was designed.The key components were analyzed and designed and the kinematic models of the key components were built based on operating feature and agriculture requests. According to the kinematic models and working sequence of the mechanism, a computer-aided operation process analysis system was developed by using the Visual Studio software and the key parameters were optimization designed by this system. Experiment was done on with three different moisture content seedlings. The results showed that the picking-up velocity of this mechanism can reach 140 plants per minute with three different moisture content matrix of tomato seedling,and the success rates of picking-up were above 95%, success rate of picking-up was relatively high when the moisture content was 32.79%.
Key words:vegetables; hole tray seeding; automatic ejection; picking-up mechanism
中图分类号:S223.92
文献标识码:A
文章编号:1003-188X(2016)10-0064-05
作者简介:王东洋(1990-),男,河南周口人,硕士,(E-mail) hkd_wdy@163.com。通讯作者:金鑫(1986-),男,河南信阳人,讲师,博士,(E-mail) jx.771@163.com。
基金项目:国家自然科学基金项目(51505130);河南省科技攻关项目(122102210564);河南教育厅科技攻关项目(13A460234)
收稿日期:2015-09-19
