电动轮汽车稳定性滑模控制研究
2016-03-21刘秋生徐延海
刘秋生,徐延海,万 涛
(西华大学1.汽车与交通学院;2.汽车测控与安全四川省重点实验室,四川成都610039;3.江铃控股有限公司开发中心,江西南昌330044)
电动轮汽车稳定性滑模控制研究
刘秋生1,2,徐延海1,2,万涛3
(西华大学1.汽车与交通学院;2.汽车测控与安全四川省重点实验室,四川成都610039;3.江铃控股有限公司开发中心,江西南昌330044)
摘要:利用四轮独立驱动(4WID)电动轮汽车各轮驱动电机转矩独立控制且调节迅速的特点,对其稳定性的横摆力矩直接控制问题进行了研究。基于非线性滑模变结构控制理论,设计了分别以车身横摆角速度、质心侧偏角以及两者联合为控制变量的车辆稳定性滑模控制器。并在MATLAB/Simulink平台所建立的非线性整车模型上进行了阶跃转向及单移线2个典型试验工况下的仿真分析。结果表明,设计的3种控制策略均能有效地提高车辆极限行驶的操纵稳定性和主动安全性,其中又以横摆角速度与质心侧偏角为联合控制变量的控制效果最好。
关键词:4WID电动轮汽车;滑模变结构控制理论;横摆力矩控制;操纵稳定性
节能、环保、安全是汽车发展的三大主题,电动汽车作为能够有效缓解能源消耗、环境污染问题受到了越来越多的关注[1-2]。四轮独立驱动电动轮汽车作为未来汽车研究的热点,相比其他形式的汽车拥有无法比拟的优势。因其去除了传统汽车上的变速器、减速器、差速器等机械传动装置,直接通过整车控制器控制各轮毂驱动电机的转矩或转速实现车辆的行驶,不仅简化了整车结构,降低了整车质量,而且还避免了汽车不必要的机械损耗,极大地提高了汽车的工作效率,增加了汽车的续航里程[3]。
车辆稳定性控制最早是在20世纪90年代开始并以ABS为基础发展起来的,它主要在大侧向加速度、大侧偏角的极限工况下工作,利用左右两侧制动力的差值产生横摆力偶矩来防止出现难以控制的侧滑甩尾现象,是一项具有良好操纵性和稳定性的新型主动安全控制系统[4]。传统车辆基本采用效率单轮或侧轮差动制动的方法产生附加横摆力矩;而研究的电动轮汽车与传统车辆在控制上有很大的不同,它可通过控制效率单轮或侧轮电机驱动力矩的增减产生横摆力矩,从而控制车辆按预定的行驶轨迹运行[5-6]。
滑模变结构控制作为一种特殊的非线性控制方法,使控制对象与被控系统的参数变化和外部扰动无关;因此非常适合应用于车辆稳定性的控制[7-8]。本文运用滑模控制理论,分别设计以车身横摆角速度、质心侧偏角以及两者联合为控制变量的稳定性滑模控制器,并在车辆典型的试验工况下进行3种控制器的仿真验证。
1 电动轮汽车动力学模型
1.1整车动力学模型
整车动力学模型既要真实反映汽车的动力学特性,又不使系统变得过于复杂,且形象化、简明化的物理模型有利于清晰地分析和验证所设计控制器的有效性;因此,忽略空气阻力、滚动阻力及转向系统的影响,并同时忽略主要偏重于影响汽车行驶平顺性的悬架系统。经简化问题并考虑影响汽车操稳性的主要因素,
本文只分析车体的侧向及横摆运动这2个自由度,如图1所示。
侧向运动动力学方程:

横摆运动动力学方程:

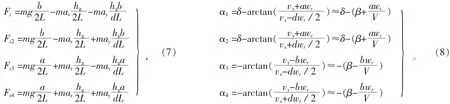
式中:ΣFy,ΣMZ分别为车辆受到的纵向合力、横摆力矩;Fxi,Fyi分别为地面作用于车轮的纵向力、侧向力(i=1,2,3,4);αi为各车轮侧偏角;δ为转向轮转向角;V为汽车行驶车速且V=为汽车的纵向速度、侧向速度;m为整车质量;a,b分别为汽车质心到前轴、后轴的距离;d为前后轮轮距;Iz为整车绕Z轴的转动惯量;wr为横摆角速度;β为质心侧偏角且β=arctan(vy/vx);△M为车辆失稳时系统主动干预的附加横摆力矩,由四驱动车轮通过调节纵向驱动力产生,且它的大小为

其中,驱动车轮的受力方程如式:

式中:Tmdij为电机传递到车轮的驱动转矩;wij为各轮转速;r为车轮滚动半径; Iw为车轮的转动惯量。
1.2轮胎模型
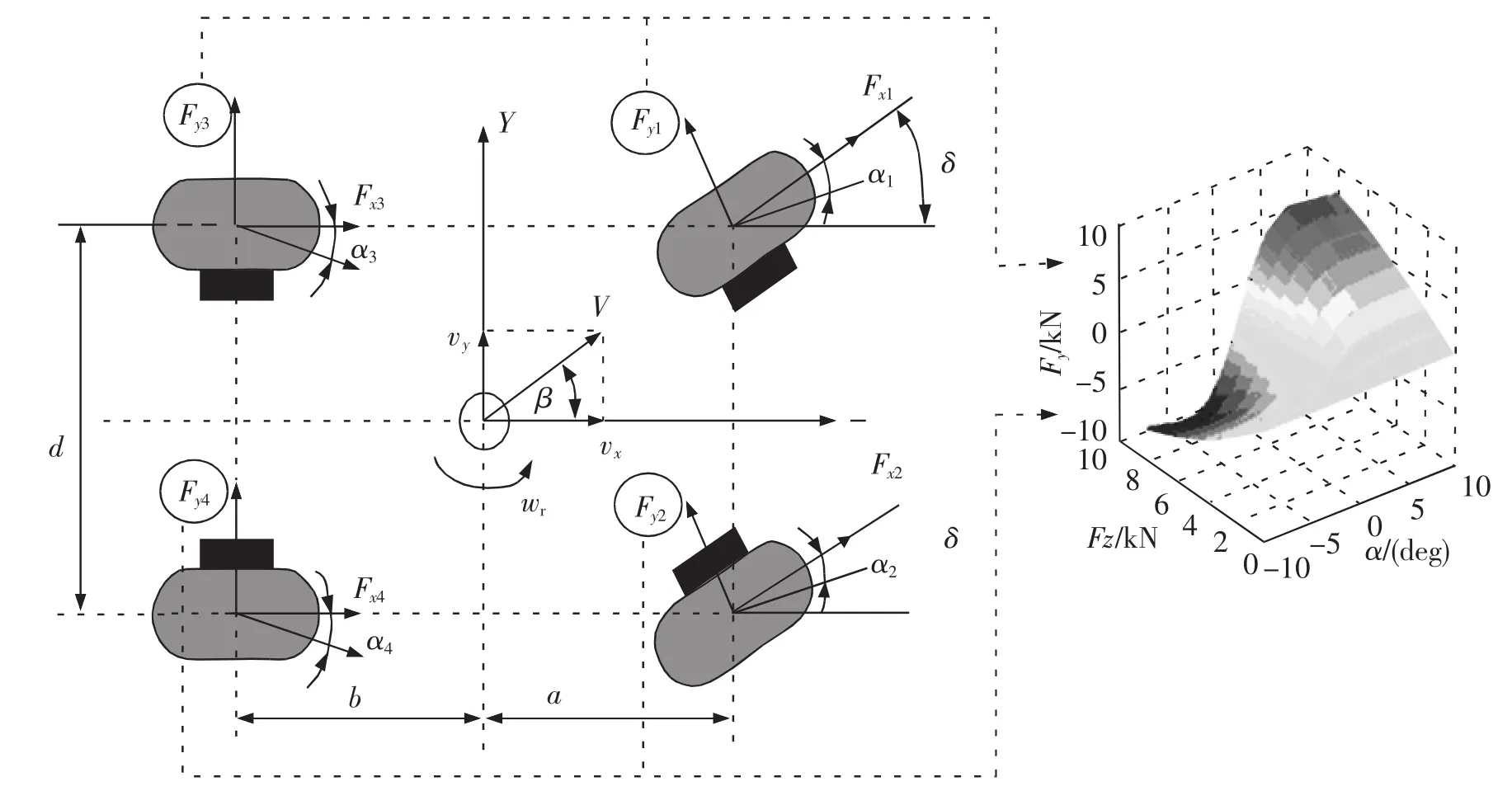
图1 车辆动力学模型及其轮胎特性Fig.1 Vehicle dynamic models and tire characteristics
考虑到“魔术公式”轮胎参数较少,各参数的物理意义明确,并能较好地模拟轮胎在各种工况下的轮胎特性,因此本文选用“魔术公式”轮胎模型进行车辆横摆力矩控制的仿真研究[9]。由于上述整车动力学模型只考虑车体的侧向和横摆运动,同时忽略轮胎回正力矩的影响;因此只需计算纯侧偏工况下车轮的侧向力,其具体表达式如下:

式中:x=α+Sh;α为轮胎侧偏角;Sh为水平漂移;Cy为曲线形状因子;Dy为峰值因子;By为刚度因子;Ey为曲率因子;Svy为垂向漂移,且它们的值都根据车轮载荷确定,具体公式可参考文献[10]。图1给出了通过多次拟合得出所采用轮胎侧向力计算的三维特性图。为计算轮胎侧向力的值,需要先进行轮胎模型辅助模块的计算,比如轮胎载荷以及车轮侧偏角的大小。这里假设车辆只做前轮转向且左右轮转向角相等,从而得车轮载荷及侧偏角的计算公式如下:
其中:ax,ay分别为车辆行驶的纵向、侧向加速度;hg为车身质心高度;L为轴距且L=a+b。
2 滑模控制器的设计
汽车作为一个大的非线性系统,在运行过程中存在轮胎侧偏、载荷转移以及滑移率等复杂非线性因素的问题,采用传统的控制方法很难解决问题。滑模变结构控制作为一种特殊的非线性控制方法,它强迫系统的状态变量沿着人为规定的相轨迹滑动到期望点,可在不同的控制区域里依靠系统运行时的导数值以及状态偏差,对控制量的符号和大小凭借理想开关的方式进行切换,从而在滑动曲线较小的区域里系统能够沿切换线滑动[11]。由于它使控制对象与被控系统的参数变化和外部扰动无关;因此相对其他控制方法有更强的鲁棒性,非常适合应用于汽车稳定性的控制[12-13]。
横摆角速度和质心侧偏角是2个最能反映车辆行驶稳定程度的参数,前者主要侧重车辆稳定性问题的描述,反映车辆行驶中航向角变化过程的快慢,决定车辆的转向特性;后者则侧重车辆轨迹保持问题的描述,反映车辆转向过程中与预定轨迹的偏离程度[14]。所以,使质心侧偏角尽可能地小同时保证横摆角速度较好跟随理想横摆角速度的变化,一直是车辆行驶稳定性控制的目标。由式(9)的线性2自由度车辆模型微分方程,稳态行驶下并考虑转向时侧向加速度受路面附着条件的限制,即ay=wrvx≤μ g,得理想横摆角速度的计算如式(10):
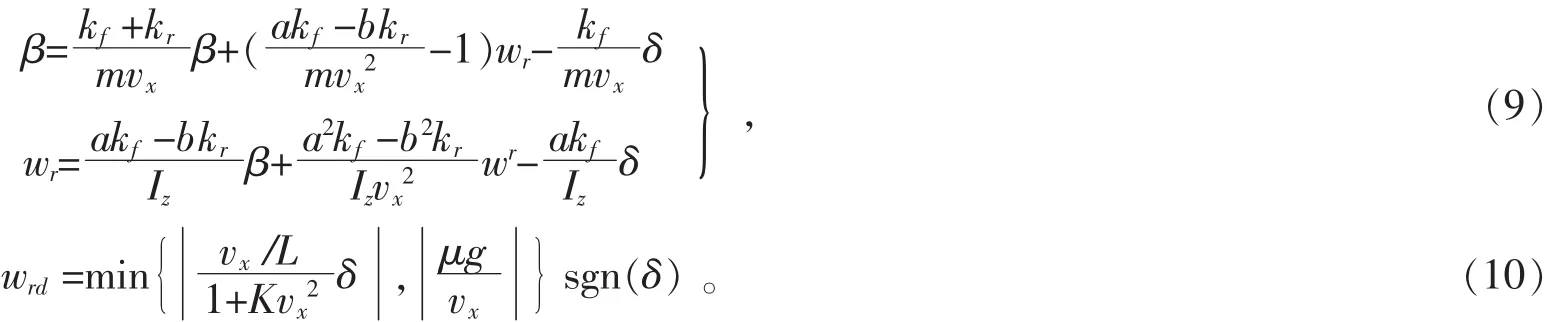
其中,kf,kr分别为前后轮胎的侧偏刚度;K指稳定性因素;本文设定理想质心侧偏角尽可能小,设置为βd= 0。为使车辆的稳定裕度越好,汽车的质心侧偏角响应需趋近于0,对式(9)进行拉普拉斯变换可得到线性二自由度理想模型的传递函数:

式中:Gβ,Tβ,Gwr,Te,P,Q是汽车结构参数及行驶车速的函数关系式,其具体的表达式可详见文献[15]。
2.1质心侧偏角控制
根据上述线性2自由度理想模型的质心侧偏角对前轮转角的响应式(11)改写到滑模面上,得

并由到达条件:S+k1S=0(k1>0),k1为质心侧偏角滑模控制参数,得


结合式(1),(2):


最后将式(15)代入(17)得到以质心侧偏角为控制变量的附加横摆力矩为

2.2横摆角速度控制
同上,根据上述线性2自由度理想模型的横标角速度对前轮转角的响应式(12)改写到滑模面上,得




2.3质心侧偏角和横摆角速度联合控制
从整车动力学的运动方程(1),(2)看出,质心侧偏角和横摆角速度存在某种耦合关系,所以很难通过单独控制其中一个变量而同时很好地控制另一个变量,必须对2个变量进行联合控制,这样可使“单独控制质心侧偏角时不能很好地跟踪理想横摆角速度以及单独控制横摆角速度时质心侧偏角过大”的问题得到很好地解决。由于β觶=(Yfcosδ-Yr)/mV-wr中β与wr的关系,所以可定义两变量联合控制的滑模面为

其中:a,c为联合控制参数,可通过调节其大小得到控制策略的倾向。同样由到达条件:S+k3S=0(k3>0),k3为横摆角速度滑模控制参数,得:a β咬+(c+ak3)β觶+ck3β=0,即

将式(21)代入式(17),即可得到以横摆角速度为控制变量的附加横摆力矩为

3 仿真与分析
将式(24)代入式(17)中,即可得到以两变量进行联合控制时的附加横摆力矩为
为验证所设计的3种横摆力矩滑模控制器的有效性,借助MATLAB/Simulink动态仿真平台建立的包含“魔术公式”轮胎模型的电动轮汽车非线性模型作为实际控制对象进行仿真分析,其中分析流程示意图如图2。并给出车辆模型的参数如表1。为评价车辆的操纵稳定性和行驶安全性,选取常用于国内外汽车厂商在新车研发试验阶段的车辆最易出现失稳的阶跃转向以及单移线2个典型行驶工况进行仿真验证。
3.1阶跃转向
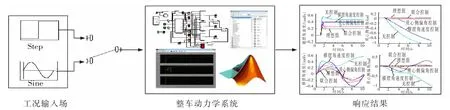
图2 数值模拟仿真分析过程示意图Fig.2 Schematic diagram of numerical simulation analysis

表1 车辆模型部分参数Tab.1 Some parameters of vehicle model
阶跃转向试验工况设定汽车以初始车速V=100 km·h-1在路面附着系数为μ=0.8的条件下运行,行驶1 s后给前轮输入阶跃幅值为5°的前轮转角,该试验工况能较好地评价汽车的瞬态转向特性。从图3,4,5中评价参数响应曲线可清楚看出各种控制方法的优劣性,显然车辆在无控制时质心侧偏角及侧向加速度变化剧烈,表明车辆在短时间内已经出现明显的严重失稳现象。通过施加控制后,车辆的运动状态得到明显改善,稳定性增强。从图3~图5可以看出采用横摆角速度控制时虽然能将横摆角速度很好地控制在0.33 rad的稳态范围内,但质心侧偏角和侧向加速度却出现很大的波动,说明采用横摆角速度控制后效果不太理想。而采用质心侧偏角控制时车身质心侧偏角得到了很好控制,并接近理想值0 rad,而且横摆角速度在经过短暂的波动也很快达到稳态值0.22 rad,并接近理想值0.19 rad,侧向加速度也得到稳定,说明此控制方法效果较好并明显优于横摆角速度控制。显然以两者联合为控制变量的效果最好,横摆角速度和质心侧偏角都能很快进入稳态,且无超调并最接近理想值,侧向加速度也得到了最好的控制,此时车辆行驶最稳定。
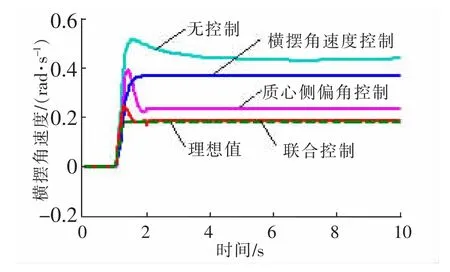
图3 横摆角速度响应曲线对比Fig.3 Response curve comparison of yaw rate
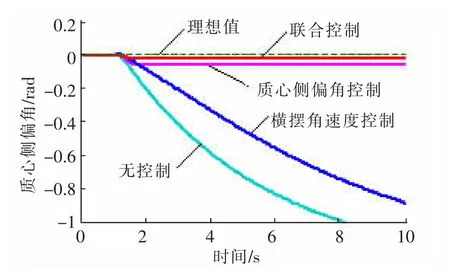
图4 质心侧偏角响应曲线对比Fig.4 Response curve comparison of sideslip angle
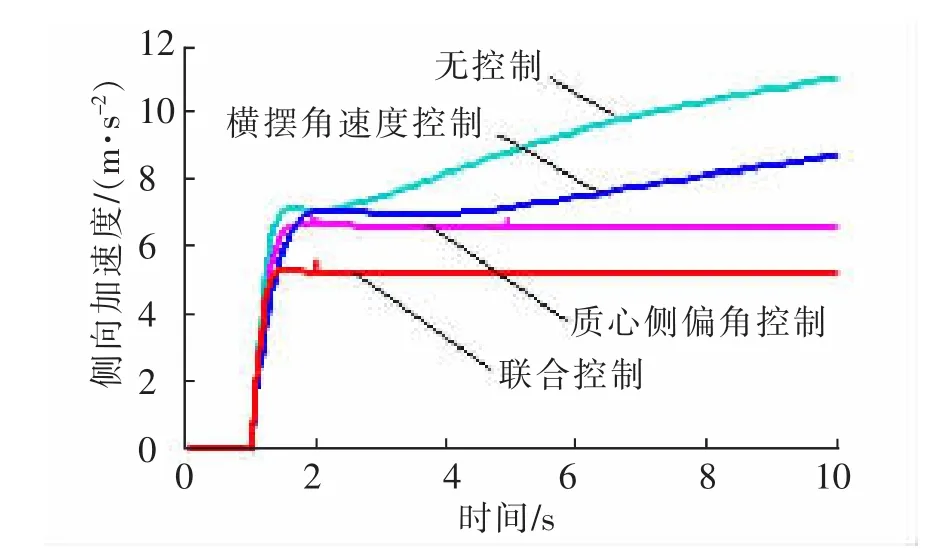
图5 侧向加速度响应曲线对比(阶跃转向)Fig.5 Response curve comparison of lateral acceleration
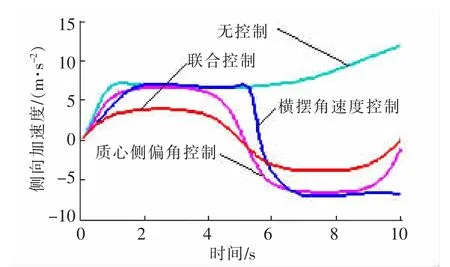
图6 侧向加速度响应曲线对比(移线工况)Fig.6 Response curve comparison of lateral acceleration
3.2单移线工况
单移线试验工况同样设定汽车以初始车速V=100 km·h-1在路面附着系数为μ=0.8的条件下运行,并同时给前轮输入正弦波幅值为5°、频率为π/5的前轮转角,移线工况主要反映汽车紧急躲避障碍及换道的能力。
图6、图7及图8同样给出了在移线工况下的侧向加速度、横摆角速度和质心侧偏角这3个最能评价车辆操稳性的响应曲线对比。同阶跃转向工况一样,无控制车辆失稳严重并出现侧滑,而采取控制后各项参数均能很好地跟随转向输入的变化而变化,稳定性明显增强。从图6~图8可看出采用横摆角速度控制除了能够将车身横摆角速度得到稳定控制外,其他如质心侧偏角及侧向加速度均控制不太理想。而采用质心侧偏角控制则效果明显,不仅质心侧偏角幅值控制到0.03 rad并接近设定的理想值0 rad,而且将横摆角速度及侧向加速度也控制到了稳态的范围之内。同样地,采用两者联合为控制变量的控制效果最好,都能很好将各项参数控制在理想值附近,车辆行驶处于最稳定状态。
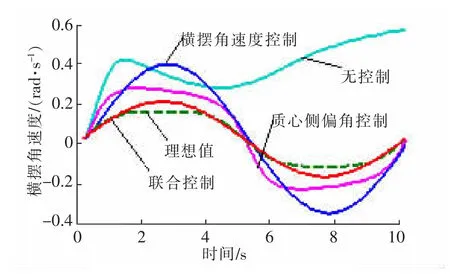
图7 横摆角速度响应曲线对比Fig.7 Response curve comparison of yaw rate
4 结论
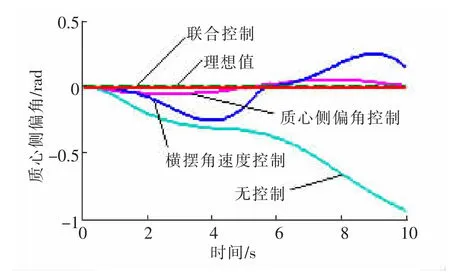
图8 质心侧偏角响应曲线对比Fig.8 Response curve comparison of sideslip angle
1)以线性二自由度理想模型为基础,分别设计了以车身横摆角速度、质心侧偏角及两者联合为控制变量的车辆稳定性滑模控制器,并在MATLAB/Simulink动态仿真平台所建立的非线性整车模型上进行了阶跃转向及单移线2个典型试验工况下的仿真验证。
2)经过2个汽车典型试验工况的仿真分析,结果表明:设计的3种控制器均能不同程度地提高车辆行驶的操纵稳定性及主动安全性,同时以横摆角速度和质心侧偏角联合为控制变量的方法效果最好,它能最好地跟随车辆的理想横摆角速度并能将质心侧偏角控制到最小。
参考文献:
[1]褚文强,辜承林.电动车用轮毂电机研究现状与发展趋势[J].电机与控制应用,2007,34(4):1-5.
[2]宋志成,王勋,伦利,等.基于收益最大化的电动汽车充电站选址规划[J].华东交通大学学报,2014,31(1):50-55.
[3]柴健,李旭宇,陈刚,等.四轮独立驱动轮毂式电动汽车转向控制策略研究[J].公路与汽运,2014,164:1-5.
[4]罗俊,陶健民.车辆稳定性的滑模变结构控制研究[J].湖北汽车工业学院学报,2005,19(3):17-21.
[5]张金柱,张洪田,孙远涛.电动汽车稳定性的横摆力矩控制[J].电机与控制学报,2012,16(6):75-80.
[6]刘秋生,徐延海,陈启,等. 4WID轮毂电机式电动汽车横摆性滑模控制研究[J].广西大学学报:自然科学版,2015,40(5):1080-1091.
[7]张聪,王振臣,程菊,等. 4WIS-4WID车辆横摆稳定性AFS+ARS+DYC滑模控制[J].汽车工程,2014,36(3):304-310.
[8]杨康,王振臣,赵莎.基于滑模变结构控制的车辆稳定性研究[J].现代制造工程,2014(10):53-59.
[9]林程,彭春雷,曹万科.独立驱动电动汽车稳定性的滑模变结构控制[J].汽车工程,2015,37(2):132-138.
[10]郑香美,高兴旺,赵志忠.基于“魔术公式”的轮胎动力学仿真分析[J].机械与电子,2012(9):16-20.
[11]王娜.汽车横摆稳定控制的研究[D].柳州:广西科技大学,2013.
[12] GOODARZI A,ESMAILZADEH E. Design of a VDC system for all-wheel independent drive vehicle[J].IEEE/ASME Transactions on Mechatronics,2007,12(6):632-639.
[13]赵艳娥,张建武.基于滑模控制的四轮驱动电动汽车稳定性控制[J].上海交通大学学报,2009,43(10):1526-1530.
[14]夏长高,李心庆,郑恩瑞.主动横摆控制在车辆横向稳定性中的应用研究[J].机械设计与制造,2015(4):35-43.
[15]杨化方.基于滑模变结构控制的电动汽车稳定性控制系统研究[D].淄博:山东理工大学,2009.
(责任编辑刘棉玲)
Study on Sliding Mode Control for Stability of Electric Wheel Vehicle
Liu Qiusheng1,2, Xu Yanhai1,2, Wan Tao3
(1. School of Automobile and Transportation, Xi Hua University, Chengdu 610039; 2. Sichuan Key Laboratory of Automotive Control and Safety, Chengdu 610039; 3. Development Centre of Jiangling Holdings Limited Company, Nanchang 330044, China)
Abstract:By use of independent controllability and quick adjustment of the wheel drive motor torque for 4WID electric-wheel vehicle, this paper studied yaw moment direct control for stability. Based on the nonlinear sliding mode variable structure control theory, three different sliding mode controllers were respectively designed by taking the body yaw rate, the sideslip angle and the combination of the yaw rate and sideslip as the controlled variables. A nonlinear vehicle model in MATLAB / Simulink platform was established for the simulation analysis in two typical test conditions—step steering and single lane. Results showed that the three kinds of control strategies can effectively enhance handling stability and active safety of vehicles in extreme driving conditions. Among the three controllers, the one with both yaw rate and sideslip angle as the control variables achieved the best control effect.
Key words:4WID electric-wheel vehicle; sliding mode control theory; yaw moment control; handling stability
通讯作者:徐延海(1970—),男,教授,博士,研究方向为整车性能测试与仿真。
作者简介:刘秋生(1989—),男,硕士研究生,研究方向为车辆动力学与控制。
基金项目:四川省新能源汽车电控技术创新支撑项目(15203559);西华大学研究生创新项目(ycjj2015034)
收稿日期:2015-06-18
文章编号:1005-0523(2016)01-0114-07
中图分类号:U461.6;TH16
文献标志码:A