UKF在线调整算法及其仿真研究
2016-03-16中国人民解放军海军驻天津707所军事代表室300000
宋 超(中国人民解放军海军驻天津707所军事代表室,300000)
UKF在线调整算法及其仿真研究
宋 超
(中国人民解放军海军驻天津707所军事代表室,300000)
摘要:针对无迹卡尔曼特殊模型的优化问题,以自由调节参数和非线性滤波模型的特点为核心,对无迹卡尔曼滤波进行了理论分析和仿真验证。针对状态方程或量测方程有一个是线性时,给出了模型化的UKF算法,并定量分析了模型化的UKF算法的计算量问题。结果发现模型化UKF计算量更小,运行时间得到改善。
关键词:无迹卡尔曼;模型化;自由调节参数;在线调整
0 引言
无迹卡尔曼滤波(Unscented Kalman Filter,UKF)是一种十分出色的非线性滤波方法。CKF与UKF是两种比较相似的滤波方法。从滤波方法上看,CKF滤波是UKF滤波中自由调节参数的一种特殊情况。由于CKF在高维系统的应用中,估计的精度较高且稳定性较好。因此,CKF自从产生之日起就受到了许多学者的关注。
1 UKF在线调整算法
这里通过高斯分布的近似来选取一步预测中最优的调节参数值。
作为一种准则,量测的一步预测似然函数如下所示:

算法的核心在于计算出k时刻的最优调节参数值。具体表达式如下所示
2 模型化UKF滤波算法
2.1状态方程为线性时
(1)对状态变量均值以及误差协方差阵进行初始化

(2)时间更新过程
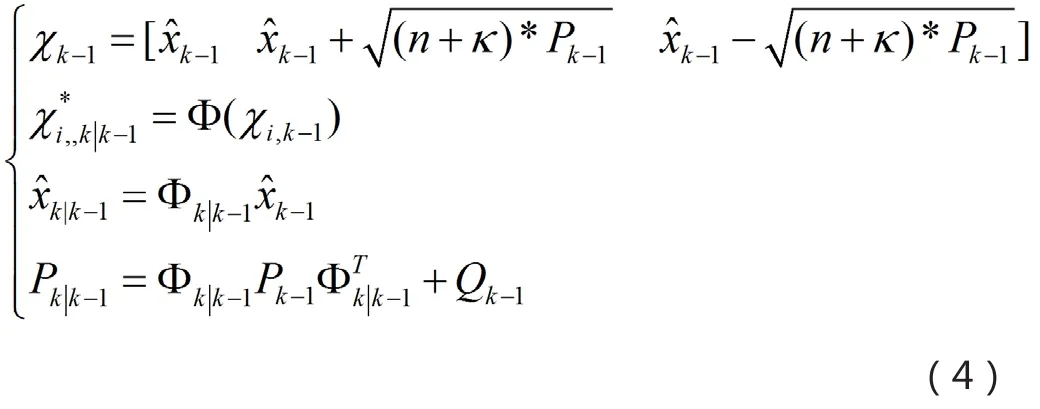
通过比较,UKF和模型化的UKF算法只有在计算状态一步预测均值及状态一步预测误差协方差阵时存在差别。而在模型化的UKF算法中,这两项并没有通过点的加权和来计算均值及协方差,而是采用了线性的更新方式。
2.2量测方程为线性时
1)对状态变量均值以及误差协方差阵进行初始化

2)时间更新过程
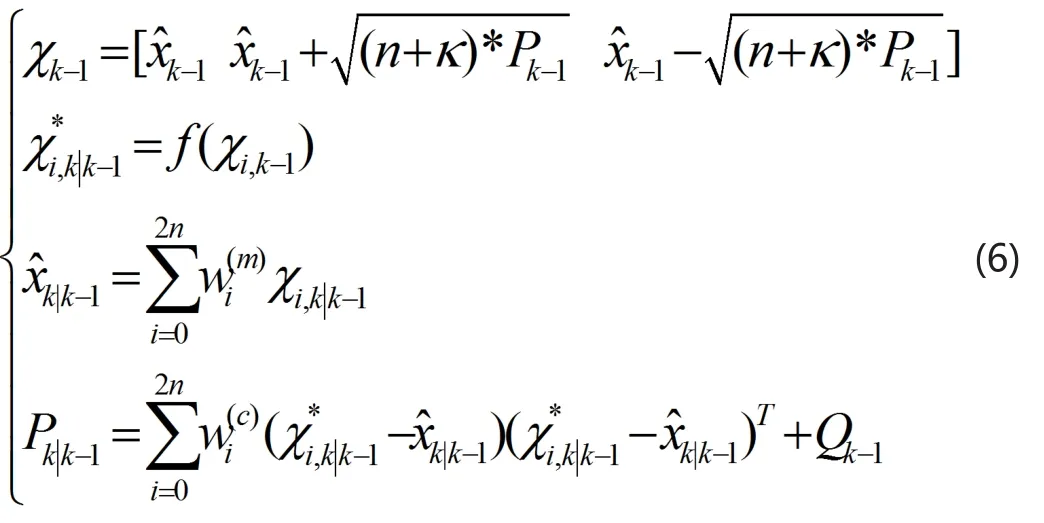
由于量测方程是线性的,因此在进行量测量的有关更新时均采用了线性的更新方式。通过比较,两种算法在计算量测预测均值、协方差及互相关协方差时存在着差别。
3 仿真分析
1)状态方程为线性时。两种算法在每次滤波时的MSE误差是完全相同的。也就是说模型化的算法并不改变UKF的滤波精度。
2)当量测方程为线性时。两种算法在每一时刻的MSE均相同。因此,模型化UKF相比UKF仍不改变滤波的精度。相比UKF,模型化UKF只需分别进行12次乘法和13次加法。这样,每单次滤波时UKF比模型化UKF多进行 次乘法和 次加法。更重要的是,模型化UKF每次在进行量测量的有关更新时并不产生Sigma点及平方根分解等运算,这也就进一步减小了算法的计算量。而且相比状态方程为线性时,这种算法的运行时间改善的更加明显。
4 结论
本文以自由调节参数和非线性滤波模型的特点为核心,对无迹卡尔曼滤波进行了理论分析和仿真验证。推导了无迹卡尔曼滤波算法的近似误差表达形式,证明了自由调节参数的选取与系统模型本身具有相关性,并提出了一种的在线调整算法,即自调整UKF算法。针对状态方程或量测方程有一个是线性时,给出了模型化的UKF算法,并定量分析了模型化的UKF算法的计算量问题。结果发现模型化UKF计算量更小,运行时间得到改善。
参考文献
[1]Gabriel Terejanu, Puneet Singla. AdaptiveGaussian sum filter for nonlinear Bayesianestimation. IEEE Transactions on AutomaticControl, 2011, 56(9):2151-2153.
[2]马建军, 郑志强. 基于差值非线性滤SINS静基座初始对准[J].系统仿真学报, 2007, 19(12):2783-2784.
[3]穆静, 蔡远利.迭代容积卡尔曼滤波算法其应用[J]. 系统工程与电子技术,2011,33(7):1454-1455.
The Research of UKF Online Adjustment Algorithm and Simulation
Song Chao
(The Chinese people's Liberation Army Navy in Tianjin 707 Military Representative Office,300000)
Abstract:Aiming at the optimization problem of the non trace Calman's special model, the theory analysis and simulation verification of the non trace Calman filter are carried out based on the characteristics of the free adjustment parameter and the nonlinear filtering model.This article for state equation or a measurement equation is linear time, given the UKF algorithm modeling and quantitative analysis of the computational problem modeled UKF algorithm.It was found that the computational modeling UKF smaller,runtime can be improved.
Keywords:Unscented Kalman Filter; modeling;free to adjust parameters;online adjustment