光电跟踪设备视景仿真系统设计
2016-03-22李正炜王建立王斌
李正炜 王建立 王斌

摘 要:由于受环境天气及训练成本影响,操作手只能在光电跟踪设备上进行有限的训练。运用MFC和Vega Prime设计了光电跟踪设备视景仿真系统,通过对视景仿真系统的操作可满足操作手的训练需求。根据背景环境设置,系统视场大小,目标模型等,利用Vega Prime进行场景仿真渲染。仿真系统视窗指向由人机交互设备进行控制,通过控制设备使运动目标保持在视场中央,模拟实际手动跟踪目标过程。此系统可通过仿真不同目标运动轨迹和不同环境,对操作手进行训练,提高操作手技能。
关键词:Vega Prime;仿真系统;光电跟踪设备;MFC;模拟训练
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)02-0181-03
Academy of Sciences,Beijing 100049, China)
Abstract: Due to the impact of weather and training costs, the training on the optoelectronic tracking equipment is limited for operators. Utilize MFC and Vega Prime to design a visual simulation system of optoelectronic tracking equipment, which may meet the training needs for operators. Vega Prime generates the scene according to the background environment settings, the field of system size and target model. The pointing of simulation system window is controlled by the human-computer interaction device. Through the device, operators maintain the moving target at the central visual field as an actual process of manually tracking target. This system can simulate different movement targets and environment for operators to improve their skills.
Key words: Vega Prime; Simulation System; Optoelectronic Tracking Equipment; MFC; Simulation training
1 概述
在实际测量任务中,所用的导弹和靶机成本较高,如果由于操作手失误造成测量任务失败,可能导致整个测试的失败,这将导致很大的损失。所以需要对操作手进行有针对性的训练,提高其操作技能,以确保能胜利完成测量任务,但采用信号弹或靶机进行训练的话,会产生较大的训练成本。通过视景仿真技术对实际观测环境进行仿真,通过人机交互设备模拟操作对设备的控制,实现对操作手的训练。
采用MFC中的基于单文档/视图结构的应用程序框架实现Vega Prime视景仿真程序的开发。仿真模拟软件可以根据需要随时改变仿真场景设置和目标飞行轨迹设置,根据对人机交互输入的视轴信息,实时更新模拟视景窗口指向,模拟实际跟踪过程。
2 Vega Prime介绍
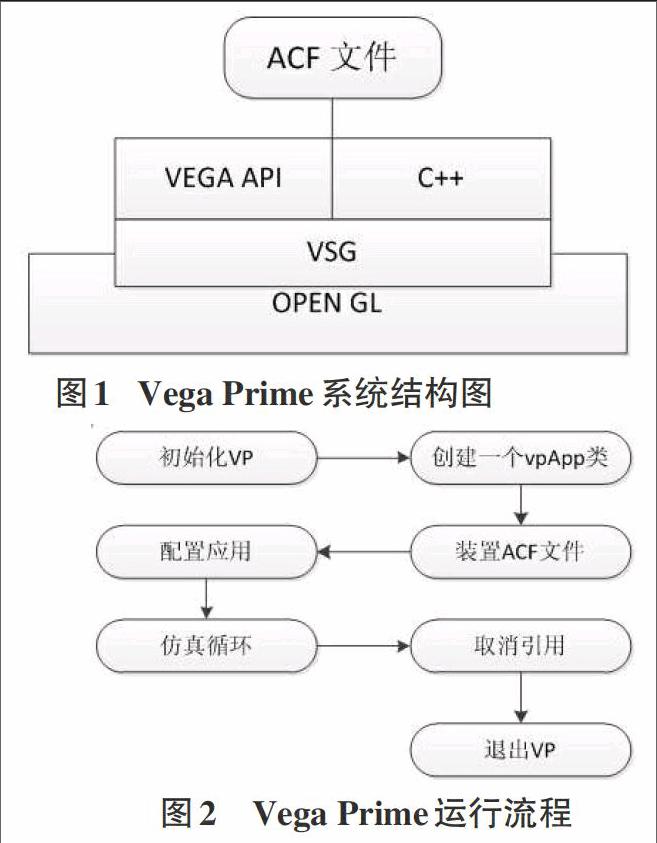
Vega Prime是Multigen-Paradigm公司推出的实时三维虚拟现实开发工具,支持面向对象技术,其底层是基于开放式OpenGL技术具有良好的跨平台性[1-5],通过Lynx Prime GUI图形化工具可以进行快速配置,简单易用让用户可以快速准确地开发出适合要求的视景仿真应用程序,是实景仿真软件平台的主流工具[6-7]。
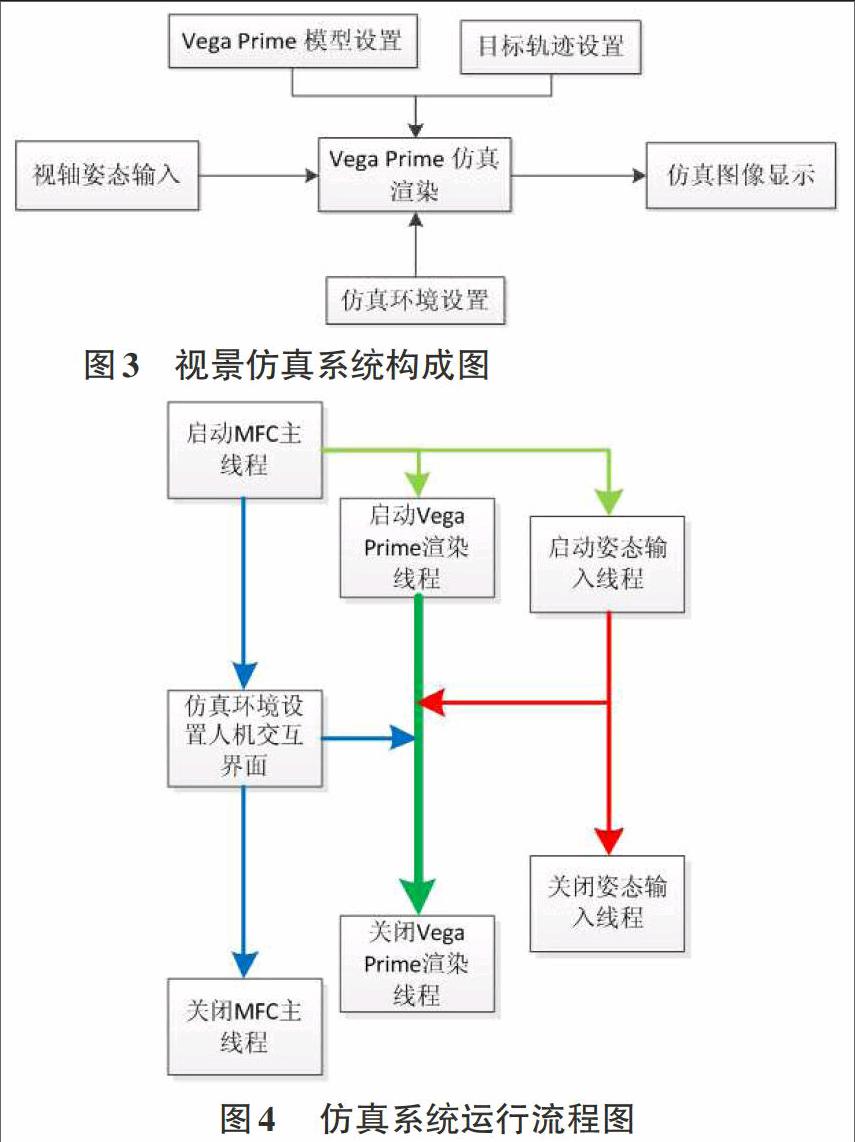
仿真系统采用基于单文档/视图结构的MFC面向对象应用程序框架进行开发[8]。为实现仿真程序具有实时的人机交互性,程序采用多线程模式,包含的线程有视轴姿态输入线程、Vega Prime渲染线程、MFC主线程,程序运行流程图如图4所示。
视窗指向控制,先用Creator创建一个很小点目标作为视轴目标,在LynX配置文件中创建视轴目标Object,在显示场景中可以忽略它的存在,将它作为Vega Prime目标观察物,视轴目标始终处于视窗中心,通过改变视轴目标位置进而实现视窗指向改变。
视轴姿态输入,由人机交互设备输入视轴控制信息,实验所采用的输入设备是键盘,通过上下键控制视轴的俯仰角变化,左右键控制视轴的方位角变化。在Vega prime仿真渲染线程中对输入事件响应,根据事件类型调整视轴方位俯仰值,转换为视轴目标位置,更新视轴目标位置实现视窗控制,输入设备可由其他设备替代键盘,如游戏手柄等。
目标轨迹设置,以观测点中心为原点,载入运动目标轨迹文件将目标轨迹点保存于内存中,在Vega prime进行渲染时根据运动时间提取轨迹点,设置目标位置。目标姿态,根据前后两次位置变化方向进行实时更新,才能获得较好的视觉效果。
仿真环境设置,可以设置背景云量,模拟晴天与阴天,对场景加入噪声、抖动、模糊等效果实现对真实成像过程仿真,可以通过Vega Prime API函数进行实时调整。
相机效果仿真设置,在Lynx配置文件中,添加vpCamera和vpCameraCompositeEffect两项,前者为相机后者为相机效果设置,该类可以仿真平台的抖动,模糊,乘法固定模式噪声,随机噪声等效果。
3.1运动目标轨迹设置
目标运动轨迹坐标均以观测点为坐标中心,仿真系统可以进行3种模式运动目标轨迹设置,分别为变速运动轨迹、等效正弦运动轨迹,直接载入包含时间和目标位置的理论目标轨迹。
3.1.1变速目标轨迹设置
设定目标方位角运动角速度、角加速度,俯仰角运动角速度、角加速度。
进行模拟训练时,首先通过人机交互界面设定目标运动轨迹参数,设定键盘左右键控制量变化大小,天气情况设定及相机效果设定,更新视轴方向使目标处于视场中心。然后启动目标仿真,目标开始沿设定的轨迹运动,此时通过操作控制视窗指向的“上、下、左、右”键改变视窗指向,使目标保持在十字丝中心。或设定目标从各个方向飞入视场场景,演练操作手的反应和操作速度。通过模拟各种运动目标和不同场景,对操作手进行训练。记录目标方位俯仰与视轴的方位俯仰差值,即目标脱靶量,通过对目标脱靶量统计情况来衡量操作手的技能水平。
5结论
结合Vega Prime和MFC实现对光电跟踪设备视景仿真系统的开发,介绍了视景仿真系统结构和软件运行流程,阐述了运动目标轨迹设置方法和运动过程中目标姿态更新方法。MFC通过调用Vega Prime API实时对Vega Prime仿真场景进行改变。通过相机仿真效果和天气背景条件设置,实现对真实场景的仿真。跟踪目标可以加载变速运动轨迹、正弦运动轨迹或直接载入真实目标运动轨迹,使操纵手在接近真实情况下得到训练,提高操作技能,降低训练成本。
参考文献:
[1]熊帅,付承毓,唐涛,等.光电经纬仪实时可视化仿真系统[J].光电工程,2012,9(39):49-55.
[2]牛铁.基于Vega Prime的实时三维视景仿真技术的研究[D].乌鲁木齐:新疆大学,2010.
[3]徐晓东.基于VEGA PRIME的无人机飞行视景仿真系统的研究[J].电脑知识与技术.2007.
[4]李威,杨峰,程咏梅,等.Vega Prime结合OpenGL的导弹尾焰实时模拟[J].计算机工程与应用,2012,48(29):220-224.
[5]唐凯,康凤举,褚彦军.Vega 中云的仿真方法[J].系统仿真学报,2005,17(9):2051-2053.
[6]王乘,李利军,周均清.vega 实时三维视景仿真技术[M].武汉:华中科技大学出版社,2005.
[7]王明印,韦群,徐恩. 基于Creator/Vega Prime的大场景虚拟现实关键技术研究[J]系统仿真学报,2009,21(1):117-120.
[8]张乐,韩佳盈,张蛟. MFC 框架下的Vega Prime 三维视景程序开发技术[J].火力与指挥控制2014,3(39):159-162.
