考虑时空基准差异的传递对准算法研究
2016-03-16夏家和雷宏杰
夏家和,雷宏杰,李 华,李 伟
(西安飞行自动控制研究所,西安710065)
考虑时空基准差异的传递对准算法研究
夏家和,雷宏杰,李 华,李 伟
(西安飞行自动控制研究所,西安710065)
给出了一种考虑时空基准差异的传递对准算法。该方法在构造传递对准量测时,将剩余时空配准误差增广为状态向量,建立了包含不同步时间、杆臂向量在内的传递对准模型。计算机仿真结果表明,对时空配准剩余误差进行建模补偿能够改善传递对准的性能。在要求快速高精度对准的情况下,考虑主子惯导时空配准剩余误差是必要的。
捷联惯导;传递对准;卡尔曼滤波;时空配准
0 引言
传递对准算法是动基座情况下捷联惯性导航系统(SINS)常采用的一种对准方案。传递对准算法在机载武器、舰载机以及空间武器平台等系统中广泛应用。如美国“哈姆”空地反辐射导弹、“捕鲸叉”反舰导弹、“ADKEM”地空动能拦截器、“BLU-109”制导炸弹、“JDAM”防区外攻击武器[1]、“MK-83”和“MK-84”火箭助推鱼雷;英国的“海鹰”空地导弹;苏联的“厨房”空地导弹、“王鱼”空地反辐射导弹等都应用了传递对准技术[2]。
传递对准算法利用精度较高的主惯导系统来校准未对准好的子惯导系统,其主要任务就是估计出子惯导系统的误差,同时一般还需对子惯导系统的器件误差进行标定。如机载武器的传递对准中,机载主惯导采用惯性级元件,并与GPS等其他高精度导航系统组合,可忽略其导航误差。因此,可以利用主惯导输出(经杆臂效应补偿后)和子惯导输出之差作为观测量,对子惯导的误差状态进行估计。但由于主子惯导时空上的差异,导致构造滤波量测时包含由于时空差异引起的导航信息差异,而传统传递对准算法往往没有针对时空差异进行建模,在载体机动时引起失准角存在较大的误差及波动。本文分析了时空差异的影响,并对其进行简单建模仿真,最后给出工程应用建议。
1 主子惯导时空差异建模分析
主子惯导时空差异,包括时间和空间两个方面,而空间上的差异又包括线位置和角位置差异两方面。主子惯导对准过程中,导航信息的时空差异一般通过时间配准过程进行补偿,但目前工程应用上由于系统总体设计没有关注传递对准时空配准的需求,而专门提供所需的条件,导致无法实现高精度的时空配准。传递对准实质上就是主子惯导系统空间角位置关系对准的一个过程。
1.1 主子惯导时间同步误差
一般而言,传递对准过程中由于数据处理、传输耗时,子惯导系统接收到主惯导系统的对准信息在时间上存在一定的延迟。例如对于机载武器惯导的传递对准,机载主惯导解算的导航信息并不一定能直接应用于机载武器的对准,往往需利用火控系统对主惯导的输出信息进行转换处理,然后再传递给机载武器。对准信息的延迟对武器对准精度影响很大,需采取相应的措施对其进行补偿。
文献[3]分析了时间延迟对加速度计常值偏置估计的影响。文献[4]将延迟时间增广为卡尔曼滤波器的状态,建立了包括数据延迟时间在内的传递对准模型。要将延迟时间列入状态向量需给出延迟时间的模型。考虑到一般火控计算机将时延信息已传递给武器惯导,即延迟时间在具体计算时是可以确定的。因此可不将延迟时间列入状态,而直接利用这一信息对主惯导参考数据滞后问题进行补偿,但这需要工程应用从总体上进行设计。目前处理数据滞后方法大致可分为如下两类:1)直接补偿量测量,可用其他传感器或采用数据外推的方法予以解决[5];2)在过去时刻滤波通过时间更新获得当前时刻的估计值[6-7]。第一种方法较简单,对量测量进行补偿后即可按照通常的滤波算法进行处理。
1.2 主子惯导空间位置差异
用r代表子惯导相对主惯导的位置矢量,m、s分别代表主惯导机体系和子惯导机体系,下文中意义同此处不再作说明。则主子惯导系统的位置关系在惯性系表示如下
Rs=Rm+r
(1)
可推导得到速度关系方程
(2)
式中,dr/dt表示由风等激励的振动和非刚体结构引起的弹性变形速度。一般实际应用中可认为相对位置矢量不变或dr/dt小到可忽略,作为量测噪声处理。因此式(2)可简化为
(3)
进一步可推导得到主子惯导所在位置处加速度之间的关系为
(4)
主惯导与子惯导经度、纬度、高度之间的关系可通过在主惯导系统中定义的相对位置向量来计算
(5)
本文主要考虑速度、位置量测匹配算法,因此主子惯导之间的角位置关系这里不再赘述。
2 考虑时空差异的传递对准算法
不失一般性,假定传递对准时进行时空配准后,主子惯导量测存在的不同步时间、杆臂向量可建模为随机常值,将其作为状态向量增广为系统状态建立传递对准模型。
状态向量由子惯导系统误差(速度、姿态误差)、器件误差(陀螺随机常值漂移、加速度计随机常值偏置)、不同步时间τ、杆臂向量rb所组成,状态向量选为
(6)
结合捷联惯导误差方程可得具体系统方程如下[8]:
(7)

(8)

具体量测矩阵为
(9)
3 仿真分析

对准期间大部分保持200m/s速度匀速平飞,在120~150s以3(°)/s的航向角速度转弯,航向改变90°。
不考虑剩余时空配准误差时,仿真结果如图1、图2所示。对剩余时空配准误差建模后,仿真结果如图3、图4所示。

图1 不考虑剩余时空配准误差时失准角收敛曲线Fig.1 Misalignment angle curve without considering residual space-time alignment error

图2 不考虑剩余时空配准误差时陀螺漂移估计曲线Fig.2 Estimated gyro bias curve without considering residual space-time alignment error
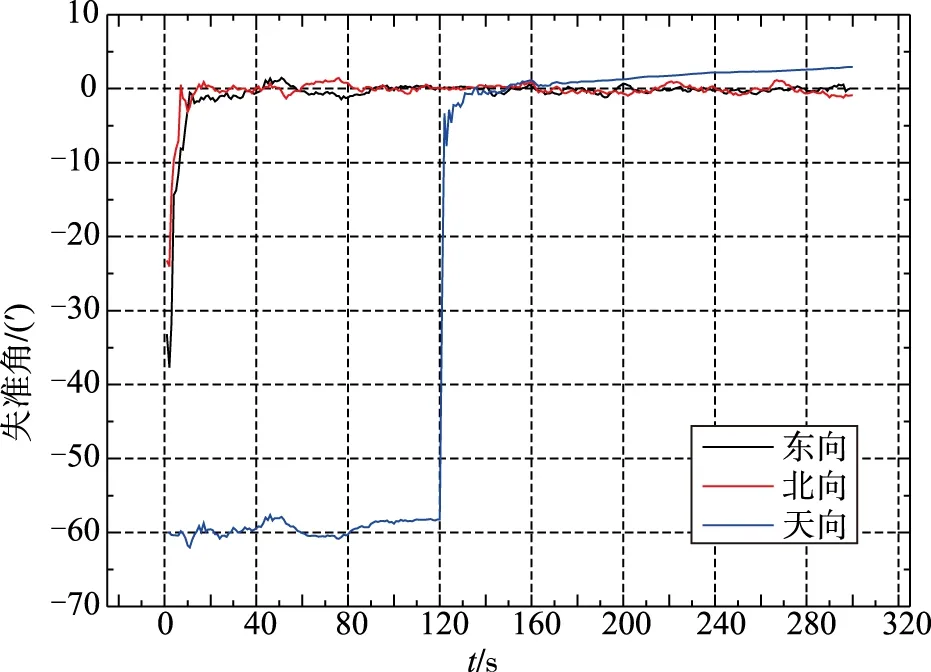
图3 考虑剩余时空配准误差时失准角收敛曲线Fig.3 Misalignment angle curve considering residual space-time alignment error

图4 考虑剩余时空配准误差时陀螺漂移估计曲线Fig.4 Estimated gyro bias curve considering residual space-time alignment error
比较图1和图2、图3和图4可知,虽然两种情况最终都能完成对准任务,但对时空配准剩余误差进行建模后,载体转弯过程中水平失准角及水平陀螺漂移估计的波动明显减小,特别是y轴陀螺漂移估计精度明显提高。对时空配准剩余误差后建模后大大提高了传递对准滤波模型在载体机动过程中的适应性。另外,在转弯条件下,杆臂向量与时间不同步引起的速度误差很难区别。若是单纯加减速或摇翼机动,对时空配准剩余误差进行建模后对准性能改善将更明显。采用速度匹配传递对准时,一般为加速航向收敛需要进行加减速、蛇形等机动,如图1、图3所示在载体转弯过程中航向失准角快速收敛。但在机动过程中剩余时空配准误差将被激发,因此在快速高精度对准过程中考虑剩余时空配准误差是必要的。
4 结论
给出了一种考虑主子惯导时空差异的传递对准算法。首先简要介绍主子惯导时间不同步的处理方法及主子惯导导航参数空间线位置关系。针对传递对准时空配准后的剩余时空差异,将其建模为随机常值增广为系统状态,建立包含不同步时间、杆臂向量的传递对准模型。仿真结果表明,在载体存在机动时考虑时空配准误差的传递对准算法在对准精度及收敛速度上有一定改善。传递对准工程应用时需总体上考虑时空配准需求,对于高精度对准应用场合可对剩余时空配准误差进行建模补偿,以提高对准精度缩短对准时间。
[1] Klotz H A Jr.GPS-aided navigation and unaided navigation on the joint directattack munition[C].IEEE Position Location and Navigation Symposium,1998.
[2] 王司,邓正隆.惯导系统动基座传递对准技术综述[J].中国惯性技术学报,2003,11(2):61-67.
[3] Bar-Itzhack I,Y Vitek.The enigma of false bias detection in a strapdown system during transfer alignment[J].Journal of Guidance,Control,and Dynamics,1985,8:175-180.
[4] 扈光锋,王艳东,范跃祖.传递对准中测量延迟的补偿方法[J].中国惯性技术学报,2005,13(1):1-14,20.
[5] 康国华,刘建业,熊智.导航系统中量测滞后异步多传感器集中滤波算法[J].东南大学学报(自然科学版),2005,35(5):714-718.
[6] 夏家和.捷联惯导抗扰动对准相关技术研究[D].西北工业大学,2010.
[7] 夏家和,秦永元,赵长山.传递对准中主惯导参考信息滞后处理方法研究[J].兵工学报,2009,30(3):342-345.
[8] 秦永元.惯性导航[M].北京:科学出版社,2006.
Study on Transfer Alignment Algorithm Considering Space-time Difference
XIA Jia-he,LEI Hong-jie,LI Hua,LI Wei
(AVIC Xi’an Flight Automatic Control Research Institute,Xi’an 710065,China)
A transfer alignment algorithm considering space-time difference is proposed.The proposed method extends the residual space-time alignment error to filtering states,a transfer alignment model considering time asynchronous error and level arm is designed.Simulation results demonstrate that the proposed algorithm improved the performance of the transfer alignment.In the fast and high accuracy alignment it is necessary to take into account of the residual space-time alignment error.
Strapdown inertial navigation system;Transfer alignment;Kalman filter;Space-time alignment
2015-10-22;
2015-11-15。
夏家和(1981-),男,博士,高工,主要从事捷联惯导及组合导航研究。E-mail:ftn2@163.com
V249.32
A
2095-8110(2016)01-0025-04