基于遗传算法和EDA技术的果蔬采摘机器人设计
2016-03-23刘志刚
熊 琼,葛 蓁,刘志刚
(1.武汉工商学院 信息工程学院,武汉 430200;2.南昌工学院,南昌 330108)
基于遗传算法和EDA技术的果蔬采摘机器人设计
熊琼1,葛蓁1,刘志刚2
(1.武汉工商学院 信息工程学院,武汉430200;2.南昌工学院,南昌330108)
摘要:为了提高果蔬采摘机器人的避障和路径规划能力,实现机器人智能化和轻量化的设计,将嵌入式系统引入到果蔬采摘机器人的控制系统中,并利用EDA技术对控制系统进行了封装,植入了机器人路径规划的遗传算法。对果蔬采摘机器人的机械手进行了改进,通过机械手结构设计实现了采摘机器人执行末端的避障功能,利用遗传算法智能控制设计实现了复杂环境中的路径搜索功能。对果蔬采摘机器人的性能进行了测试,结果表明:障碍物识别率高达99%以上,路径规划的准确率也在95%以上,满足智能化采摘机器人的设计需求,为现代化采摘机器人的设计提供了较有价值的参考。
关键词:采摘机器人;遗传算法;嵌入式系统;执行末端
0引言
随着嵌入式控制系统的轻量化和智能化水平的提高,微型机器人和特种机器人也得到了大力的发展,使得机器人的智能化和结构都有了大幅度的提升。例如,索尼的机器狗是典型的嵌入式机器人控制系统,除了能够实现复杂的运动之外,还具有语音和图像的识别能力,可以实现人机交互的智能化功能。火星探测车也是个很好的典型嵌入式控制系统机器人例子,利用VxWorks操作系统,可以实现自主的工作。将嵌入式系统引入到果蔬采摘机器人的控制系统中,可以大大提高机器人的智能化和轻量化水平,对于果蔬机器人的现代化设计具有重要的意义。
1果蔬采摘机器人嵌入式系统总体设计
对于嵌入式系统的机器人来说,机器人的运动控制部分一般采用ARM 7来完成。这主要是由于整个系统对实时性要求较高,利用ARM 7来专门控制伺服能更好的满足要求。果蔬采摘机器人电机控制结构图,如图1所示。
ARM7利用串口通信功能,可以实现数据的采集,并利用通信串口协议来解析数据,得到电机的转向和转速等信息,实现电机的优化控制。在电机的控制过程中,可以利用电机驱动程序控制电机的运动,实现机器人的避障和路径规划功能。

图1 果蔬采摘机器人电机控制结构框图
图2为果蔬机器人总体设计框架图。在嵌入式系统中引入遗传算法,在遇到障碍物时,使用摄像头拍摄现场图像,利用OPENGL仿真将预演用户所输入的机器人控制命令后机器人的运动轨迹及动作反解功能,将数据传送到实时控制板ARM7;使用伺服电机控制机器人关节的运动,从而实现机器人的自动路径规划功能。
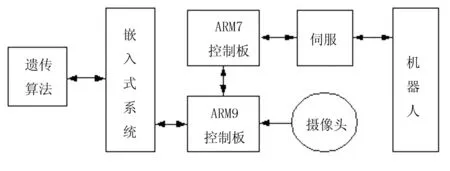
图2 果蔬采摘机器人总体设计框图
2果蔬采摘机器人结构和控制系统设计
为了满足果蔬采摘机器人自动避障设计需要,需要对果蔬采摘机器人的末段臂进行改造。其中,末端臂主要由4部分组成,包括关节的法兰、丝杠和螺母机构、碰撞感知传感器、伸缩管组。
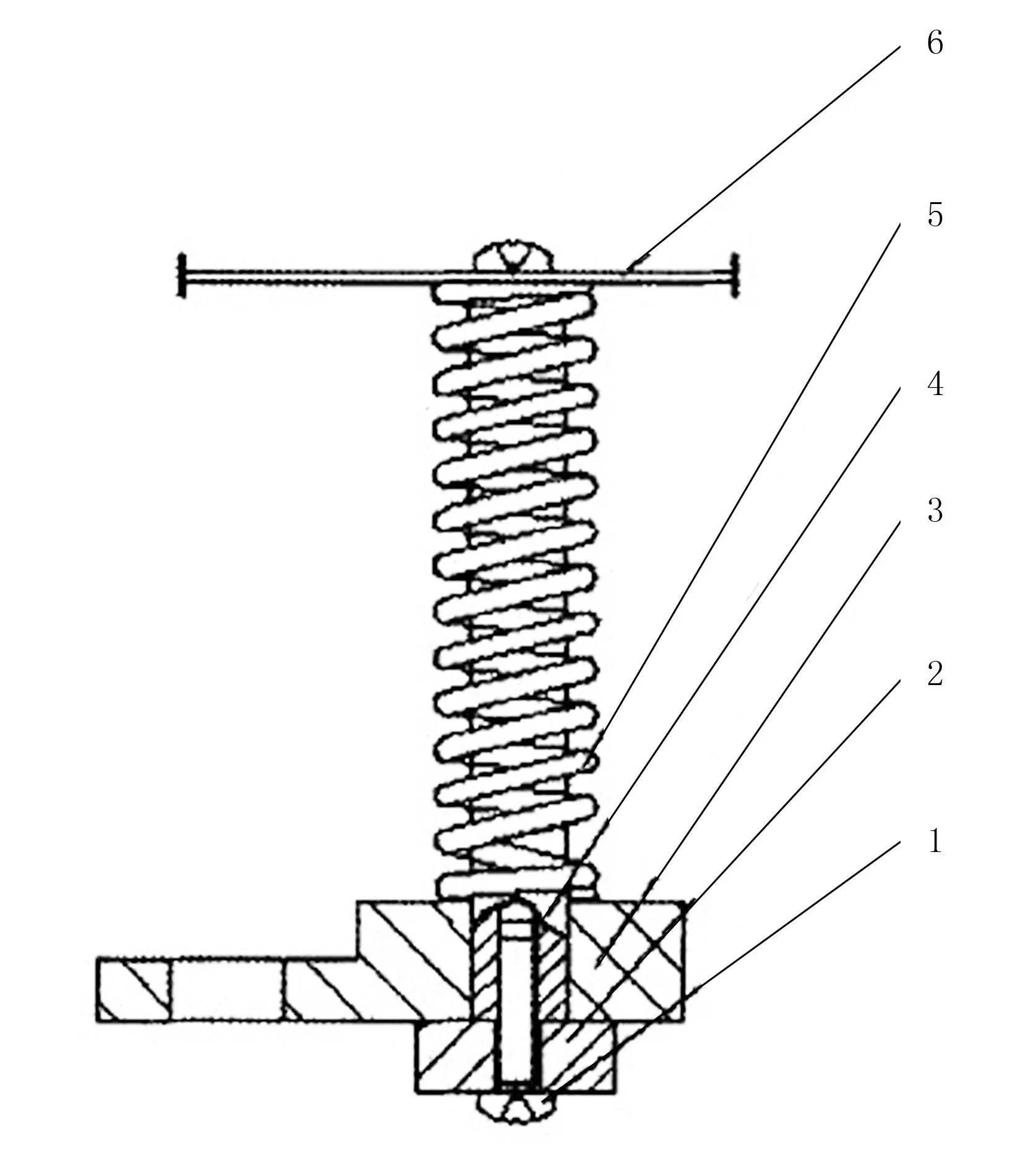
图3为果蔬采摘机器人执行末端的结构设计图。其中,末端臂利用法兰与机器人大臂相连接,可以实现转动,完成俯仰动作;伸缩杆利用丝杠和螺母结构实现伸缩功能;末端臂装有3组碰撞传感器,可以预测危险碰撞,从而达到躲避障碍物的功能。
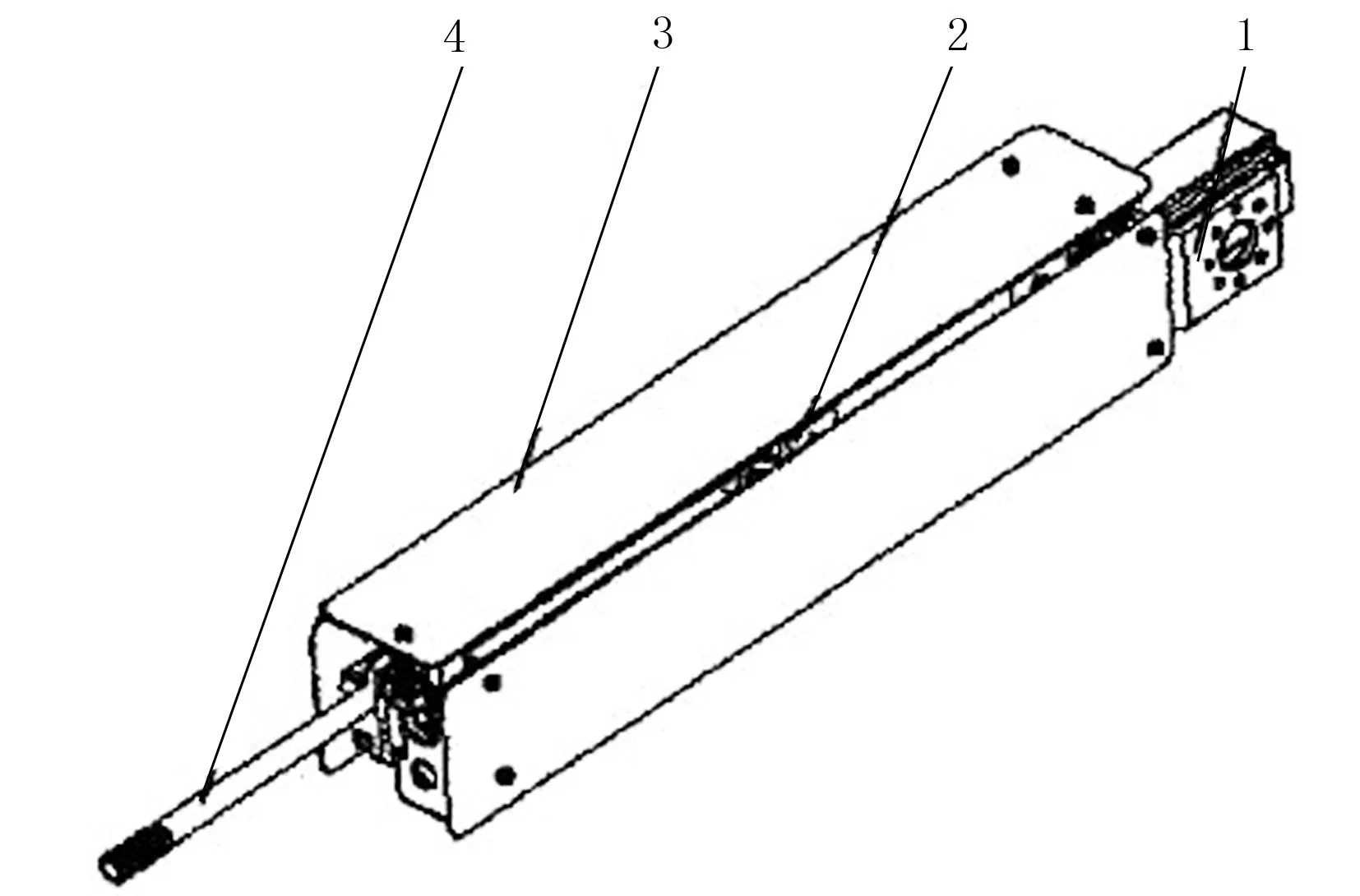
1.关节法兰件 2.丝杠和螺母机构 3.碰撞感知传感器 4.伸缩秆
图4为执行末端伸缩动作的过程设计图。其伸缩功能主要是利用伺服电机的输出,将转动转换为位移,从而带动伸缩杆实现执行末端的伸缩功能。碰撞传感器的设计如图5所示。
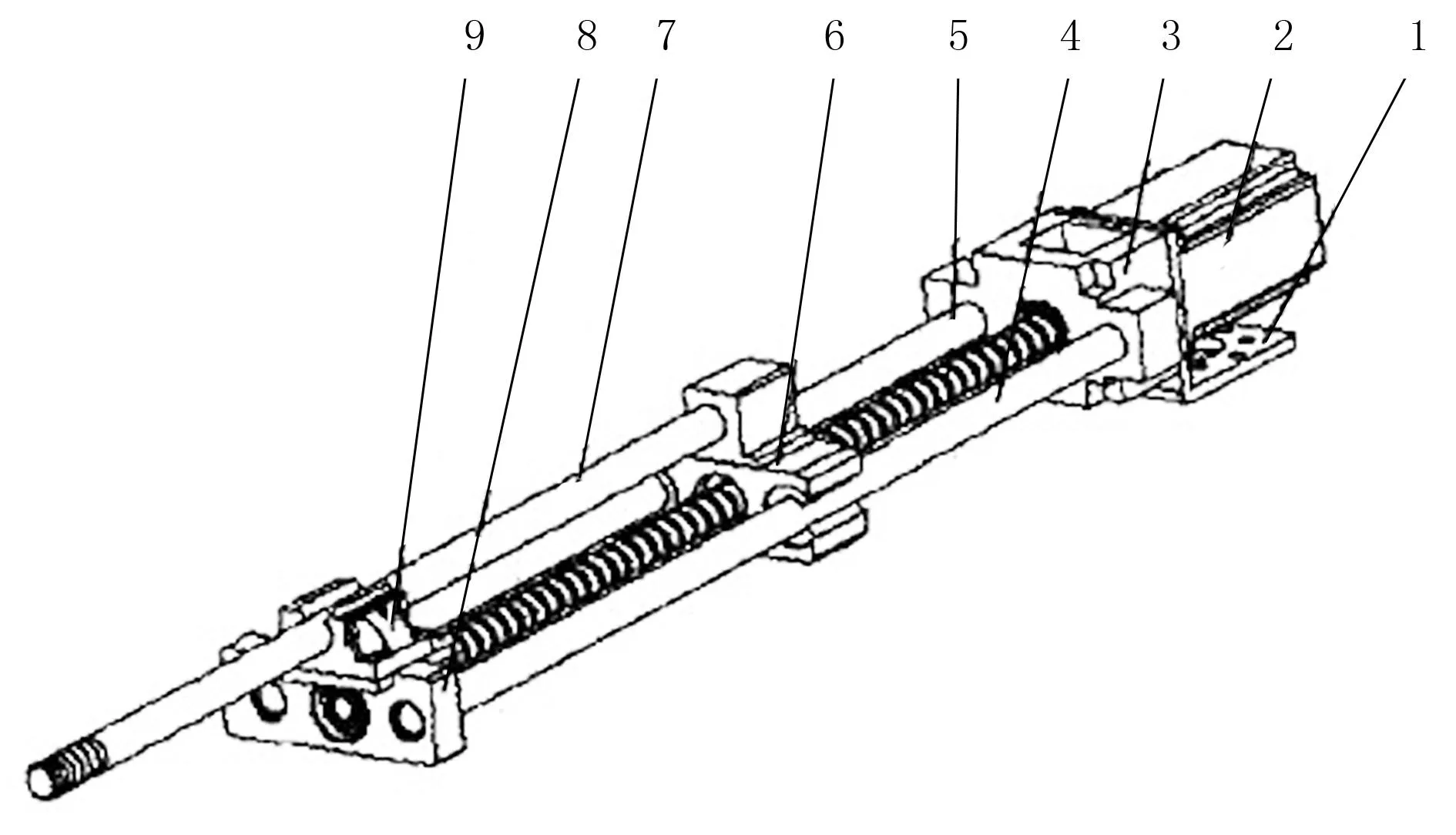
1.大臂关节法兰件 2.交流伺服电机 3.架体 4.导杆 5.丝杠
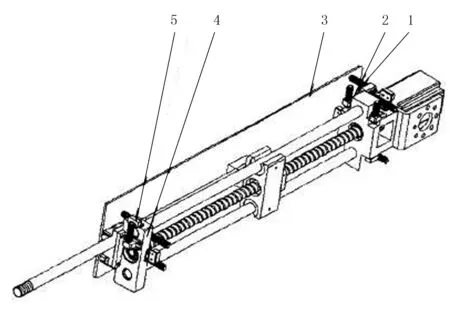
1 .弹簧组件 2.架体 3.碰撞片 4.支撑架 5.开关组件
工作时,在伸缩臂的面上装有弹性碰撞片,当弹性碰撞片接触到障碍物后可以产生力信号;当力信号达到一定大小时限位开关启动,向机器人发出信号,提示遇到障碍物,需要通过调整行驶路径,躲避障碍物,继续进行果实采摘。弹簧组件,设计如图6所示。
1.螺钉 2.圆柱卡片 3.弹簧支撑架
图6中,导柱和压缩弹簧直接进行连接,顶端和碰撞弹性片相连,将压缩弹簧固定;卡片和导柱相连接,卡片的孔需要大于光孔直径,将碰撞片进行限制,从而保证了其不会从架体内部飞出。控制系统采用EDA嵌入式系统,利用FPGA来设计控制核心部件。控制电路由4部分组成,其中包括电路控制器、FPGA、驱动电机和数码显示管,如图7所示。
FPGA是现场可编程逻辑器件,是控制的核心部件,是实现机器人避障和路径规划的主要部件,可以将编写好的verilog HDL程序烧制到现场可编程逻辑器件FPGA中,通过控制输入电路把信号输入到FPGA,通过相关算法进行机器人的路径规划和避障。根据设计要求,将基于EDA的硬件进行连接,连接完成后的硬件如图8所示
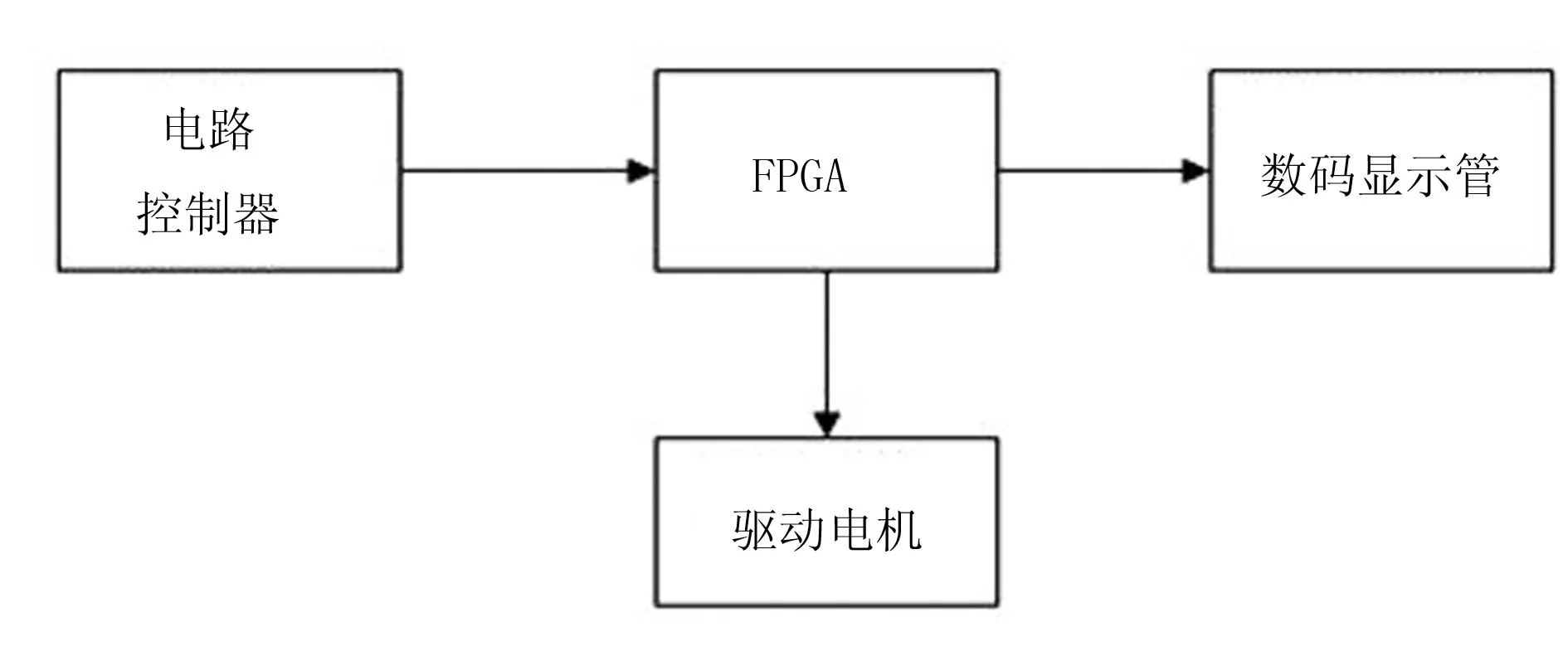
图7 嵌入式控制系统原理方框图
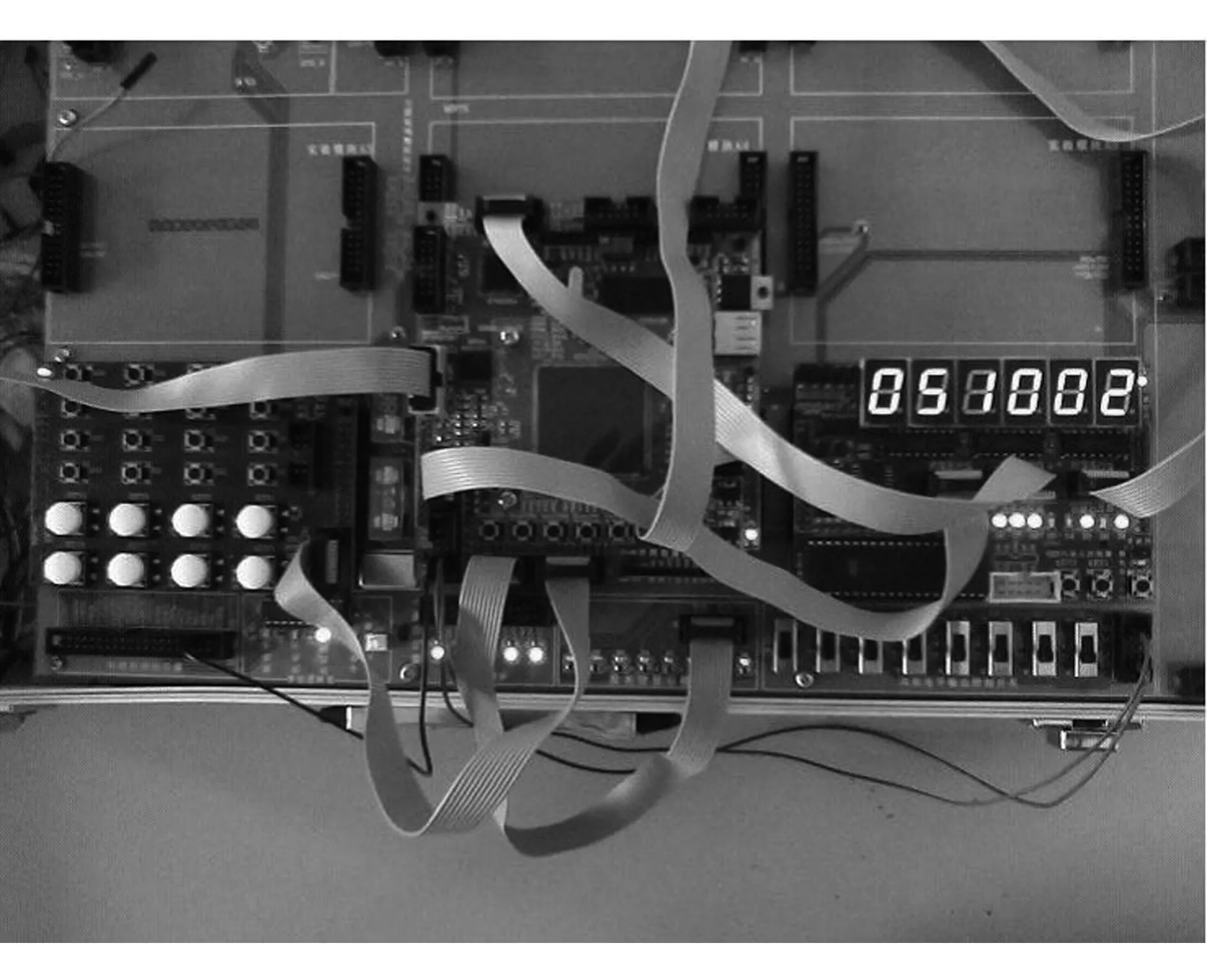
图8 控制系统硬件连线图
将编写好的程序代码下载到实验箱的FPGA芯片中,即可实现机器人的避障功能。为了实现机器人的智能化控制,可以利用遗传算法对机器人路径规划控制系统进行优化,遗传算法起到搜索最优路径的功能,其设计核心是功能函数设计。为了使搜索路径最小,需要求得最小值函数,可将最小值函数转换为求最大值函数,其表达式为
minf(x)=max[-f(x)]
(1)
其中,f(x)表示路径轨迹的目标函数。如果所需求的目标函数总为正值,可以直接设定个体的适应度值F(x)就等于相应的目标函数值f(x),其表达式为
F(x)=f(x)
(2)
适应度可以利用目标函数的变化形式来定义,则
(3)
其中,Cmin为一个适当的相对较小的数,适应度或可以写成
(4)
则对于目标函数的最小值优化问题可转换为
(5)
或者
(6)
遗传算法的基本步骤是首先随机产生若干机器人轨迹目标函数群体f(x),每个个体的适应度可以利用适应度函数来求取;适应度低的染色体被抑制,适应度高的染色体得到继承,然后通过以下步骤完成遗传算法。
1)选择:按照一定的优化原则,选择t代的群体f(x)中的优秀个体,将这些个体遗传到下一代的群体f(x+1)中。
2)交叉:将群体中的个体进行搭配,搭配的过程是随机配对的过程,利用个体间的交叉概率来交换染色体。
3)变异:对群体f(x)中的每个个体,通过一定的变异概率,改变染色体的基因,通过复制操作,将结果向这更优化的方向迭代计算,从而适应环境,得到最优路径规划。
3果实采摘机器人性能测试
为了验证EDA嵌入式系统的果实采摘机器人采摘性能,对采摘机器人进行了测试,测试实验对象为黄瓜采摘机器人。在机器人控制系统中引入了EDA嵌入式结构和遗传算法,其测试场景如图9所示。

图9 测试场景图
图9中,测试对象主要是机器人躲避障碍物的功能,包括使用遗传算法和不使用遗传算法两种形式。在不使用遗传算法对机器人避障功能进行测试时,得到了如图10所示的路径规划结果。

图10 机器人路径规划结果图
在黄瓜采摘的过程中,机器人可以在复杂的作业环境下成功地绕过障碍物,从而到达到终点。为了验证遗传算法的优越性,对遗传算法的路径规划性能进行了测试,结果如图11所示。
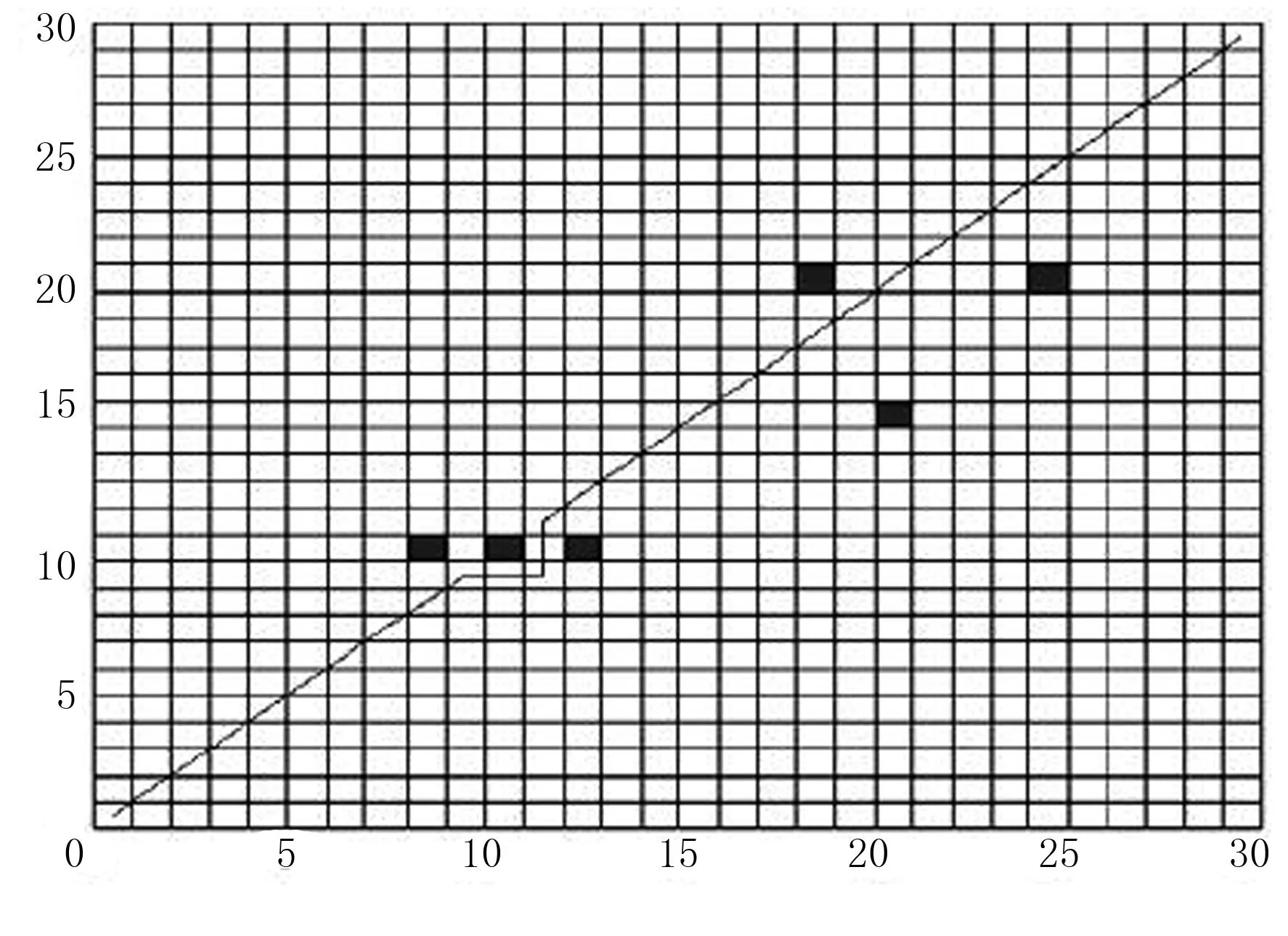
图11 遗传算法采摘机器人路径规划结果图
与一般算法不同,遗传算法可以将搜索区域形成栅格,然后再进行路径规划,从而提高路径规划的精确性。在此,对遗传算法的采摘机器人进行了多次测试,最终得到了如表1所示的结果。

表1 障碍物识别和路径规划测试表
由表1可以看出:机器人成功识别障碍物的概率较高,成功率达到了99%以上、路径规划的准确率也达到了95%以上,满足了采摘机器人的作业设计需求。
4结论
1)对果蔬采摘系统的执行末端进行了改进,提高了其自动避障的功能。在果蔬采摘机器人的设计过程中引入了嵌入式系统,并结合EDA技术植入了遗传算法,对机器人的控制系统进行封装后,大大提高了提高果蔬采摘机器人轻量化和智能化水平。
2)对嵌入式系统的果蔬采摘机器人进行了测试,结果表明:机器人在果蔬采摘过程中可以成功规避障碍物,障碍物识别率高达99%以上,路径规划的准确率在95%以上,智能化水平和作业精度较高。
参考文献:
[1]许斯军,曹奇英.基于可视图的移动机器人路径规划[J].计算机应用与软件,2011(3):220-222.
[2]尹建军,武传宇,YangSimonX,等.番茄采摘机器人机械臂避障路径规划[J].农业机械学报,2012(12):171-175.
[3]姬伟,程风仪,赵德安,等.基于改进人工势场的苹果采摘机器人机械手避障方法[J].农业机械学报,2013(11):253-259.
[4]周芳,朱齐丹,赵国良.基于改进快速搜索随机树法的机械手路径优化[J].机械工程学报,2011(11): 30- 35.
[5]梁喜凤,王永维,苗香雯.番茄收获机械手避障运动规划[J].农业机械学报,2008,39(11):89-93.
[6]宋勇,李贻斌,栗春,等.基于神经网络的移动机器人路径规划方法[J].系统工程与电子技术,2008(2):316-319.
[7]张美玉,黄翰,郝志峰,等.基于蚁群算法的机器人路径规划[J].计算机工程与应用,2005(25):34-37.
[8]孔令军,张兴华,陈建国.基本蚁群算法及其改进[J].北华大学学报:自然科学版,2004(6):572-574.
[9]罗德林,吴顺祥.基于势场蚁群算法的机器人路径规划[J].系统工程与电子技术,2010(6):1277-1280.
[10]董丽梅.山地播种机的研究与设计[D].兰州:甘肃农业大学,2009:19-21.
[11]徐云峰.小型免耕播种机的设计及试验研究[D].北京:中国农业大学,2005:22-24.
[12]高焕文,李问盈,李洪文.中国特色保护性耕作技术[J].农业工程学报,2003,19(3):1-4.
[13]王晋生,王桂英.机械化播种实践[J].农业技术与装备,2009(9):21-22.
[14]刘蕴贤,倪道明,李从华,李道珍.不同施肥方法对水稻生长及稻田周围水体污染的影响[J].天津农业科学,2007,13(1):31-34.
[15]吴子岳,高焕文,张晋国.玉米秸秆切断速度和切断功耗的试验研究[J].农业机械学报,2002,32(2): 38- 41.
[16]何伟,陈彬,张玲.DSP/BIOS在基于DM642的视频图像处理中的应用[J].信息与电子工程,2006,4(1): 60- 62.
[17]韦艳,陈华根.GPS定位显示中的坐标转换[J].海洋测绘,2010,30(3):16-19.
[18]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[19]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[20]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[21]张宁,廖庆喜.我国小粒径种子播种技术与装备的应用与研究进展[J].中国农机化,2012(1):93-96,103.
[22]郝金魁,张西群,齐新,等.工厂化育苗技术现状与发展对策[J].江苏农业科学,2012,40(1):349-351.
[23]罗昕,胡斌,黄力烁.气吸式穴盘育苗精量播种机的设计与试验[J].农机化研究,2010,32(11):130-132, 140.
[24]夏红梅,李志伟,甄文斌.气力板式蔬菜排种器设计与试验[J].农业机械学报,2010,41(6):56-60.
Abstract ID:1003-188X(2016)08-0214-EA
Design of Fruit and Vegetable Picking Robot Based on Genetic Algorithm and EDA Technology
Xiong Qiong1, Ge Zhen1, Liu Zhigang2
(1.School of Information Engineering,Wuhan Technology and Business University,Wuhan 430200, China; 2.Nanchang Institute of Science & Technology,Nanchang 330108, China)
Abstract:In order to improve the fruit picking robot obstacle avoidance and path planning capabilities, intelligent robot and lightweight design, the embedded system is introduced into the fruit and vegetable picking robot's control system, and the control system are encapsulated using EDA technology, embedded robot path planning genetic algorithm. The fruit and vegetable picking robot manipulator was improved and the manipulator structure design to realize picking robot end effect or obstacle avoidance function and using genetic algorithm intelligent control design and implementation of the complex environment in the path search function. For fruit picking robot performance were tested and found by testing, the obstacle recognition rate is as high as more than 99% and the accuracy of path planning is above 95%, which meet the intelligent picking robot design requirements, modern picking robot design provides a reference value.
Key words:picking robot; genetic algorithm; embedded system; execution end
中图分类号:S225.93;TP24
文献标识码:A
文章编号:1003-188X(2016)08-0214-04
作者简介:熊琼(1981-),女,湖北鄂州人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:湖北省自然科学基金项目(2014CFC1079);武汉工商学院科学研究项目(A2015005)
收稿日期:2015-07-14
