水田激光耙浆平地机振动特性研究
2016-03-23孙启新陈书法芦新春
孙启新,陈书法,杨 进,芦新春
(淮海工学院 机械工程学院,江苏 连云港 222005)
水田激光耙浆平地机振动特性研究
孙启新,陈书法,杨进,芦新春
(淮海工学院 机械工程学院,江苏 连云港222005)
摘要:激光耙浆平地机代表了水田耕整机的智能化和精准化发展方向,如何提高其作业精度是当前研究的重点,而激光信号接收精度是保证水田耕整机作业精度的关键因素之一。为此,从整机角度出发,分析了其振动特性对激光信号接收精度的影响。耙浆平地机是自由振动和受迫振动的耦合,振动给激光接收器和支撑杆带来较大的空间摆动,造成接收器偏离激光信号。根据动力学方程和四参数法建立双层隔振模型,采用模糊优化方法对隔振系统进行优化求解,在此基础上完成隔振系统结构设计。试验结果表明:该隔振系统可有效地降低整机振动对支撑杆的激励,支撑杆摆角从25°减小到2°左右,激光接收器横向振动振幅控制在6cm以下,隔振系统传递率稳定。
关键词:激光;耙浆平地机;振动;四参数法;隔振系统
0引言
近年来,水田耕整机正由单一型向复合型转变,由粗犷型作业向精细作业转变,由半自动向智能化转变。激光平地机以激光为测量信号来精确控制平地铲的高度和水平倾斜度,可实现自动化和精准化作业,在水田作业中的应用越来越广[1-2]。将耙浆埋茬机与激光平地机集成可实现水田耕整一次作业,减少拖拉机下地次数及机具对水田的破坏性,保护水田的生态环境;同时可提高生产效率,降低作业能耗。
由于土壤厚度高低不同,耙浆埋茬机在作业时,会产生剧烈的抖动,再加上拖拉机发动机的振动,这些振动经连接接头传到平地机,造成液压系统和姿态调整机构的抖动,对平地铲的姿态调整带来误差。特别是激光接收器支撑杆的前后左右剧烈抖动,严重影响接收器正常工作,进而造成激光平地作业失败。为此,设计了专用隔振系统,提高了支撑杆的装配精度,并通过试验验证该系统的隔振效果。
1整机振动性能分析
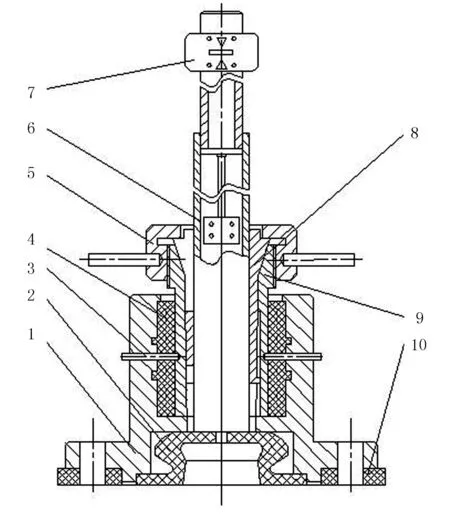
水田激光耙浆平地机由悬挂机构、耙浆埋茬机构、平地机构、液压控制系统、姿态调整机构和激光发射接收系统组成,如图1所示。该机可一次性完成水田耙浆埋茬平地作业,以激光信号作为基准平面通过液压控制系统调整平地铲的姿态,耕整后的田面平整度低于3cm。与普通耙浆平地机相比作业效率可提高30%左右,节省水肥投入20%左右,有利于水田可持续性耕作。

1.耙浆埋茬机构 2.三点悬挂机构 3.传动机构 4.变速器
农业机械的作业环境非常恶劣,振源和振动类型非常复杂,本文从对信号接收精度主要影响因素出发对激光耙浆平地机的振动特性进行分析。
1.1 振源分析
激光耙浆平地机振源主要来自拖拉机行走及其发动机产生的振动、耙浆埋茬机作业产生的振动及平地铲自身产生的振动3个方面。柴油发动机可产生高频周期性振动,对耕整机会带来直线颠簸和空间耦合摆动[3]。耕耙机的振动较复杂,既是受迫振动又是自激振动。邱白晶[4]对整机的随机振动进行了响应分析,提出对传动系统和旋耕刀轴系统进行优化,减小整机尺寸提高关键零部件的强度和刚度,可有效降低整机的振动。平地铲本身没有运动传递,其振动是由地面的高低不平和耕耙机振动引起,主要是受迫振动。通过对缓冲系统及运动特性优化,液压系统可吸收部分振动。但受以上振动影响最严重的是激光接收装置,由于支撑杆细长的结构和装配连接方式,这些振动会被进一步放大。
1.2 振动类型分析
通过分析激光接收装置产生振动的原因,支撑杆所受振动可分为自由振动、受迫振动,这些都是随机振动。按照振动方向,分为纵向振动、横向振动。
本文以自制样机作为大田试验对象,在激光接收器位置安装倾角和位移传感器,并借助频率测量仪,测得整机作业时的接收器与支撑杆的各项振动性能参数如表1所示。针对不同的作业要求将试验分为8组进行。
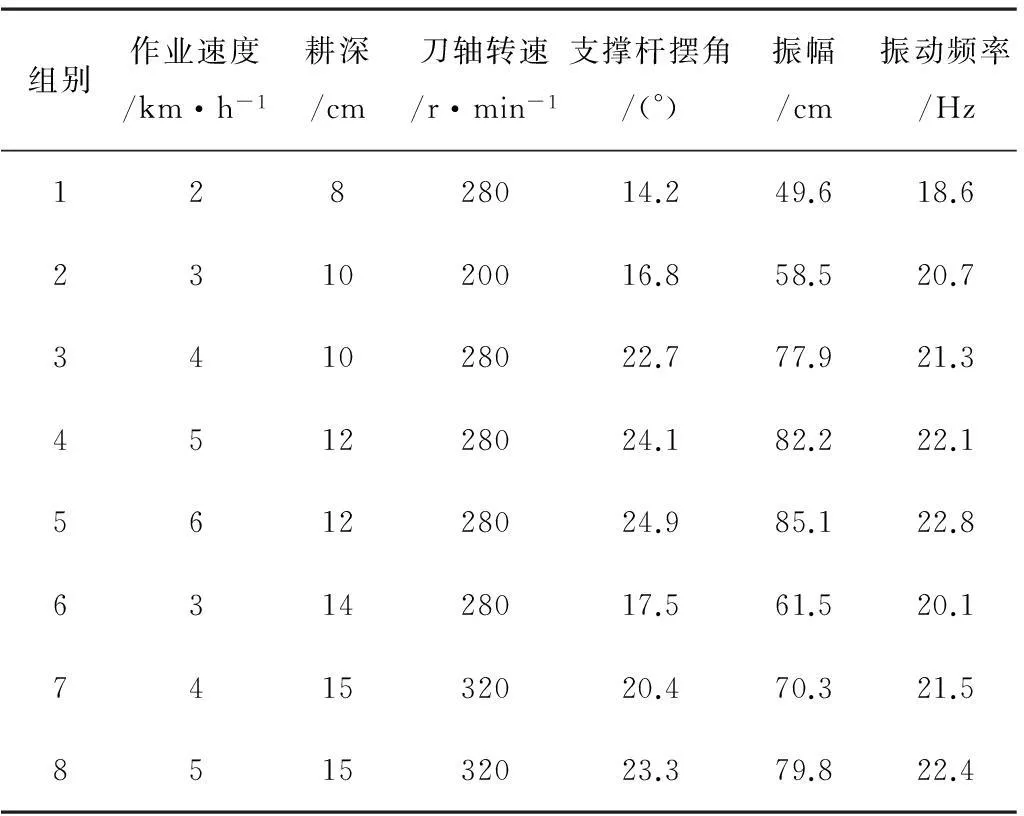
表1 接收器与支撑杆振动试验数值
从表1可得出:牵引机前进速度、耕深和刀轴转速越大,支撑杆摆角和振幅越大。这说明外部激励对接收器和支撑杆有强烈的振动激励作用,必须采取措施进行隔振消振。但三因素对振动频率影响不大,其原因可能是支撑杆存在自由振动。支撑杆摆角和振幅之间也不满足几何关系,这也进一步证明支撑杆所受振动包括自由振动和受迫振动。
2振动性能对作业精度的影响
正常情况下,支撑杆处于竖直状态固定在平地铲上,其长度在2m左右,直径0.03~0.05m,在平地铲的带动下做垂直上下运动。当平地铲处于高位时(如图2中B点所示),接收器接收不到激光信号,控制系统开始启动液压系统带动平地铲下降直到接收到信号为止。由于支撑杆的左右抖动,造成接收器在信号平面附近不停的晃动(如C点所示)。这样控制系统就会不停地计算当前位置,然后给液压系统发出动作指令,并反馈调整结果,系统始终处于运算状态,造成整个系统运算量大,动态响应速度慢。因此,消除激光接收器的振动是提高耙浆平地机作业精度的关键因素之一。
设支撑杆振动过程中摆角为α,则
Δh3=L(1-cosα)
(1)
水田作业时激光接收器竖直高度要超过牵引机高度,为防止激光信号被遮挡,所以支撑杆的长度L一般为2m左右。根据表1试验数值,支撑杆最大摆角α可达25°,将这两个数据代入式(1)可得△h3=18.7cm,接收器振幅达到85cm。以美国天宝(Trimblr)激光平地机为例,其激光接收器检测精度为±0.6cm,△h3数值远远超出接收器检测接收范围。这样控制系统会驱动液压系统升高,调整平地铲位置不停地寻找激光信号,系统一直处于修正状态,此时拖拉机已带动作业机具来到下一个位置D点,最终造成平地作业失败。
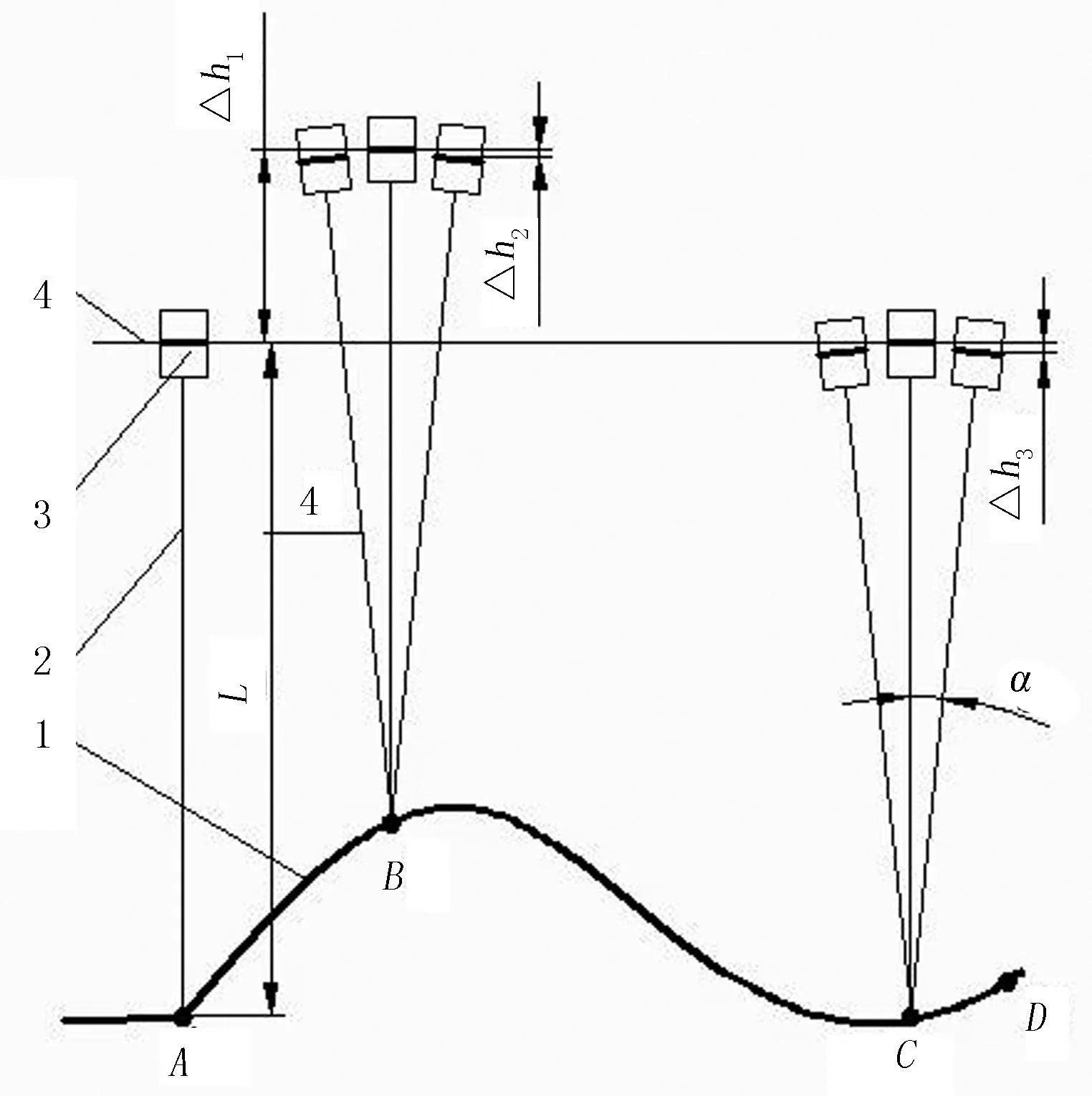
1.水田地表 2.支撑杆 3.接收器 4.基准平面
3隔振系统设计
3.1 隔振系统建模
支撑杆通过连接座与平地铲装配在一起,支撑杆底部和四周都可传递振动激励。因此,支撑杆与连接座之间的隔振既要考虑底部纵向减振,又要阻断横向激振。整个隔振系统设计为双层隔振,系统模型如图3所示。图3中,m1表示支撑杆和激光接收器,两者通过隔振系统固定在连接座上;m2表示连接座,通过隔振系统固定在平地铲上;平地铲和耙浆机被视为刚体基础,在基础上加上随机位移μ0作为输入激励。
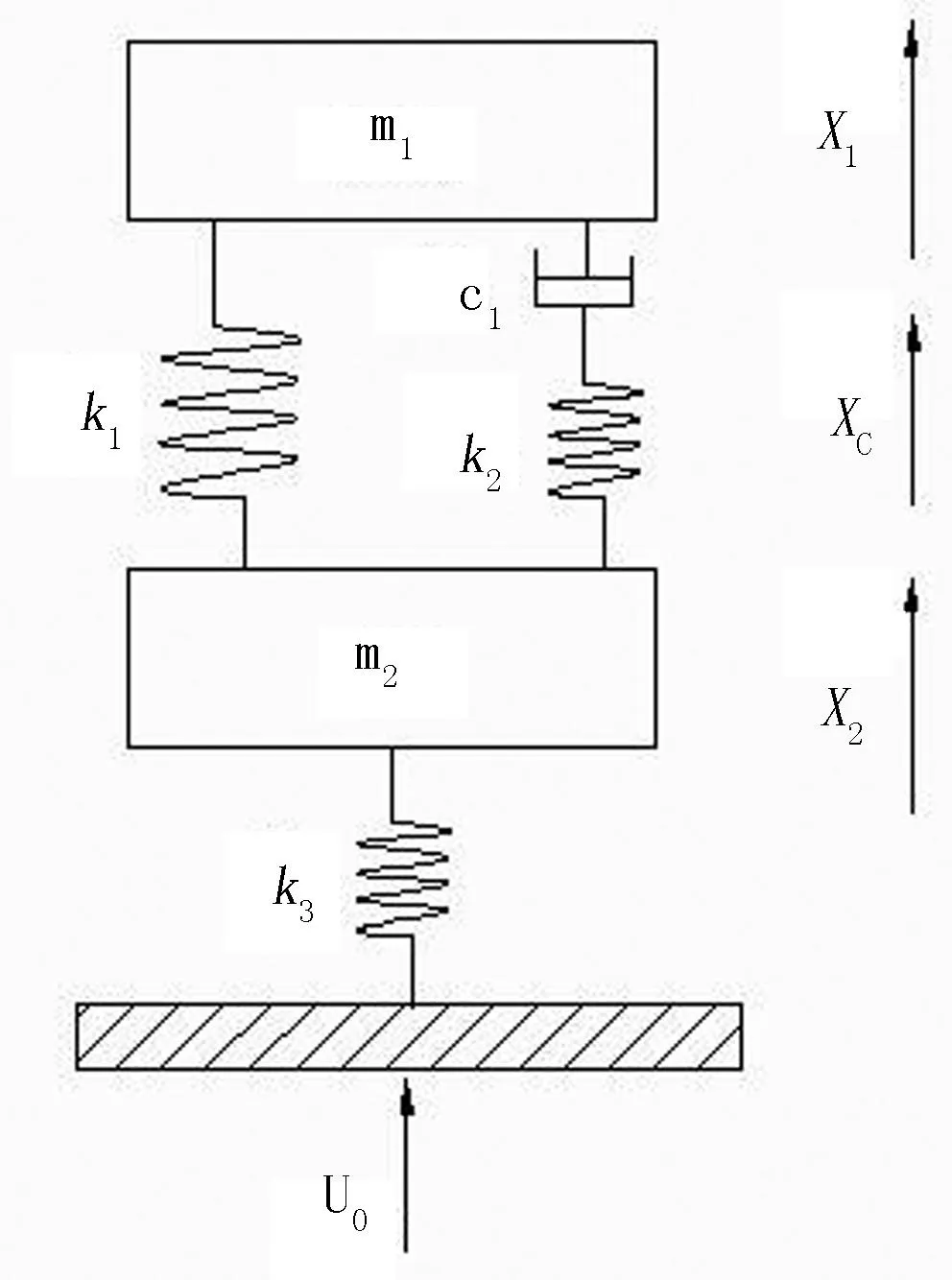
图3 隔振系统模型
借助动力学定律建立隔振系统的运动微分方程[5]为
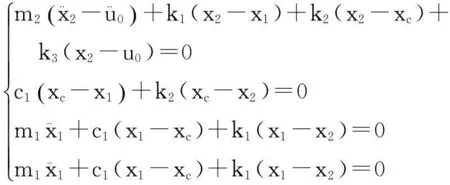
(2)
式中m1—被隔振物体质量;
m2—中间物体质量;
k1、k2、k3—刚度系数;
c1—阻尼系数;
x1、x2、xc、μ0—位移(mm)。
四参数法只考虑隔振系统的结构动特性,特别适合复杂结构系统的振动问题的分析设计[6]。对式(1)进行傅里叶变换,并运用四端参数法整个隔振系统可表示为[7]

(3)
令

(4)
由隔振传递率计算公式得[8-9]

(5)
式中Td—隔振传递率;
m1—被隔振物体质量;
m2—中间物体质量;
k1、k2、k3—刚度系数;
c1—阻尼系数;
x1、u0—位移(mm)。
设

(6)
则Td可写为

(7)
其中,μ为质量比;d为阻尼比;ω1为被隔振物体固有频率;ω2为中间物体固有频率;f为固有频率比;g为扰频比;N为刚度比。
3.2 隔振系统优化求解
按照式(7)对Td进行优化计算便可确定被隔振物体与中间物体的各项参数的最优取值。
隔振系统包含大量的模糊因素, 具体表现在设计变量的模糊性及约束条件的模糊性。本文采用模糊优化理论,建立被隔振物体与中间物体的各项参数与隔振传递率间的多目标模糊优化数学模型,采用粒子群算法对变量进行优化搜索。
3.2.1优化函数构建
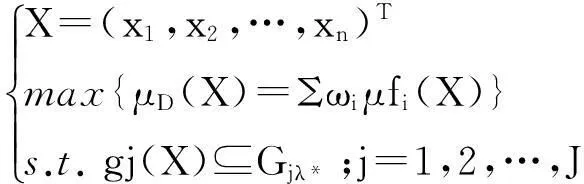
由于激光信号接收器外形结构与质量一定,所以质量m1、ω1是已知条件,选取m2、ω2、k1、k2、k3、c1为设计变量。这些参数决定隔振传递率,即
X=(x1,x2,x3,x4,x5,x6)T=(m2,ω2,k1,k2,k3,c1)T
(8)
隔振系统设计的主要目的是保证传递率最小和稳定性,因此选取Td为目标函数,为考察分别中间物体、刚度系数和阻尼系数等不同参数对Td的影响,同时考虑减少计算量,构建如下4个目标函数,有
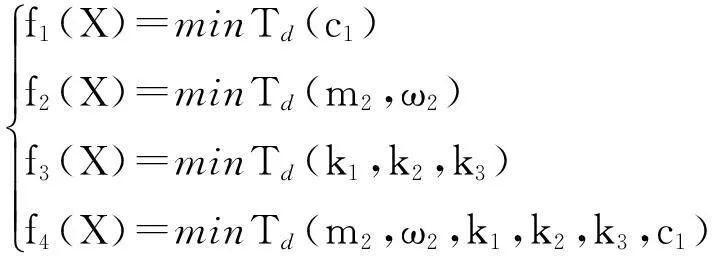
(9)
然后按照按照式(6)、式(7)构造目标函数式(9)。
设计变量m2、ω2、k1、k2、k3、c1之间存在相互影响,且取值范围既要考虑设计制造水平,又要考虑材质,存在不同程度的模糊性,难以准确的去判断。采用模糊表达方式确定变量的上下界约束条件为
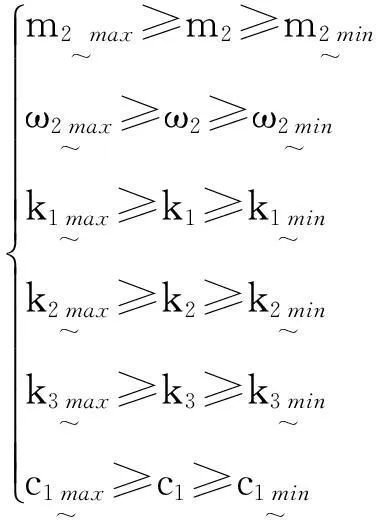
(10)
式(8)~式(10)构成了求解传递率最优值的模糊优化函数模型。
3.2.2多目标模糊优化的求解
由于约束的模糊性, 为了获得模糊目标集, 应用λ最优水平截集法将模糊约束的允许区间转化为实数论域上的一个普通集合[10],则

(11)
其中,λ*为最优值。按照式(11)可求得式(9)中各子目标函数在普通集合条件下的约束最优解。
接下来构造各子目标函数模糊目标集的隶属函数[11],有
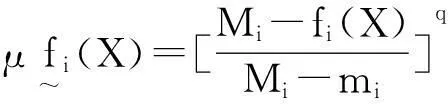

(12)
考虑到各子目标函数的贡献率应包含在同一模糊集合之中, 此模糊集合的隶属函数可取为[12]
(13)

(14)
对式(14)运用粒子群算法寻找全局最优值,最终结果如表2所示。
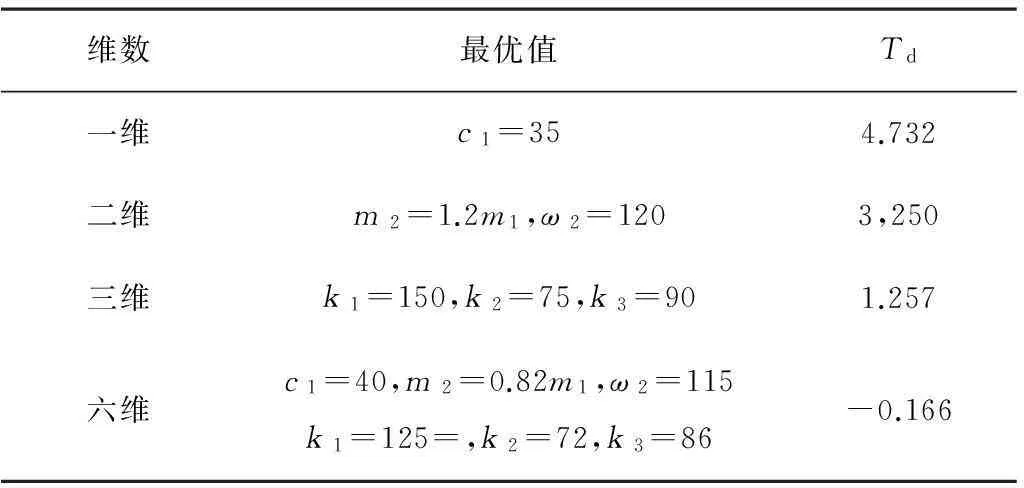
表2 多目标模糊优化的最优值和最优解
3.3 隔振系统结构设计
在理论分析计算的基础上,本文完成了整个隔振系统的结构设计,如图4所示。为隔断纵向振动,考虑到空间尺寸和装配工艺问题,在连接座与平地铲之间添加减振垫,在支撑杆与平地铲之间加入特制橡胶隔振器。为隔断横向激振,在支撑杆与连接座之间设计了弹性筒夹、锥套与隔振环,三者配合消除了支撑杆与连接座之间的配合间隙,保证支撑杆安装时的垂直精度,使现场作业操作更简便和快速。
1.连接座 2.隔振器 3.销钉 4.隔振环 5.螺母
在弹性筒夹通过自身弹性吸收部分激振,减振环采用橡胶材料,经减震槽可靠地固定到底座上,进一步减小支撑杆的纵向振动。
隔振器做成中空的环形装,靠橡胶自身的阻尼特性和内部残留空气的压缩,减小支撑杆的纵向振动,其结构如图5所示。该隔振器即考虑了其隔振传递率,又不会人为地增加整个支撑杆的安装难度和高度。
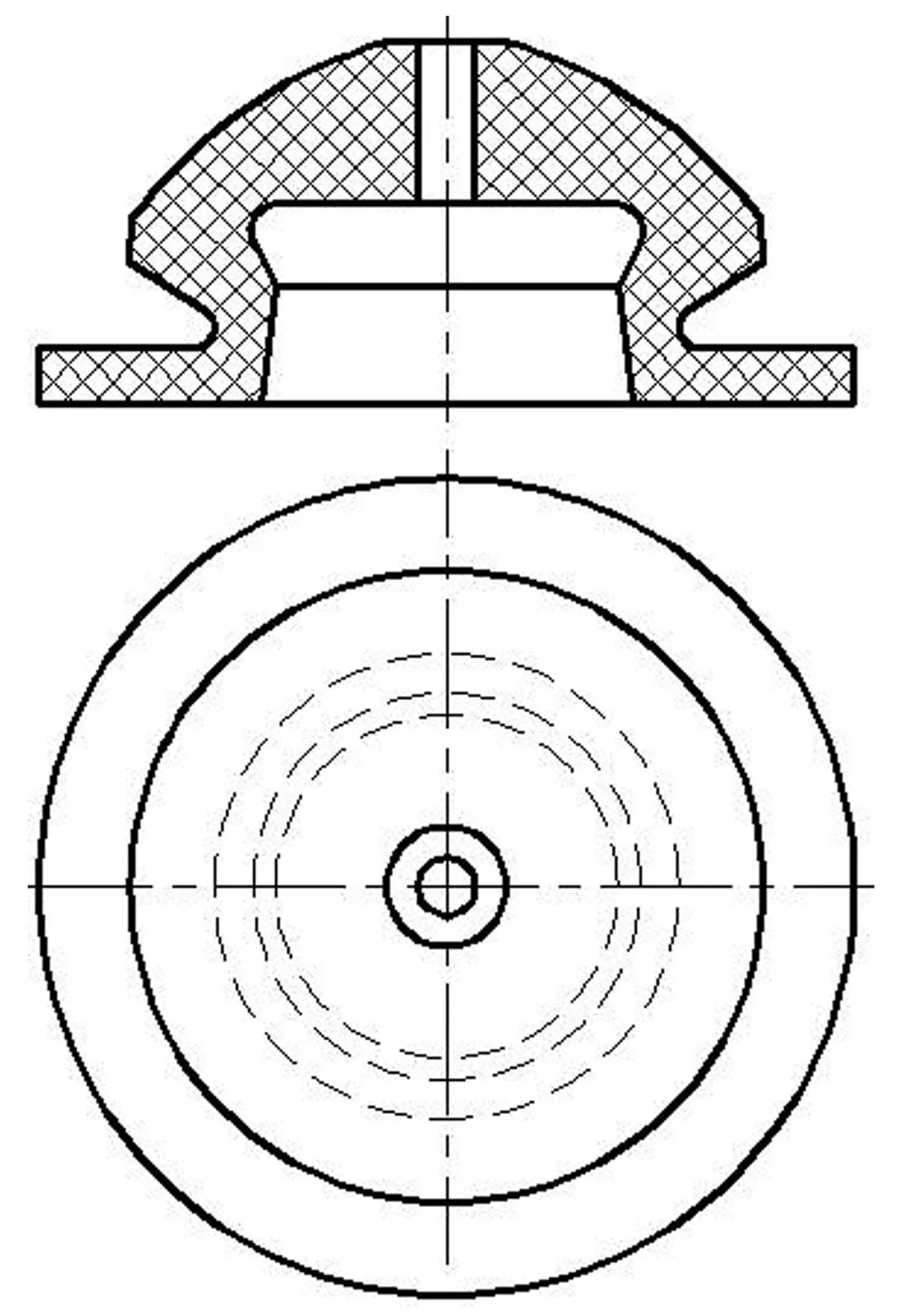
图5 隔振器结构
4试验验证
为验证隔振系统的隔振效果,进行了数次试验,试验系统如图6所示。试验在1-3 000Hz/SZT型四度空间振动平台上完成,该平台可实现垂直、水平正负方向的单独振动和多个方向的组合振动,振动频率在1~3 000Hz之间,可较好地模拟水田作业真实振动情况。
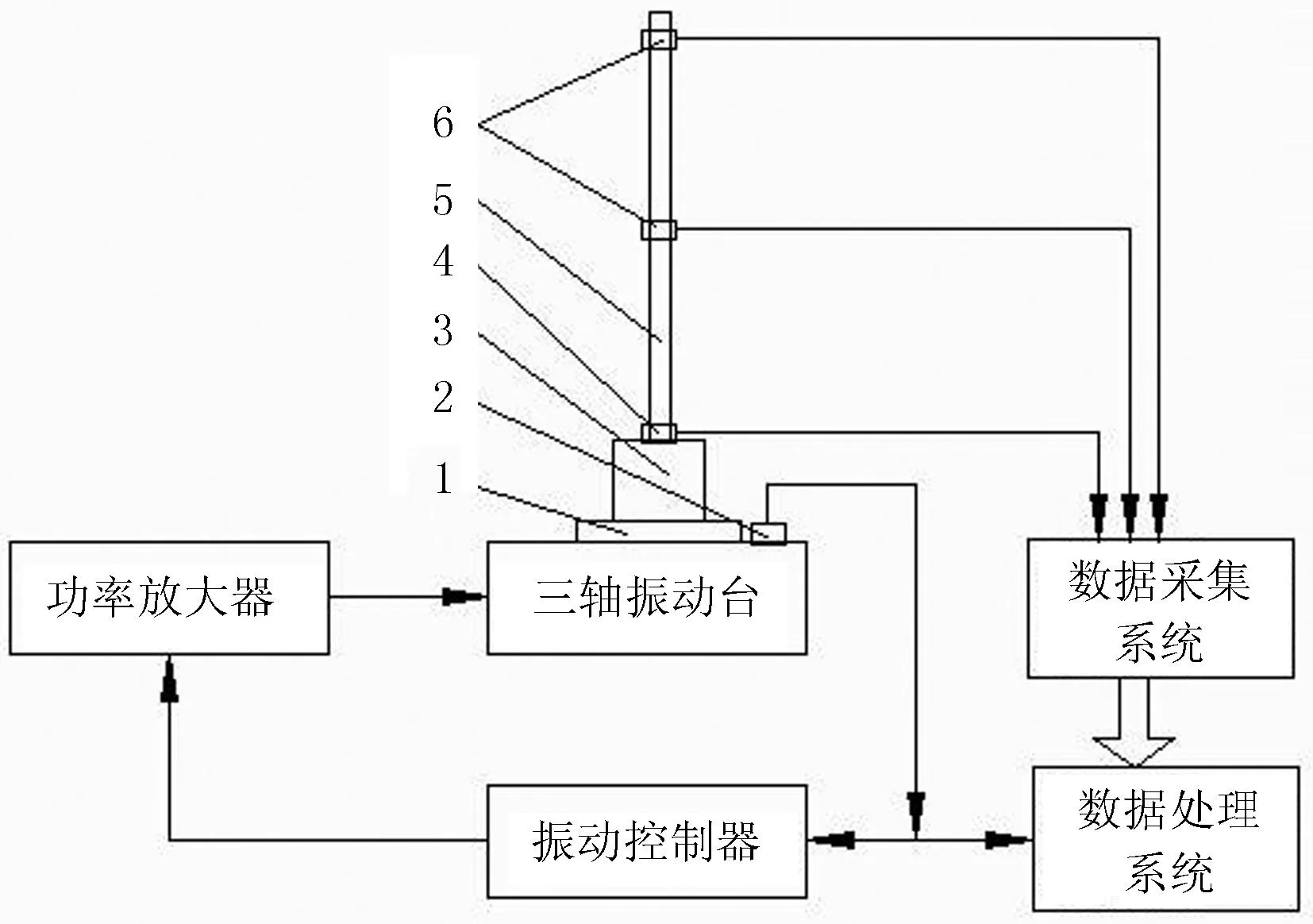
1.夹具 2.传感器 3.隔振系统 4.振动频率测量仪
试验分为两组进行:第1组是激光接收器支撑杆直接通过无减振隔振性能的夹具固定在振动平台上;第2组是激光接收器支撑杆通过隔振系统固定在振动平台上,支撑杆与连接座的连接、激光接收器与支撑杆的连接完全按照实际生产中的情况处理。在振动台相同的输入情况下,分别测量两种情况下支撑杆的振幅和振动频率。在支撑杆中部、激光接收器固定位置处分别设置两组位移传感器,用来测量支撑杆的摆动角度和位移。支撑杆的底部安装一振动频率测量仪来测量其振动频率。测量数据经数据采集系统传输到电脑经处理系统处理生成图表,便于进一步分析。
由试验结果可看出本文设计的隔振系统的效果良好。由图7得出:隔振系统将激光接收器的横向振幅控制在6mm以下,在高频阶横向振幅比未隔振情况下减少了4倍左右,根据接收器高度可计算出其摆动角度从25°减小到2°左右,保证了接收器不会偏离激光信号。图8隔振传递率曲线进一步说明该系统在高频阶段的性能比较稳定。低频阶段波动较大,这与系统的固有频率有关,系统产生了共振。
从图9中看到:当输入频率为20Hz时,隔振系统输出频率在初始阶段下降了50%左右,随着时间的推移振动频率出现一定波动,这与支撑杆的细长结构产生的共振以及激光接收器自身质量有关,需进一步从材料和结构上对支撑杆及接收器的固定方式进行改进。与表1相比较,试验数据与田间样机试验数据比较吻合。
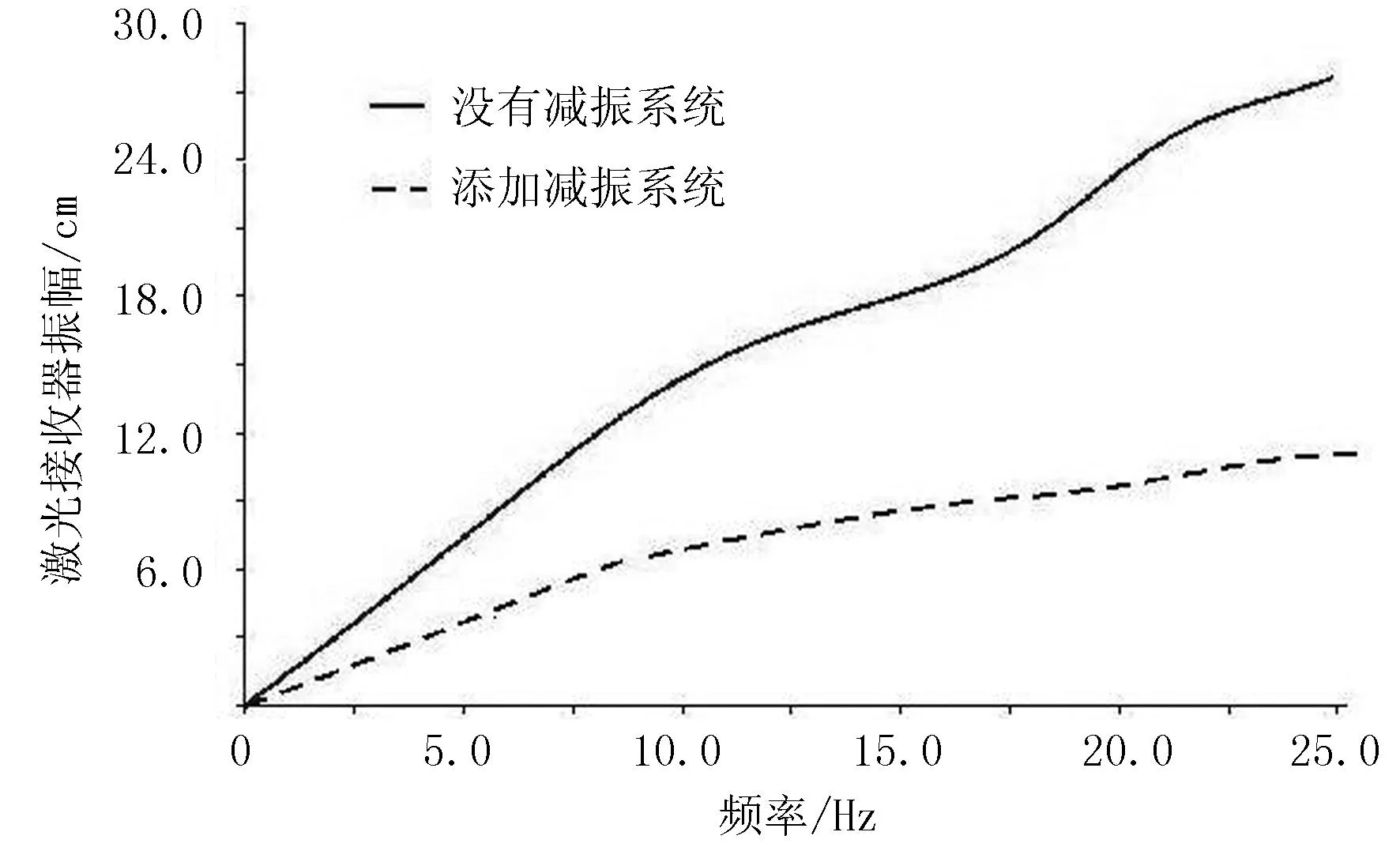
图7 激光接收器振幅变化曲线
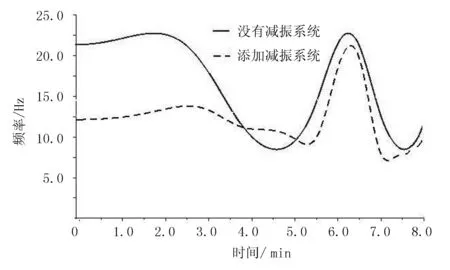
图8 隔振传递率曲线
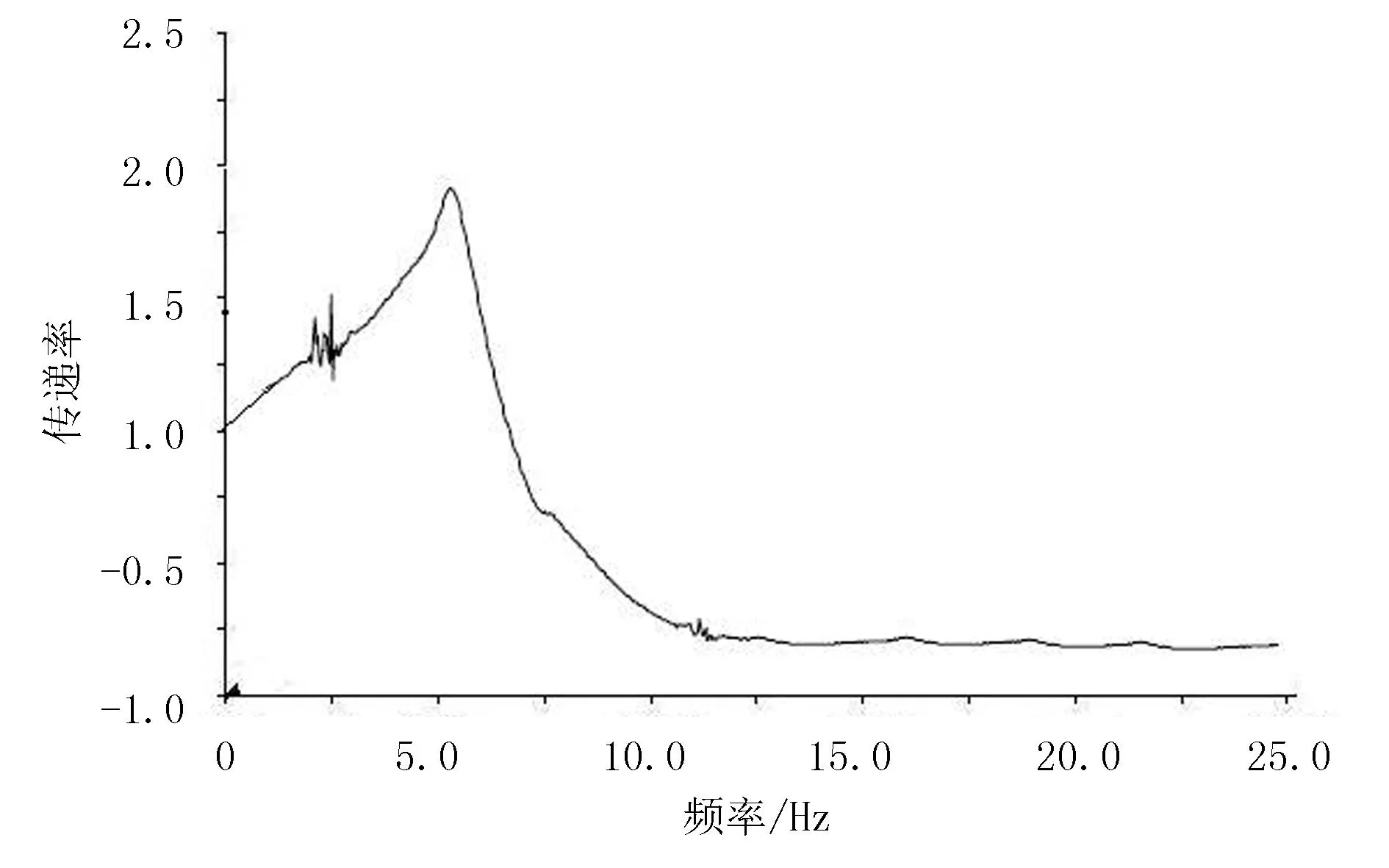
图9 频率变化曲线
5结论
1)在系统分析了激光耙浆平地机的振动性能基础上,提出二级隔振方法,运用动力学原理和四端参数法,建立了二级隔振系统模型。
2)采用模糊优化方法对隔振系统的各项参数进行求解,在此基础上完成隔振系统的结构设计。该二级隔振系统由隔振器、减振垫和隔振环及弹性筒夹组成,前两者用来隔断纵向激振,后两者用来隔断横向激振。
3)试验表明:该隔振系统隔振效果较好,支撑杆最大摆角从25°减小到2°左右,激光信号接收器振幅控制在6cm以下,隔振系统系统振动传递率稳定,大大提高了耙浆平地机的激光信号接收精度。
4)支撑杆自身的细长结构和接收器质量会引起自由振动, 从材料、 结构上对其进行改进是后续研究的重点。
参考文献:
[1]黎永键,赵祚喜.水田激光平地机平地铲姿态测量系统的设计[J].农机化研究,2012,34(2):69-75.
[2]胡炼,罗锡文,林潮兴.1PJ-4.0型水田激光平地机设计与试验[J].农业机械学报,2014,45(4):146-151.
[3]裴克良,孔凡增,王文生.农业机械的振动问题与减振方法的研究[J].农机化研究,2006(5):79-81.
[4]邱白晶.旋耕机整机试验模态分析[J].农业机械学报, 1994,25(2)∶24-29.
[5]胡海岩.机械振动与冲击[M].北京:航空工业出版社,1998.
[6]胡润昌.隔振理论及隔振器[M].哈尔滨:哈尔滨工业大学出版社,2003.
[7]屈维德,唐恒龄.机械振动手册[K].北京:机械工业出版社,2000.
[8]丁文镜.减振理论[M].北京:清华大学出版社,1988.
[9]宋维源,李忠华.双级隔振器系统参数选择的研究[M].辽宁工程技术大学学报:自然科学版,2002,16(1):9-11.
[10]谢庆生,罗延科,李屹.机械工程模糊优化方法[M].北京:机械工业出版社, 2002.
[11]叶秉良,俞高红,赵匀.拖拉机最终传动多目标模糊可靠性优化设计[J].农业机械学报,2010,41(4):96-100.
[12]魏燕定,赖小波,陈定中.两级振动隔振系统参数优化设计[J].浙江大学学报:工学版,2006,40(5):893-896.
Study on Vibration Characteristics of Laser Leveler Installed on a Tillage Machine in Paddy Field
Sun Qixin, Chen Shufa, Yang Jin, Lu Xinchun
(College of Mechanical Engineering, Huaihai Institute of Technology, Lianyungang 222005, China)
Abstract:Laser leveler installed on a tillage machine in paddy field means the development direction of agricultural equipment.The accuracy improvement of laser signal receiving is one of the key factors for its popularisation. In this paper, the factors which influnced laser signal receiving accuracy were analysised on the basis of the characteristics of multifunction tillage machine. Laser leveler installed on a tillage machine was the coupling of free vibration and forced vibration which drove the the laser receiver fixed on stand bar swing.Firstly,the model of vibration isolation system was built based on the kinetic equations and four-pole parameters theory.Secondly, fuzzy optimization method was used to optimize the vibration isolation system .Thirdly, according to the system model, the structure desgin of vibration isolation system was achieved.Finally,a test was designed to verify the vibration isolation system upon vibration test stand.The prediction results showed that the vibration isolation system was reliable to laser leveler installed on a tillage machine.The lateral amplitude of the receiver was less than 6mm,and the swing angle of the supporting rod was reduced from 25 to 2 degrees.
Key words:laser; tillage machine; vibration; four-pole parameters; vibration isolation system
中图分类号:TP18;S222.3
文献标识码:A
文章编号:1003-188X(2016)11-0028-06
作者简介:孙启新(1976-), 男,江苏连云港人,讲师,(E-mail)sunqixinsd@163.com。
基金项目:苏北科技发展计划项目(BN2014020);连云港市农业攻关项目(CN1413)
收稿日期:2015-10-14
