基于MSP430的运输机器人的设计
2016-03-22刘欢邓婷
刘欢 邓婷


摘要:本文设计一款基于MSP430单片机的小型货运机器人。小型货运机器人以msp430为控制核心,L298N为核心的驱动电路,减速电机为动力。具有自动寻迹,遥控行驶,声光报警,避障的功能。可应用于机场行李运输,仓库货物转运。由于体积小,载重大,又可以在比较复杂的场地中运行,对手推车等传统工具有一定的替代能力。
关键词:msp430;遥控;寻迹机器人;驱动电路
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)02-0156-02
Abstract:In this paper, we design a small cargo robot based on MSP430 mcu. Small cargo robot with MSP430 as the control core, L298N as the core of the driving circuit, the motor speed as the driving force. With automatic tracking, remote control, sound and light alarm, obstacle avoidance function. Can be applied to the airport baggage transport, warehouse cargo transport. Due to the small size, large load, and can run in more complex venues, the opponent's trolley and other traditional tools have a certain alternative.
Key words: MSP430; Wireless remote control; Tracing Robot; Drive circuit
物流行业的发展,促进了载运工具的智能化过程,在货物的周转和储运过程中,大批智能化的机械设备已广泛应用于车站、港口、机场、工厂、仓库等,极大地降低了人们的劳动强度。但是,很少有廉价简易智能工具来替代工人肩扛手抬。手推车和平板车依然是主力军。这些设备无论是速度还是效率上,都限制了货物的运输效率。
基于此,本文设计一款小型货运机器人,以msp430为控制核心,L298N为核心的驱动电路,减速电机为动力具有自动寻迹,声光报警,避障的功能。另外设计中配件尽量采用电动车配件,使得维护起来较为方便。
1 硬件设计
1.1 框图设计
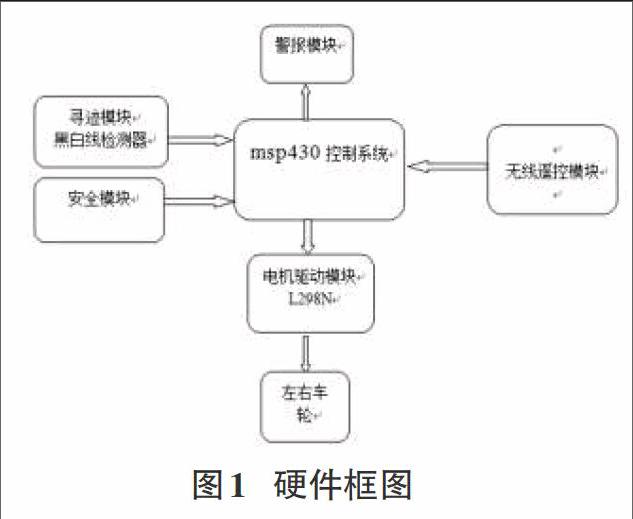
本设计的硬件框图如图1所示。
主要包括主控模块、寻迹模块、无线遥控模块、安全模块、电机驱动模块、报警模块等。
1.2 单元模块设计
1.2.1无线接收模块
无线接收模块电路原理图如图2所示。采用LC振荡电路,内含放大整形,输出的数据信号为解码后的高电平信号,使用极为方便,并且价格低廉,所以被广泛使用。带四路解码输出(同时也可改为六路点动或互锁输出),使用方便;频点调试容易,供货周期短;产品质量一致性好,性价比高。
接收模块有较宽的接收带宽,一般为±10MHz,出厂时一般调在315MHz或433.92MHZ,接收模块一般采用DC5V供电。
1.2.2避障及报警模块
小车提示模块使用了蜂鸣器,当单片机判断到站台就控制蜂鸣器发出声音。
1.2.3 电机驱动模块
L298N是专用驱动集成电路,属于 H桥集成电路,其输出电流为2A,最高电流4A,最高工作电压50V,当驱动直流电机时,可以直接控制实现电机正转与反转,实现此功能只需改变输入端的逻辑电平。为了避免电机对单片机的干扰,本模块加入光耦,进行光电隔离,从而使系统能稳定可靠的工作。 本模块具有体积小,控制方便的特点。 外围电路设计光耦的作用是防止芯片烧毁后大电流流经单片机烧毁单片机,二极管防止减速电机发电产生电流逆流,烧毁芯片。
1.2.4 寻迹模块
图5为本设计的黑白线传感器电路图。图6为实物图。
2 软件设计
根据硬件设计情况,针对性的进行软件设计,主要包括初始化过程、中断查询、小车避障判断、各项运行等,具体的流程图如图7所示。
3 控制与功能实现
3.1自动行走的实现
机器人接受启动指令,单片机采集传感器信号,正常情况下黑白检测传感器AB未检测到黑色轨迹,输出高电平给单片机,单片机通过端口,输出相应电平给驱动电路,间接实现是两台减速电机CD同时正转,实现直线行驶,当机器人行走偏左时,A输出高电平,B输出低电平,此时,单片机控制C正转,D逆转,实现转向;当行驶方向偏右时,A输出低电平,B输出高电平,单片机控制C逆转,D正转,从而纠正行驶方向。前进中遇到AB输出电平全为低时,认为到达停止线,CD同时逆转,实现刹车。
3.2遥控行走的实现
当机器人因意外或者是外界造成机器人对路况无法识别时,我们用手动遥控,控制机器人工作,遥控ABCD,四个按键,分别按下在接收端相应的端口会产生相应的低电平信号传给单片机,单片机接收后选择相应的行走方式,实现前进,后退,转向。
3.3各种安全措施的实现
当机器人左右转时,相应转向灯闪动,蜂鸣器发出滴滴声,提醒前后方人员注意。当红外对管E检测到前方障碍物,输出高电平信号给单片机,单片机控制CD逆转,实现刹车,同时蜂鸣器长鸣,左右转向灯同时闪动,当障碍物解除后机器人继续前进。
当机器人行使至终点线,刹车,停止前进,直至接收到启动指令。
4总结
本文通过软硬件的设计,实现了运输机器人的简单设计,达到了设计目标。
参考文献:
[1] 曾军. 基于C8051F340的超声避障机器人设计[J]. 微计算机信息,2009,29(2):152-154.
[2] 曹玉华. 超声测距系统设计及其在机器人模糊避障中的应用[D]. 青岛:中国海洋大学,2007:22.
[3] 梁毓明,陈德海. 轮式移动机器人调速系统的设计[J]. 江西理工大学学报,2008,29(2):13-16.
[4] 王典洪,孙蒙,黄小辉,等. 基于单片机及传感器的机器人设计与实现[J]. 微计算机信息,2007,3(2):247.
[5] 薛艳茹,郑冰,郝兴贞,等. 基于模糊控制信息融合方法的机器人导航系统[J]. 微计算机息,2005,11(2):107-109.
