“十二五”中国空间探测活动回顾
2016-03-17诸葛汇
“十二五”中国空间探测活动回顾
The 12th Five-year Plan in Review: China's Space Exploration Activities

“十二五”期间,我国空间探测活动取得了突出成就。嫦娥-2绕月探测器开展了多项拓展试验,包括探测了图塔蒂斯(Toutatis)小行星;嫦娥-3落月探测器首次实现了我国对地球以外天体的软着陆,使我国成为世界上第三个掌握落月探测技术的国家,同时进行了就位探测和巡视探测,工程和科学成果双丰收;探月工程三期再入返回飞行试验器(简称试验器)的返回器顺利着陆,表明我国已全面突破和掌握航天器以接近第二宇宙速度的高速再入返回关键技术,其服务舱进行了多项重要的拓展试验。
1 2011年我国空间探测相关活动
2011年4月1日,嫦娥-2绕月探测器半年设计寿命期满,全面实现了既定的各项工程目标和科学探测任务。虽然寿命期满,但嫦娥-2运行状态良好,剩余燃料较充足,全系统状态正常稳定。为最大限度发挥嫦娥-2的作用,深化和拓展月球及深空探测成果,嫦娥-2在设计寿命期满后开展了三项拓展试验:一是在已获取99.9%月球图像的基础上,补全了月球南北两极漏拍点,以期获得世界最全的高分辨率月球图;二是用主发动机降轨至15km,再次对嫦娥-3预选着陆区虹湾地区进行了高清晰度成像,以验证在月球背面卫星不可监测的条件下,导航控制与推进系统的协同能力;三是择机离开了月球,飞往日地拉格朗日2点(L2点)长期驻留,进行科学探测。
2011年8月25日,经过77天的飞行,嫦娥-2在世界上首次实现从月球轨道出发,受控准确进入日地L2点环绕轨道。9月1日,嫦娥-2与太阳、地球、L2点处在同一平面内,这标志着嫦娥-2成功完成了各项拓展试验,使我国成为世界上继欧洲航天局和美国之后第3个造访日地L2点的国家和组织。嫦娥-2拓展试验的成功实施,创造了我国航天乃至国际航天的多个“第一”:国际上第一次从月球轨道出发探测拉格朗日点的航天活动;我国第一次对月球以远的太空进行探测;我国第一次开展L2点转移轨道和使命轨道的设计和控制,并实现1.5×106km远距离测控通信。
2 2012年我国空间探测相关活动
2012年6月1日,已在日地L2点开展了10个月科学探测的嫦娥-2成功变轨,进入飞往小行星的轨道。
2012年12月13日,嫦娥-2在距地球约7×106km的深空与图塔蒂斯小行星交会。它们交会时的相对距离约3.2km左右,相对速度10.73km/s,并用星载监视相机对该小行星进行了光学成像。这不仅是我国首次实现对小行星的飞越探测,也是国际上首次实现对图塔蒂斯小行星的近距离探测。
嫦娥-2对图塔蒂斯小行星的探测,使我国成为继美国、欧洲航天局和日本之后世界第4个探测小行星的国家。在实现“轨道测得准、卫星控得住、图像拍得好”的工程目标后,嫦娥-2工程完美收官。
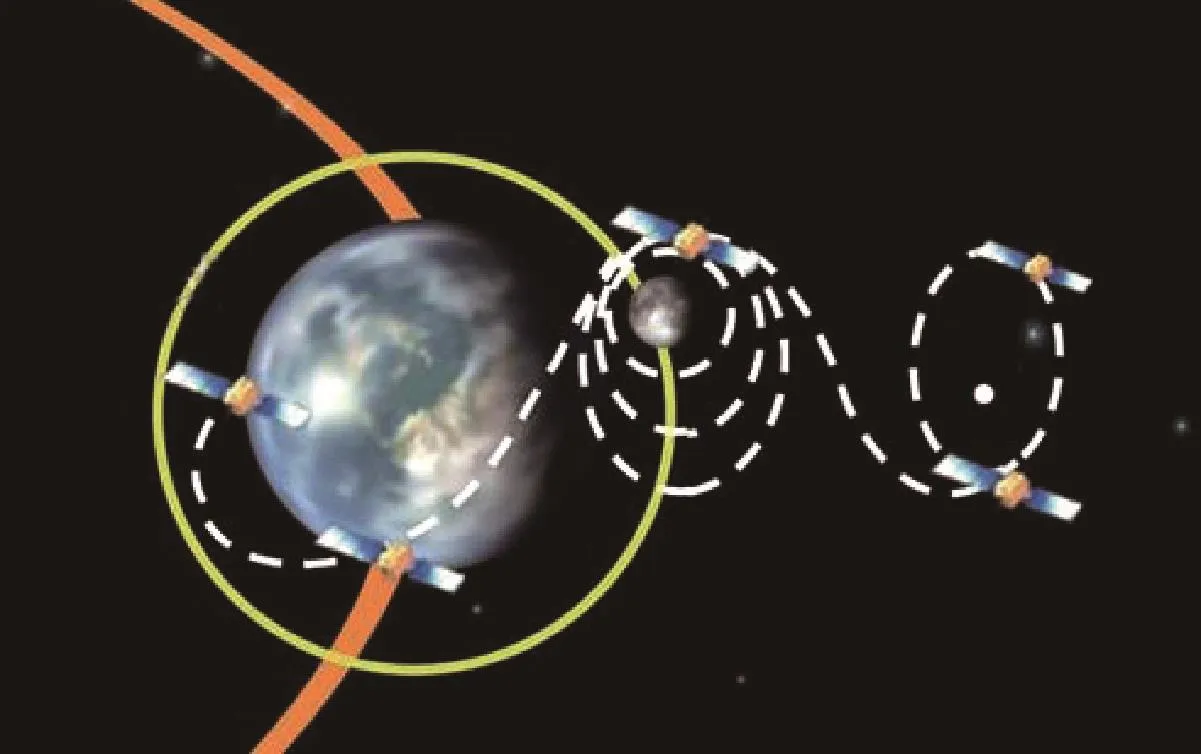
嫦娥-2奔向L2点示意图

嫦娥-2拍摄的图塔蒂斯小行星
嫦娥-2再拓展试验的成功实施,突破并验证了卫星对小天体探测的轨道设计与飞行控制技术,实现了我国航天飞行从4×105~7×106km以远的跨越;为嫦娥-3任务新建成的喀什35m、佳木斯66m大型深空站和上海65m甚长基线干涉测量(VLBI)站提供了最佳合作目标,验证了天地测控设备的正确性和协调性;我国第一次综合利用光学天文望远镜实现对图塔蒂斯小行星的飞行轨道精确测定,进一步验证并完善了国际天文联合会对小行星的轨道观测数据;开辟了我国航天活动一次发射开展月球、日地L2点、小行星等多目标、多任务探测的先河。这些都为我国未来开展月球以远的深空探测积累了宝贵的工程经验。
3 2013年我国空间探测相关活动
2013年12月2日,我国用长征-3B改进型火箭在西昌卫星发射中心成功把嫦娥-3落月探测器直接送入地月转移轨道。12月14日,嫦娥-3在月面软着陆,首次实现了我国对地球以外天体的软着陆。12月15日,玉兔号月球车与嫦娥-3着陆器分离,踏上月面。12月15日,嫦娥-3着陆器与玉兔号月球车互相拍照,它标着着嫦娥-3任务取得圆满成功,使我国成为世界第三个掌握落月探测技术的国家,从而在世界探月第二集团中处于领先地位。
嫦娥-3由着陆器和巡视器(俗称月球车,名为玉兔号)组成,相当于发射了2个月球探测器,分别开展就位探测和巡视探测,这在国际上也是首次。而且它还首次实现了我国航天器在地外天体巡视探测;首次实现了对月面探测器的遥操作;首次实现了探测器在极端温度环境下的月面生存等。这些使我国航天技术实现了跨越式发展,有力地推动了空间科学研究的进步。

嫦娥-3着陆器拍摄的玉兔号月球车在月面工作的实景
其着陆器在落月时克服了反推减速、自主控制、着陆缓冲三大技术难点。与此前国外的落月探测器着陆相比,嫦娥-3着陆的特点是可以悬停、避障,而不是盲落,从而大大增加了着陆的安全性。实践证明,嫦娥-3设计合理、制造精良、操作无误,所以它不仅安全落在了月球19.5°(W)、44.1°(N)的虹湾以东区域,而且非常平坦,只有1°~2°倾斜,远远低于小于15°倾斜的要求,为后续顺利开展科学探测奠定了基础。
其巡视器采用了高精度月面视觉识别、月面巡视动态规划、视觉定位技术路径规划、机械臂运动控制和虚拟现实操作与控制等新技术。依靠视觉完成定位在我国是首次,地面遥操作人员是通过月球车周边环境的立体图像,根据探测目标进行路径规划和移动控制,包括抵达目标后规划遥控机械臂进行探测。

玉兔号月球车用其全景相机中的右相机拍摄的嫦娥-3着陆器

嫦娥-3利用发动机反推减速在月面软着陆过程示意图
嫦娥-3在落月后经受住月球昼夜极端温差的考验而“存活”下来。它首次采用了同位素热源以及导热流体回路、隔热组件、散热面设计、电加热器、低重力环境下机构的重复展开与收拢技术、月尘环境下机构的润滑与密封技术等,以确保舱内温度控制在-20~50℃之间,使探测器系统能顺利度过月夜,太阳一出来,可通过探测器上的光照自主唤醒电路,重新展开的太阳电池翼继续工作。白天时,探测器的太阳电池翼还要调整角度,避免被阳光照射得太热,最热的月午,还要进行“午休”。
它实现了三个科学目标:一是调查了着陆区与巡视区月表地形地貌与地质构造;二是调查了着陆区与巡视区月表物质成分、月球内部结构以及可利用资源;三是探测了地球等离子体层以及开展月基光学天文观测。嫦娥-3在世界上首次使用了极紫外相机、月基光学望远镜和测月雷达3种科学探测仪器,完成了“观天、看地、测月”三大科学任务,从而帮助我国科学家更加准确、更加直接地了解神秘美丽的月亮。
4 2014年我国空间探测相关活动
嫦娥-3着陆器圆满完成第13个月昼的全部预定工作
2014年1月23日,玉兔号月球车与相距24m的嫦娥-3着陆器进行了首次通信,为未来深空探测和建立空间站等打好了通信基础。它们通过特高频(UHF)频段通信链路传递信息,这是一种单项通信设备,即只能由玉兔号月球车给嫦娥-3着陆器发送信息,着陆器可以接收,然后转发给地球上的接收站,但不能发信息给玉兔号。它使我国首次实现了地外天体表面的器间无线电通信。
到2014年底,嫦娥-3着陆器工作正常,但玉兔号月球车在进入第二个月夜休眠前出现了机构控制异常情况,只能停在原地进行就位探测。
2014年12月15日,嫦娥-3着陆器圆满完成第13个月昼的全部预定工作,顺利进入月夜休眠。截至2014年12月14日21:14,嫦娥-3登陆月球已满1年。1年来,北京航天飞行控制中心精心护航嫦娥-3,先后进行了13次月夜休眠和月昼唤醒,成功经受住历次月夜极寒环境的考验;分别于2014年4月5日和10月8日安全度过2次月食。从2014年12月15日起,嫦娥-3着陆器开始超期服役。
探月工程三期再入返回飞行试验获得圆满成功
2017年前后,我国将执行嫦娥-5月球采样返回任务,即用返回舱把月球上的2kg样品带回地球在实验室进行精查。不过,与“神舟”飞船返回舱以大约7.9km/s的第一宇宙速度返回地面不同,未来的嫦娥-5返回器将以接近11.2km/s的第二宇宙速度返回再入大气层。这项技术十分复杂,无法通过地面模拟得到充分验证,所以是未来嫦娥-5月面采样、月面上升、月球轨道交会对接、再入返回四大关键技术中最难的一项,风险很大。
为此,我国决定先发射探月工程三期再入返回飞行试验器(简称试验器),以突破航天器以接近第二宇宙速度再入返回这一关键技术。它先飞抵月球附近,接着,自动返回地球,最后采用半弹道跳跃式以接近第二宇宙速度再入大气层,在内蒙古中部地区以伞降形式着陆。采用弹起然后再入的方式再入返回地球可以拉长试验器再入距离,达到降能减速的目的,确保飞行器返回顺利。
2014年10月24日,试验器升空。同年11月1日,试验器的返回器在内蒙古四子王旗预定区域顺利着陆。这是我国航天器第一次在绕月飞行后再入返回地球,它的成功表明,我国已全面突破和掌握航天器以接近第二宇宙速度的高速再入返回关键技术。
试验器由服务舱和返回器两部分组成,总质量为2t多,返回器安装在服务舱上部。服务舱以嫦娥-2绕月探测器平台为基础进行适应性改进设计,具备留轨开展科研试验功能;返回器为新研产品,采用钟罩侧壁加球冠大底构型,质量约330kg,具备返回着陆功能,与探月三期正式任务中返回器的状态基本保持一致。
这次飞行任务验证了探月三期的六项关键技术:一是验证了返回器气动外形设计技术;二是验证了返回器防热技术;三是验证了返回器半弹道跳跃式高速再入导航制导与控制系统技术;四是验证了月地返回及再入返回地面测控支持能力;五是验证了返回器可靠着陆技术;六是验证了返回器可靠回收技术。
试验器采用绕月自由返回轨道,经历了发射段、地月转移段、月球近旁转向段、月地转移段、返回再入段和回收着陆段6个阶段。它离地面约5000km时服务舱和返回器分离,服务舱进行规避机动,返回器在该阶段首先滑行飞行,在距离地面约120km高处,返回器以再入姿态和接近第二宇宙速度进入大气层。

试验器的返回器采用半弹道跳跃式再入返回示意图
这次任务的完成实现了四大技术突破:高速的气动力、气动热技术;高热量、大热流的热防护技术;高精度、高动态的制导导航控制技术;长距离、大范围的再入回收测控技术。它也实现了我国航天的多个“首次”,例如,首次让航天器从月球回到地球;首次采用半弹道跳跃式返回地球;首次突破了第二宇宙速度再入情况下的一些防热技术;首次采用“8”字形的绕月自由返回轨道。
在这次飞行试验过程中,主要获取了三方面的数据:安全数据记录器(黑匣子)存储的数据;返回器防热层测量数据;地面测控站对返回器直接测量和接收的数据。目前,获得了以下初步结论:航程、开伞点位置精度和落点位置精度均满足要求;飞行过程中,力学过载满足要求;实际飞行气动特性符合理论预期;回收系统工作正常,着陆速度符合设计预期;返回器烧蚀形貌符合预期;返回器内部温度符合要求;返回器内部设备工作正常,落地后结构完整;获取了全部飞行数据,内容完整、有效。总体来看,实现了全部飞行目标,全面突破和掌握了高速半弹道跳跃式再入返回技术。
首次展出我国火星车模型
2014年6月,已成为我国首个人造太阳系小行星的嫦娥-2在与地球之间距离为1.0×108km处仍能进行测控通信,从而为我国未来的火星探测奠定基础。嫦娥-2向更远的深空飞行,既可验证我国测控通信系统的传输能力,也能测试国产元器件寿命。
在2014年11月举行的第十届“珠海航展”上,中国航天科技集团公司首次展出了我国火星车模型。据有关领导透露,中国首次火星探测任务已完成论证,目标是通过一次任务实现火星环绕探测和巡视探测,获取自主火星探测科学数据,实现深空探测技术的跨越。
5 2015年我国空间探测相关活动
嫦娥-3成果一瞥
嫦娥-3落月探测器在月面工作期间,成功采集天文图像,获取地球等离子体层观测结果,多方位测月,获得了多项科学成果。例如,2015年3月12日,我国科学家在国际顶级学术期刊《科学》上发表了玉兔号月球车的新发现——月球的地质史比人们此前认为的更为复杂。由玉兔号上的测月雷达探测到的数据显示,嫦娥-3着陆区表面下至少分为9层结构,这表明在那里曾有多个地质学过程发生,对于探索月球的岩浆演化历史和后期改造作用具有非常重要的意义。2015年12月22日,科研人员在英国《自然·通讯》上刊文透露,玉兔号月球车发现了新的月球岩石品种,这有助于研究月球近期火山活动。迄今为止,从月球采集的玄武岩样本中的钛元素含量要么特别高,要么特别低。但玉兔号检测了在一座环形山附近的“年轻”岩石样本后发现,这里玄武岩的钛含量处于中游水平,铁含量则相当高。这是非常重要的发现,因为玄武岩所含矿物质的结构与成分能够透露出形成玄武岩岩浆的信息。此次研究成果还能帮助科学家更好地分析轨道探测器的月面观测结果。
另外,截至2015年底,嫦娥-3已在月面度过2年,着陆器大部分设备仍在工作,成为全球在月表工作时间最长的人造航天器。

首次展出的我国1∶1火星巡视器(火星车)模型
2015年10月5日,国际天文学联合会(IAU)在其官网上公布:批准将嫦娥-3探测器着陆点周边区域命名为“广寒宫”,其附近的3个撞击坑分别命名为“紫微”、“天市”和“太微”。这是继2010年8月我国首次命名月球地名之后的又一次获批,表明了中国在月球探测和行星科学研究方面的国际影响力正在逐步提高。
试验器的服务舱进行多项拓展试验
在探月工程三期再入返回飞行试验器的返回器安全准确着陆后,为了最大限度利用服务舱的能力,又拉升了服务舱轨道,进一步开展了以下几项拓展试验:①远地点540000km、近地点600km大椭圆轨道拓展试验和地月L2点轨道飞行试验;②返回倾斜环月轨道近月制动飞行验证;③月球轨道交会对接远程导引飞行过程验证;④环月圆轨道演化特性和轨道环境探测;⑤服务舱搭载设备在轨试验,等等。
2015年3月3日~7日,试验器的服务舱完成了第三阶段拓展试验,模拟了嫦娥-5上升器与轨道器在月球轨道交会对接之前的飞行控制过程,验证了嫦娥-5上升器远程导引控制策略、天地协同控制时序、轨道测量与飞行控制精度等相关技术,获取了试验数据和经验,评估了轨道设计和交会方案,为后续嫦娥-5任务顺利实施提供了参考。它包括两部分内容:首先通过3次控制,将服务舱飞行轨道由200km环月圆轨道降低至近月点18km、远月点180km的轨道;然后进行4次远程导引控制,模拟嫦娥-5上升器由距离月面18km处开始,通过不断调整姿态和轨道,追赶轨道器,最终飞行至适合于两器交会对接位置的过程。
在第二和第三阶段试验中,服务舱分别扮演了嫦娥-5任务的轨道器和上升器两个角色,先后模拟了这两个飞行目标在月球轨道交会对接之前的相对运动过程和飞行控制过程。

试验器的服务舱环绕地月L2点飞行示意图
此后,服务舱进行了嫦娥-5采样区成像等第四阶段试验,并择机开展了月球重力场反演等科学试验项目。成像飞行任务于8月30日~9月2日进行,服务舱同时采用双分辨率相机的宽视场相机与窄视场相机,对嫦娥-5预定采样区进行了遥感成像。成像时,服务舱飞行高度距月面30km。为开展成像任务,8月28日,服务舱按计划实施降轨控制,进入了近月点30km、远月点80km的预定轨道。

双分辨率窄视场相机拍摄的月面图像
服务舱于2015年9月2日完成对嫦娥-5预定采样区遥感成像飞行任务,获取了该区域地形地貌信息,为嫦娥-5任务月面软着陆和采样区域的选择提供了依据。其图像分辨率1m左右,已处理的图像效果良好。接下来又择机开展了月球重力场反演等科学试验项目。
服务舱拓展试验获得了多项成果。例如,获取了地月L2点转移轨道、使命轨道的轨道特性与控制经验,为嫦娥-5的轨道控制进行技术验证;验证了交会对接方案中快速测定轨精度和远程导引过程中多次机动飞向控制时序设计的正确性,为降低嫦娥-5的着陆风险和提高安全性提供支持;考核了工程设备的在轨工作情况。此外,还利用双分辨率相机对嫦娥-5采样区开展观测,尽可能获取采样区动力下降航迹区的地形地貌。
嫦娥-4将率先实现月球背面软着陆
我国科研人员在对嫦娥-2探测数据的深度挖掘后,于2015年11月2日在《自然》出版集团旗下期刊《科学报告》在线发表了研究成果,成功揭示了近地小行星图塔蒂斯表面的碎石分布特征。
2015年11月30日,在国防科技工业局召开的探月工程重大专项领导小组第14次会议上,审议通过了嫦娥-4任务实施方案的调整报告、研制总要求及后续总体研制计划,中国嫦娥-4任务将实现世界首次月球背面软着陆。
嫦娥-4原是嫦娥-3的备份,在嫦娥-3任务圆满完成后,为充分利用已有产品条件,开展具有创新性和引领性的探测活动,论证小组深入研究、充分论证,最终确定嫦娥-4任务的调整后的实施方案。
月球背面是月球永远背对地球的那一面,与月球正面不同的是,背面月海较少而多撞击坑。此外,来自地球的电磁波干扰在月球背面都会被遮蔽掉,月球背面电磁环境非常干净,是天文学家梦寐以求开展低频射电研究的场所。
因此,嫦娥-4搭载的载荷与前往月球正面着陆的嫦娥-3不同。如果嫦娥-4携带1个低频射电频谱仪前往月球背面,将实现人类首次在月球背面开展天文观测。而月球背面无法直接与地球进行通信,在嫦娥-4抵达月球背面前,需要发射1颗中继卫星前往地月L2点,为地球与嫦娥-4之间的通信提供服务,该卫星预计在2018年左右发射。
虽然人类对月球探测已有半个多世纪,目前除环绕月球的绕月探测器在轨道上拍摄过月球背面的图片外,尚未有月球探测器实现月球背面着陆,嫦娥-4与地月L2点的中继卫星将创造人类航天史上的奇迹。
诸葛汇/文