无人机编队飞行的自适应控制设计
2016-03-21王建宏熊朝华
王建宏,许 莺,熊朝华
(中国电子科技集团公司第二十八研究所,江苏南京210007)
无人机编队飞行的自适应控制设计
王建宏,许莺,熊朝华
(中国电子科技集团公司第二十八研究所,江苏南京210007)
摘要:无人机在以机群编队飞行的模式下,受编队飞行环境的影响,使得无人机在保持编队队形和协同编队一致性控制问题上存在技术难度。对编队飞行采取自适应控制进行设计,根据编队间距以及长僚机位置姿态信息为编队控制器生成速度和航向角的指令信号。分两种情况进行研究:一类是气动耦合干扰参数未知情况下编队控制律设计,另一类是干扰因素未知情况下的编队控制律设计。通过最基本的构造李雅普诺夫函数,从理论上分析编队飞行间距误差最终收敛于0,编队运动稳定,编队队形可以得到保持;最后用仿真算例验证本文辨识方法的有效性。
关键词:无人机;协同编队;自适应控制
无人机在协同编队飞行的过程中,不仅要考虑到单机飞行时的数据通信,航迹规划,飞行控制等问题,更要解决在多机编队飞行时的队形保持,避障,多机航路规划等问题,其控制难度远高于单机飞行。本文所研究的无人机是一种靶机,其飞行环境空旷,飞行航路已知且事先规划好,本文主要对无人机协同编队中的队形保持问题进行研究。在编队飞行过程中,默认长机按照预先给定的航线进行较为准确的飞行,僚机则根据编队控制器进行编队队形的保持,实现编队协同一致性。队形保持控制器的设计是保证协同编队队形的必要条件。协同编队中各无人机存在气动耦合的影响可以发现对于编队控制器的设计不能局限于常规设计方法,否则将会使得系统计算过于复杂,运行速度减慢。随着编队中无人机数量的增加,这种影响更为明显,编队的整体性能将大大降低。为解决上述问题,本文将会设计一个合理的编队控制器,同时随着作战要求的提高,有些情况下已不再局限于队形的保持,更提出队形变换的新要求。
以长机—僚机的飞行模式为例,研究两架无人机以左斜线编队,带队的那架飞机称作为长机(L),跟在后面的那架飞机称作为僚机(W),其相对运动示意图的二维平面的俯视图在惯性坐标系下如图1所示。对于相对位置关系,则在以僚机速度方向为x轴且固连于僚机的旋转参考坐标系下定义。采用基于气流坐标系的模型建立能够更加实际的描述出无人机在编队中的运动。根据长机和僚机之间的几何关系、相对距离以及长僚机各自的飞行速度(V)、航迹方位角(φ)、位置坐标(x,y)等参量,在僚机的速度坐标系建立水平面上的相对运动模型。可以认为在编队中的所有飞机都有相同的一阶航向保持、一阶马赫数保持、二阶高度保持的自动驾驶仪模型。考虑到飞机的爬升过程,因而高度采用二阶过阻尼环节进行描述。通过编队控制器调节速度、航向、高度三个回路的参考指令信号,来控制无人机的飞行。
在协同编队问题中,编队队形保持是一个主要问题。为实现整个机群以期望姿态并保持个体间恒定距离运动,需要控制每架无人机的速度,航向角等飞行信息,使其趋于一致,并趋于期望的指标。本文解决编队协同控制问题,无人机协同编队控制系统是一个闭环的自主飞行系统。编队飞行控制原理可描述为:编队控制器根据前后两机之间的距离信息以及速度、偏航角之间的误差信息生成僚机的指令控制信号送至僚机,由此解算出当前自身的速度、偏航角等信息。再由编队控制器根据编队运动关系计算出当前两机之间的距离信息,并与期望间距作对比,如此往复实现了编队运动的控制,其原理框图见图2。有较多文献指出编队最优即是编队飞行处于同一水平面,没有高度差,故本文对编队控制的研究也基于此进行。
综上,无人机协同编队飞行的控制原理可归纳为如下过程:
1)长机通过数据通信向僚机实时发送航向角、速度以及队形指令;
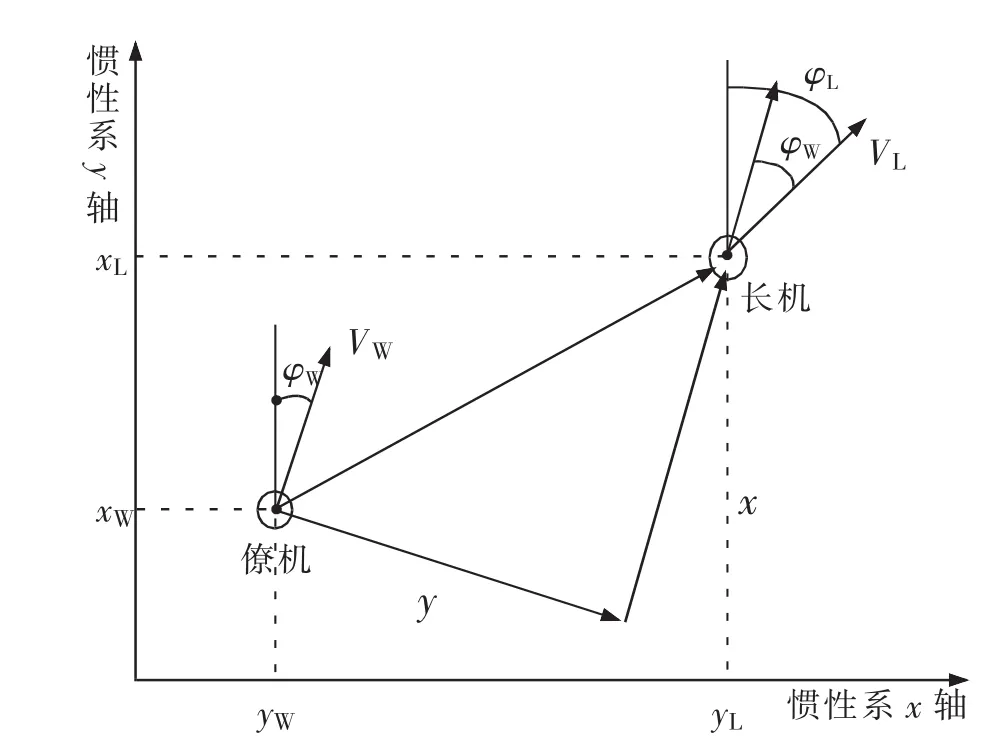
图1 编队飞行相对运动平面俯视图Fig.1 The relative motion plot of formation flight
2)僚机根据长机发来的信息再结合自身的速度和航向角,计算出当前两机之间的距离;
3)僚机根据编队指令间距,结合上一步的计算结果,计算出编队误差信号;
4)根据将长—僚机之间的速度、航向角偏差信号以及编队两机距离的误差信号,通过相应的控制规则,生成僚机的控制指令信号,继而僚机做出相应控制飞行。返回第1步。
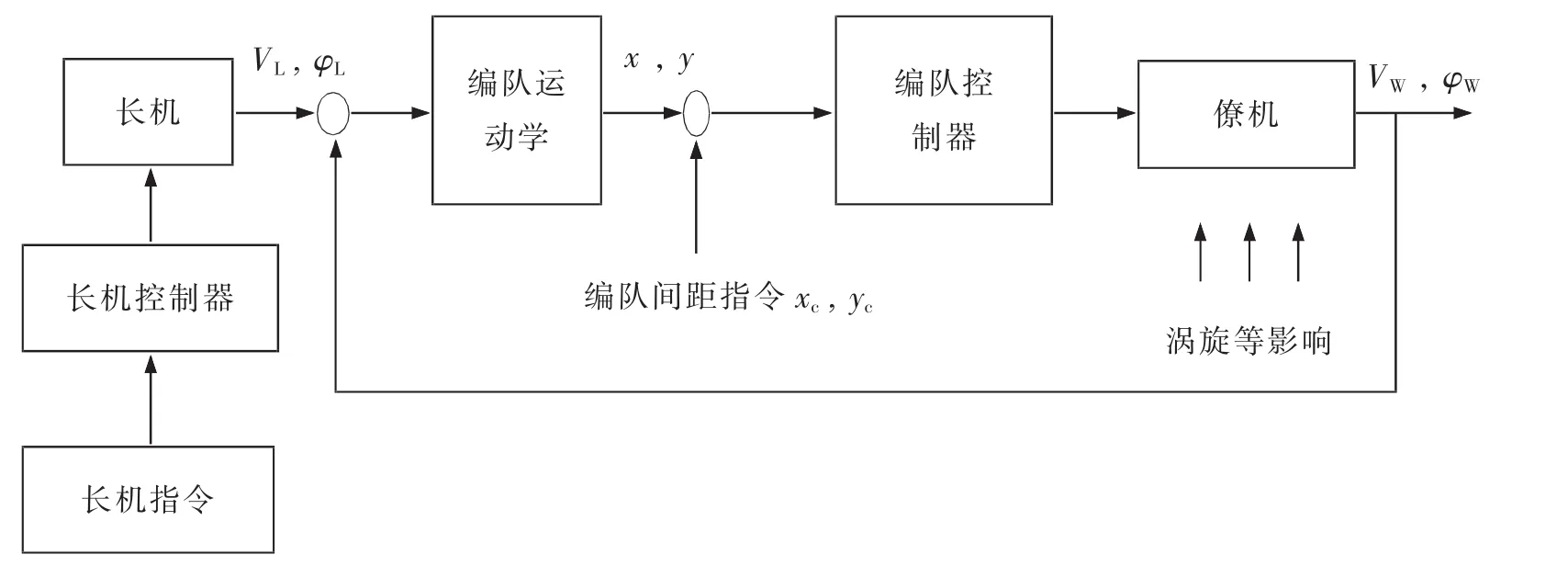
图2 编队控制基本原理图Fig.2 The formation control principle diagram
1 基于自适应控制的编队飞行控制
在实际无人机的协同编队中,小型高速无人机自身建模不准确以及编队飞行过程所受外界未知干扰影响等因素都会影响到编队中每架无人机的飞行特性。目前,常用的无人机编队方法有PID控制、自适应控制、模糊控制、各类仿生控制以及智能控制等。PID控制器实现简单,在工程中得到了广泛使用,但需要整定PID参数,当指令改变时,固定PID参数往往不能取得好的控制效果,需要在线调整,这会增加控制器复杂程度,与使用PID控制器初衷背道而驰。因此就需要加入先进的控制体系,在PID基础上加上参数辨识环节,根据对象的实际状态实时改变PID的3个控制参数。但是这种方法需要对象模型精确。
本文不采用常规的PID控制方法而改为采用自适应控制来实现编队队形保持的控制。主要分为两类来讨论,一类为干扰因素为两机之间的涡流气动耦合模型,其模型参数未知。另一类为干扰因素模型结构未知,但其函数值有界。分别用△fv(·),△fφ(·)来表示外界干扰因素在每架飞机上产生的影响。
2 气动耦合参数未知的编队飞行控制设计
本节讨论第1类情况,考虑外界干扰因素主要为各机之间的涡流气动耦合影响,其中△fv(·),△fφ(·)的模型表达式如式(1),式(2)所示,△CDy、△CYy分别为气动耦合效应中的阻力增量系数导数和侧力增量系数导数。本节研究△CDy,△CYy未知时的编队飞行控制设计。

编队飞行中相邻两机在水平面内的相对运动微分方程组如式(3)所示,对于纵向面内高度的相对关系,由于两机间高度不存在耦合,对水平面内的影响也可以忽略各机单独控制,故此处不予以考虑。

定义xc,yc为期望编队在僚机气流旋转参考坐标系的下间距,x,y为实际编队队形间距,则相邻两机在x,y方向上的编队间距误差为

对式(4)求导得式(5)

可以注意到,从理论上说,在旋转参考坐标系中两机之间的距离x,y并不会为0,而实际协同编队情况下是有可能的。因此将误差e转换到惯性坐标系下,其表达如式(6)


由上式可以得到由式(5),式(6)对惯性坐标系下的间距误差求一阶导数得式(8)

其中矩阵C的表达式为

可知:det(C)=xc。
对惯性坐标系下的间距误差E求二阶导数得式(10)

在式(10)中,令控制输入为飞机的速度指令和航向角指令Vci,φci,其中矩阵D,G的表达式为

其中:gv,gφ分别为速度回路与航向角回路的控制增益。
本节要设计出合适的控制输入u=[Vci,φci],使得在该控制指令的作用下,编队间距的误差能保持为0。对式(10),若函数△fv(·),△fφ(·)有界且满足

其中:参数b为正常数,△c为气动耦合导数的真实值,若控制输入满足式(13),则编队间距趋于0,协同编队飞行稳定。

其中:各参数表达式如下

由式(10)以及(14)综合得

将式(13)带入上式,则有

针对如下的李雅普诺夫函数

李雅普诺夫函数的构造形式很多,式(20)的形式是最经典的形式之一。其中△c軇=△C-△c赞表示气动涡流耦合导数真实值与估计值之差,对李雅普诺夫函数求导有
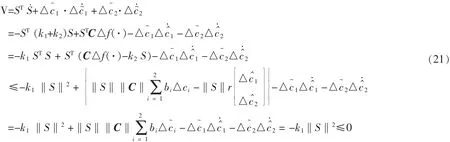
由上式导数小于等于0可以得出,编队间距误差最终趋于0,编队飞行间距最终保持稳定,编队队形能够保持。上述即是在考虑涡流气动耦合情况下为小型高速无人机协同编队队形保持设计自适应控制器。
3 干扰模型结构未知的编队飞行控制设计
本节讨论第二类情况,外界干扰因素模型结构均为未知。在实际编队飞行中,对小型高速无人机的干扰因素除了各机之间的涡流影响外,还有很多不可建模定性分析的干扰,在这种情况下,用第一类情况来设计控制器较为不妥当。此处认为编队处于同一水平面,各架无人机高度单独控制。做如下假设:△fv(·),△fφ(·)为未知函数,但其均是有界函数,满足

式中:△fvN,△fφN是干扰函数的标称值。根据误差E的二阶导数方程式(10),取

根据式(10)可以得到

其中:k1,k2是大于0的常数,设计控制输入u使得误差E趋于0,即可满足本节要求。由式(9),式(12)可得到

由式(24)可知det(CG)=gvgφxc。易知参数gv,gφ,xc均为非0的数,故而(CG)-1存在,控制量u是存在的,但是
其中含有不确定量,故采用△fv(·),△fφ(·)的估计值△f赞v(·),△f赞φ(·)来替代,控制输入为

由式(25)和式(10)得出关于误差E的另一种表达形式

其中:

若误差E=[E E觶]T能够趋于0,则编队控制就能稳定,编队队形既能保持。设正定对称矩阵P、Q,P是李雅普诺夫方程ATP+PA=-Q的解,若△赞v(·),△赞φ(·)满足下式,则有E→0,E→0。

其中:
取李雅普诺夫函数如下式(29),对其求导得式(30)


由此可以得出,E→0,E→0,即编队飞行间距误差最终收敛于0,编队运动稳定,编队队形可以得到保持。
4 仿真与分析
1)本节对上文的自适应编队控制进行仿真。仿真共有3架无人机,包含一架长机,两架僚机,仿真共进行160 s。3架飞机的初始状态(包括水平位置(xi,yi),水平速度Vi,航向角φi)如表1所示。人为设定长机的飞行状态分为三个阶段:第一阶段,从仿真开始到80 s,长机处于匀速直线平飞状态,其航向角初始状态为0;第二阶段,从80 s到96 s,长机以匀角速度偏转-10度,但飞行速度不变;第三阶段,从96 s到仿真结束,长机继续处于匀速直线平飞状态,但与第一阶段相比,航向不同。第一阶段主要考察机群是否可形成稳定编队,第二阶段考察在复杂长机状态下,僚机是否可以实时跟随,队形是否可以保持,第三阶段主要观察,在第二阶段编队破坏的情况下,是否可再次形成稳定编队。编队指令间距取最优紧密编队位置。图3为编队仿真曲线,其中实线表示长机(1号无人机),虚线均为僚机(2、3号无人机),图3(a)为无人机飞行轨迹的俯视图,图3(b)为无人机的水平速度变化曲线,图3(c)为航向角的变化曲线。
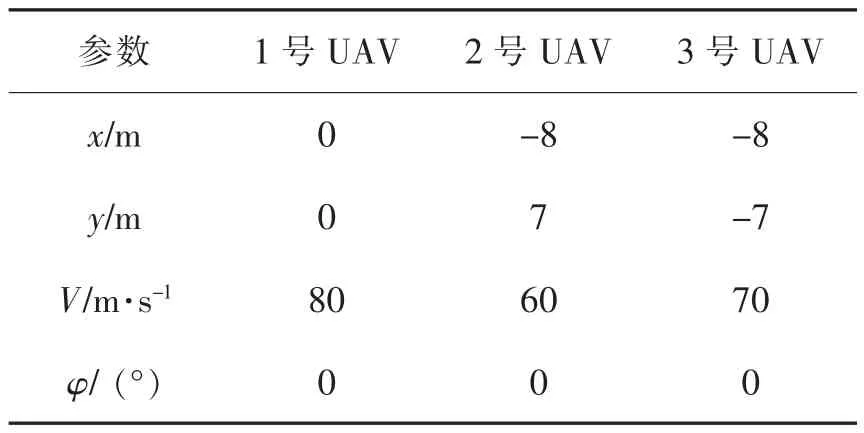
表1 编队飞机初始状态Tab.1 The initial state of formation UAVs
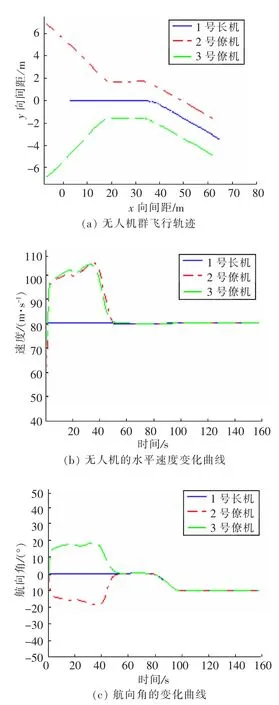
图3 编队仿真曲线Fig.3 The formation simulation curve
由上图3可以看出,该方法可以形成稳定编队,且长机状态改变时,能实时跟随长机的动态变化进而保持队形。首先,从形成编队的时间上,速度变化大约在50 s时进入稳定达到与长机一致,航向角变化大约在50 s时进入平衡态。其次,在形成编队的稳定程度上,速度、航向角曲线变化平滑,稳定波动小。形成的编队队形能稳定在编队期望间距上,在长机航向角改变时也能保持队形进行编队飞行。
2)本节对上文的干扰因素未知但函数值有界的自适应编队控制进行仿真。仿真情形是相同。图4为编队仿真曲线,其中实线表示长机(1号无人机),虚线均为僚机(2、3号无人机),图4(a)为无人机飞行轨迹的俯视图,图4(b)为无人机的水平速度变化曲线,图4(c)为航向角的变化曲线。由图中可以看出,该情况下也可以形成稳定编队,且长机状态改变时,能实时跟随长机的动态变化进而保持队形。首先,从形成编队的时间上,速度变化大约在60 s时进入稳定达到与长机一致,航向角变化大约在60 s时进入平衡态。其次,在形成编队的稳定程度上,速度、航向角曲线在形成编队的前60 s波动较图2的仿真曲线波动幅度大,曲线不够光滑,有毛刺。在形成编队后则曲线趋于平滑,随着长机状态的改变能实时跟随,形成稳定编队。
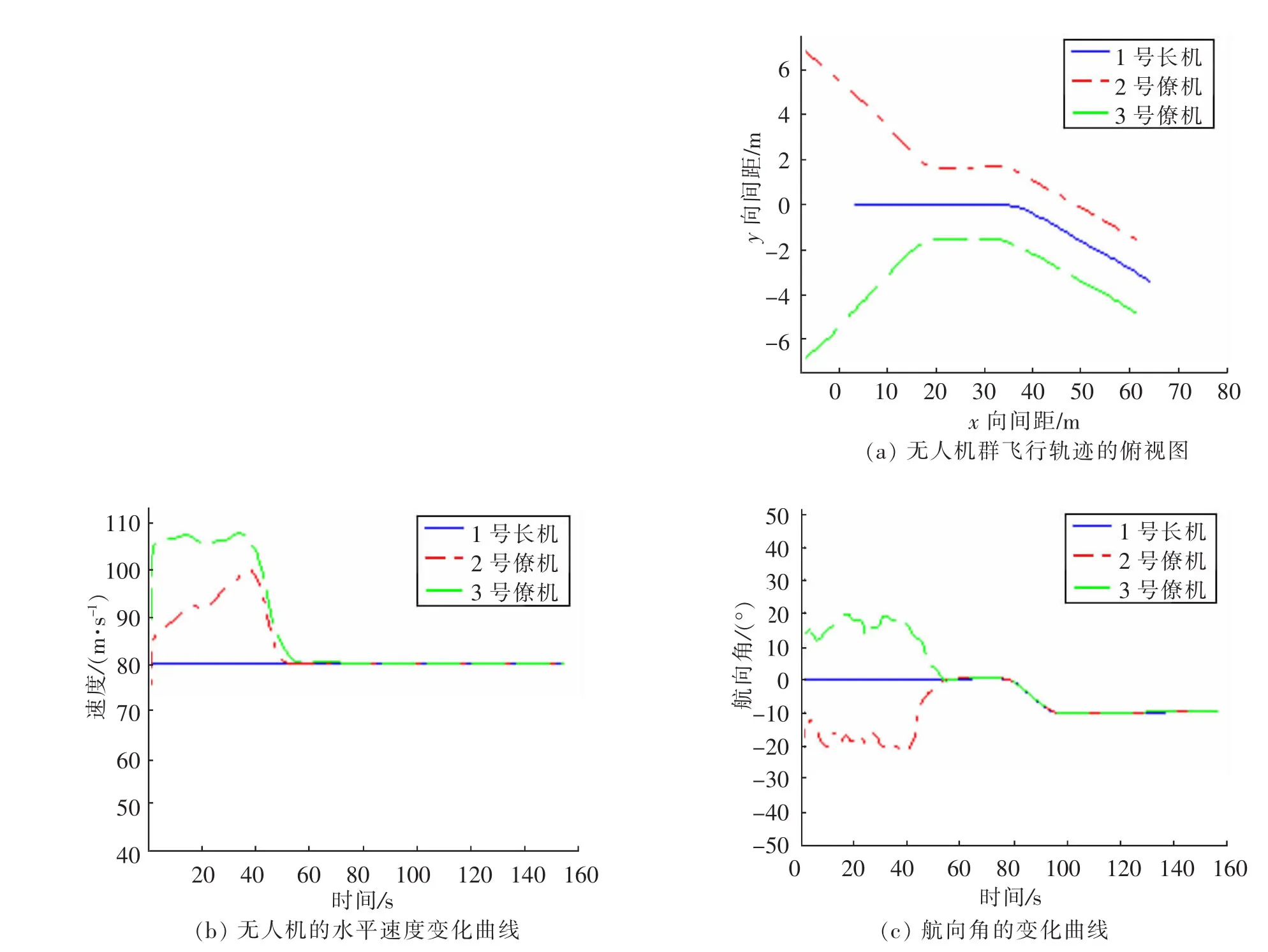
图4 编队仿真曲线Fig.4 The formation simulation curve
5 结语
本文探讨无人机协同编队控制问题。首先阐述编队飞行控制的基本原理,研究基于自适应控制的无人机编队控制设计。在干扰因素为涡流耦合影响,模型已知但参数未知和干扰因素未知,但函数值有界两种情况下设计无人机协同编队控制。仿真表明两类型均能保证编队队形保持,但第二种情况不确定因素更大,稳定性、快速性等性能较第一种稍差,形成稳定编队时间长。
参考文献:
[1] CHANDOLA V. Anomaly detection: a survey[J]. ACM Comput Surv,2009,41(15):1-58.
[2] DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[3] BRASLAVSKY J H. Minimum variance control over a Gaussian communication channel[J]. IEEE Transactions on Automatic Control,2011,56(8):744-756.
[4] GUPTA V,SPANOS D. Optimal LQG control across a packet dropping link[J]. Systems and Control Letters,2007,56(6):439-446.
[5] IMER O C,YUKSEL S. Optimal control of dynamical systems over unreliable communication links [J]. Automatica,2006,42(9):1429-1440.
[6] KEYOU YOU, MINYUE FU. Mean square stability for kalman filtering with markovian packet losses[J]. Automatica,2011,47(12): 2647-2657.
[7] SILVA E I, GOODWIN G C. Control system design subject to SNR constraints[J]. Automatica,2010,46(2):299-310.
[8] POLYANSKIY Y,H V POOR. Channel coding rate in the finite blocklength regime[J]. IEEE Transactions on Information Theory,2010,56(5):2307-2359.
[9] BERSTEKAS D P,TSITSIKLIS J N. Parallel and distributed computation: numerical methods[M]. Athema Scientific,1997.
[10] BOYD S,VANDENBERGHE L. Convex optimization[M]. Cambridge University Press,2004.
[11] BOYD S,PARIK N. Distributed optimization and statistical learning via the alternating direction method of multipliers[J]. Foundations and Trends in Machine Learning,2011,16(3):511-516.
[12] CANDES E J. Robust uncertainty principles: exact signal reconstruction from highly in complete frequency information [J]. IEEE Transaction on Information Theory,2006,52(4):489-509.
(责任编辑姜红贵)
Adaptive Control Design in UAV Formation Flight
Wang Jianhong, Xu Ying, Xiong Zhaohua
(The 28th Research Institute of China Electronics Technology Group Corporation, Nanjing 210007, China)
Abstract:Under the UAV formation flight mode, there would be difficulty in consistency control of keeping and coordinating formation due to the restricted formation flight environment. This paper applies the adaptive control strategy to design the formation flying and generate the speed or heading angle command signal of the controller based on the formation distance and long wingman position and attitude information. It studies two cases: formation control law design with the aerodynamic coupling interference parameters unknown; formation control law design with confounding factors unknown. From the theoretical analysis, it finds out that the formation flying distance error eventually converges to 0 and formation movement stability or formation flying can be maintained by using the basic Lyapunov function structure. The simulation example is then used to prove the efficiency of this parallel distribution algorithm.
Key words:unmanned aerial vehicle; cooperative formation flight; adaptive control
作者简介:王建宏(1980—)男,副教授,博士后,研究方向为系统辨识与自适应控制。
基金项目:国家863计划项目(2012SYAB321)
收稿日期:2015-04-12
中图分类号:V249.12;TP273
文献标志码:A
文章编号:1005-0523(2016)01-0001-08