一种水面靶标雷达散射分布特性海上测量方法*
2016-03-15王海涛阎肖鹏
王海涛 阎肖鹏
(91550部队93分队 大连 116023)
一种水面靶标雷达散射分布特性海上测量方法*
王海涛阎肖鹏
(91550部队93分队大连116023)
摘要介绍一种固定水面靶标海上雷达散射特性岸基动态测试技术,靶标船体单点锚泊后,利用安装在靶标船体上的定向侧推装置推动船体围绕锚泊点转动,同时通过GPS记录船体的位置与航向姿态数据,给出了RCS测试数据处理方法。这种海上测试方法实施方便,靶标RCS海上测试结果与数字建模比对结果说明了该测试方法的有效性。
关键词水面靶标; 雷达散射截面; 测量; 定向侧推; 统计分析
Target Vessel’s RCS Directivity Measurement Method on Sea
WANG HaitaoYAN Xiaopeng
(Unit 93, No. 91550 Troops of PLA, Dalian116023)
AbstractA method of station radar target vessel RCS directivity measurement with the dynamic measuring facility on shore is introduced. The heading of vessel body can be orientated by an outboard modulating system, the body’s position and attitude are acquired by GPS in the meantime, and the RCS data processing method is given. This method carries out simply, and the effectiveness of RCS measurement method is proved by the compare result of target vessel RCS sea-test and computer-based theory calculations.
Key Wordstarget vessel, radar cross section, measurement, heading control, data processing
Class NumberTP391.9
1引言
水面雷达靶是为海上反舰武器飞行试验提供水面舰艇雷达散射分布特性模拟[1~2],实现方式是在船体上不同位置和高度加装数十个各类角放射体实现对舰艇目标方位0°~360°、俯仰-15°~30°范围内RCS分布特性真实模拟,通过改变角反射体的类型与数量,雷达靶可模拟不同波段和不同RCS分布特性的舰艇目标[3]。靶标设计建造完成后为了准确掌握其真实RCS分布特性,与理论设计值进行比对分析,需进行海上动态测试。
2固定雷达靶海上RCS特性测试方法
2.1以往固定雷达靶海上RCS测试方法
在海上动态RCS测量中,对舰船目标关注的是在各个方向上的RCS分布特性[4~5]。雷达靶RCS测量需要获取360°内的分布特性,不过本身无航行能力,海上试验时使用单点锚泊方式作为固定靶使用,不像一般水面舰船,依靠自身的航向能力在测试海域进行圆周运动即可完成RCS测试。
以往对固定水面雷达靶的海上测试一般采用两种方法:第一种是将靶标锚泊后,任其在海面漂浮进行测试,缺点是测试时间长,且很难获取360°内的RCS分布特性;第二种是采用拖船长拖靶标船体做圆周运动的方法,缺点是在测试过程中拖船与靶标之间难免会有遮挡和混合效应,从而影响测试结果,即使采取规划航线的措施,也存在试验组织困难、周期长而且对测试场地要求较高的困难。
2.2基于定向侧推的海上RCS测试方法
为了克服以往雷达靶RCS分布特性测量方法的不足,利用在靶标船体的艉部加装定向侧推装置[6]:在单点锚泊后依靠定向侧推的推力,推动船体进行360°的圆周运动,从而完成全方位的RCS分布特性测试。采用定向侧推装置的优点是测试精度高,结构简单,造价低,拆卸方便,对船体不必做改动,后期维护保养方便。通过海上试验验证,在渤海海域海况4级以下和水流速度在2节以下使用效果较好。
船体定向侧推技术是船舶动力定位系统中的一种,只是对船体航向进行调整,实际上船体是围绕海底的锚进行类似圆周运动。定向侧推装置安装在靶标船体的艉部,由船外机、船外机自动控制单元、机械分系统、GPS位置航向测量单元、数据记录仪、电源等组成。
船外机自动控制单元包括转向机构、油门档位调节机构、定向侧推控制器、伺服驱动单元等部分。定向侧推控制器依据上位机指令控制船外机电源、风门和点火;控制转向电机调整船外机推力方向;控制油门档位伺服驱动单元调整油门大小和档位位置。在靶船动力定向的过程中,船外机工作产生侧推力,克服海流、风阻力推动船体转动,从而控制船体的航向。
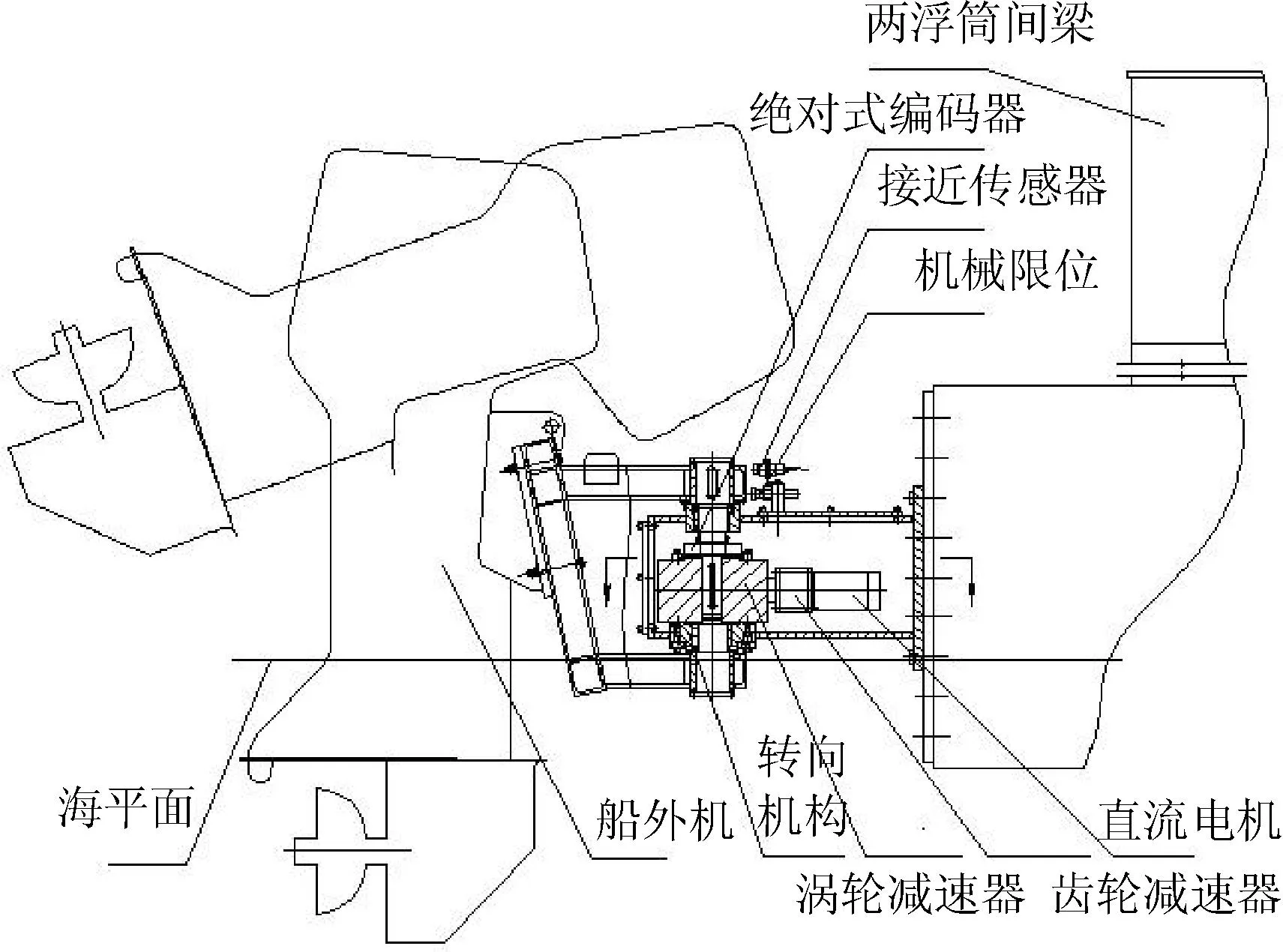
图1 靶船侧推装置结构简图(侧视图)
机械分系统由转向机构、驱动装置、绝对式编码器、接近传感器组成,结构如图1所示。转向机构主要由固定臂、转动臂、轴、两个圆锥滚子轴承、两个深沟球轴承等件组成。转动臂与轴用键连接、再通过两个圆锥滚子轴承与固定臂形成转动副,上圆锥滚子轴承还起到承托船外机及转动臂重量的作用。船外机挂在转动臂上,用四个螺栓与转动臂连接,固定臂底板插入靶船两浮筒间梁上焊的滑槽内,高低可调整。驱动装置主要由直流电机、齿轮减速器、蜗轮减速器等件组成。直流电机转动,通过两级减速器传给轴,轴通过键与转动臂连接,从而带动转动臂及其上的船外机一起转动。蜗轮减速器具有自锁功能,当船外机转到某一位置,直流电机停转后,船外机可在该位置停住,然后进行定向侧推。轴的转动通过一根同步齿形带及两个齿数相同的带轮传出,在传出轴上安装绝对式编码器,绝对式编码器就将转动臂上船外机的转角信息反馈给控制系统。线控驱动装置。线控驱动装置内有两个电动推杆,由步进电机驱动,带动船外机的油门线和挡位线往复运动,从而调节船外机的油门和挡位。定向侧推主控制器在接收上位机的转向命令后,通过电机驱动器控制直流电机运行,采用8位绝对式旋转光电编码器实时反馈转向机构的位置信号,从而实现准确的转向定位功能。
GPS位置航向测量单元为上位机调整航向提供基准,也是事后RCS测试数据处理的基准。数据记录仪用来实时记录陆基下发的各种定向侧推控制指令、船外机的工作状态和载体位置、航向、时间信息等。作为事后RCS数据处理依据。
3基于定向侧推的靶标RCS测试方法
测试原理如图2所示[7],RCS测量系统位于海边一山顶,场地平坦且周围无强散射建筑,θ为RCS测试设备照射天线的3dB宽度,方位角α为靶标船艏方向偏离中心波束的角度,R1为天线到雷达靶中心的水平距离,R2为3dB波束在雷达靶中心位置的横向扩展线度[8]。
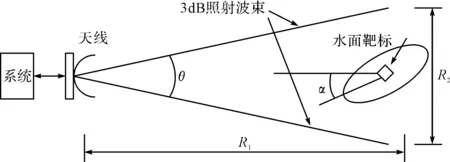
图2 雷达靶海上RCS测试示意图
测量原理基于比较法:
10lgσ=Dr+20lgVr-(D0+20lgV0)
+40lgR-40lgR0+10lgσ0
(1)
式中:D0为测量定标体时接收机插入衰减分贝数;Dr为测量目标时接收机插入衰减分贝数;20lgV0为测量定标体时接收机基本量程内回波电压分贝数;20lgVr为测量目标时接收机基本量程内回波电压分贝数。
定标体与目标距离相同时,式(1)变为
10lgσ=Dr+20lgVr-(D0+20lgV0)+10lgσ0
(2)
根据定标电压、定标体的理论值和目标的实测回波电压,按式(2)计算目标的RCS。测试人员遥控雷达靶船体上的定向侧推装置进行360°旋转圆周运动,一般2~3圈即可完成一组RCS分布特性的测试。在海上测试前后都需要定标操作,如风力较小,利用气球悬挂定标球的方式标定;如风力较大,则将角反射体或龙泊球座于低密度泡沫材料上,固定在木质小渔船上标定。
4RCS测试数据处理方法
4.1海上测试数据处理流程
海上测试数据处理流程见图3,主要包括角度标校、幅度标校和处理分析三个过程。采用岸基海上测量方式,在俯仰2.5°条件下对雷达靶进行全方位RCS测试,相当于俯仰-15°~30°范围内的一个切口数据,并在该切口进行测试与设计的比较,以验证设计的准确性。
4.2海上测试数据与理论计算数据比对分析
海上RCS测试值与理论计算数据比对分析包括统计特征值分析、相似度分析和概率分布误差分析。
统计特征值分析可以针对平滑前、后的RCS随方位变化的序列进行。在平滑前后的序列基础上进行统计特征值分析,主要特征值包括均值、均方差以及10%、20%、50%、80%、90%五个概率点。特征值计算按下述步骤进行:
1) 计算序列的均方差;
2) 对序列按RCS从小到大的顺序排列;
3) 计算排序后序列的均值以及10%、20%、50%、80%、90%五个概率点;
4) 将均值以及10%、20%、50%、80%、90%五个概率点换算成对数形式。
相似度分析。对于选定的海上典型目标,靶标给定范围内RCS空间分布图模拟近似度≥0.75,即相关系数≥0.75。为了消除海杂波、船姿变化等随机因素对相关系数评估的影响,测试数据和理论计算数据均进行平滑后再计算相关系数。设实测数据序列用X表示,理论计算数据序列用Y表示,序列X和序列Y的相关系数为
(3)
概率分布误差分析分两步,首先0°~360°全方位分析分布误差,评估测试数据与理论计算数据在较大空间范围上的分布近似度,然后按照艏部(方位0°~45°、315°~360°)、右舷(方位45°~135°)、艉部(方位135°~225°)、左舷(方位225°~315°)四个局部空间范围上分析分布误差,以评估测试数据与理论计算数据在局部空间范围上的分布近似度。海上RCS测试数据的累积概率密度为CDFm(i),设计数据的累积概率密度为CDFc(i),则累积概率密度误差为[9]:
(4)
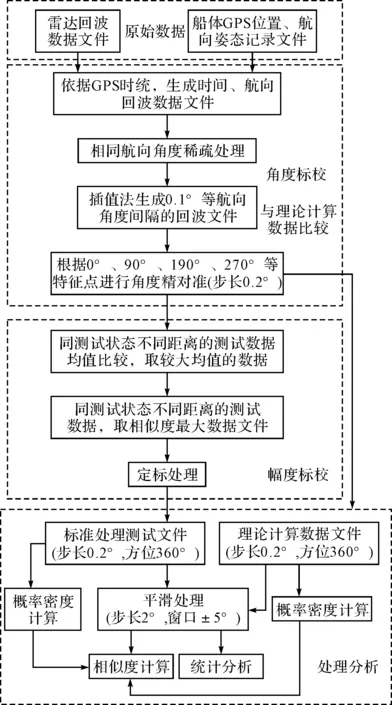
图3 RCS测量数据处理流程
5RCS测试数据分析[10]
在俯仰2.5°试验条件下,选取三种不同角反模拟组合测试结果与设计值比较见表1。在此测试条件下设计值与测试值误差最大为0.4dB,证明RCS分段均值的80%概率点达到了设计指标。

表1 岸基测试结果与设计值的比较
图4、图5所示为某波段3000m2海上测试数据与计算数据平滑前后的曲线比较。三种不同组合理论设计值与测试值的相关系数见表2。测试数据与计算数据的相关系数≥0.75,各角反组合的模拟近似度检测合格。
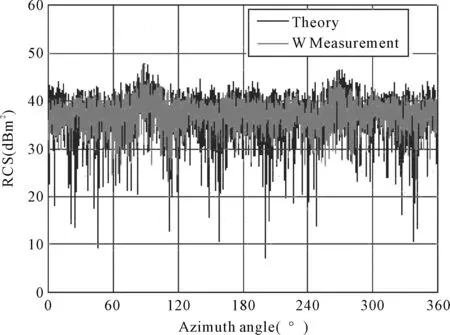
图4 某波段3000m2测试与计算数据平滑前比较
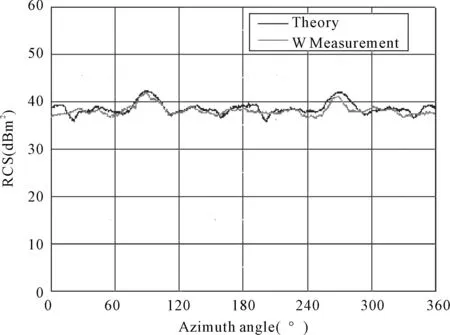
图5 某波段3000m2测试与计算数据平滑后比较
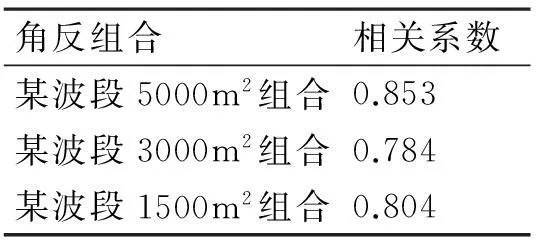
角反组合相关系数某波段5000m2组合0.853某波段3000m2组合0.784某波段1500m2组合0.804
三种不同组合理论设计值与测试值的累积概率密度误差见表3,最大累积概率密度误差为0.185,小于0.25,可以认为所比较数据的分布近似度大于0.75,各组模拟近似度检测合格。
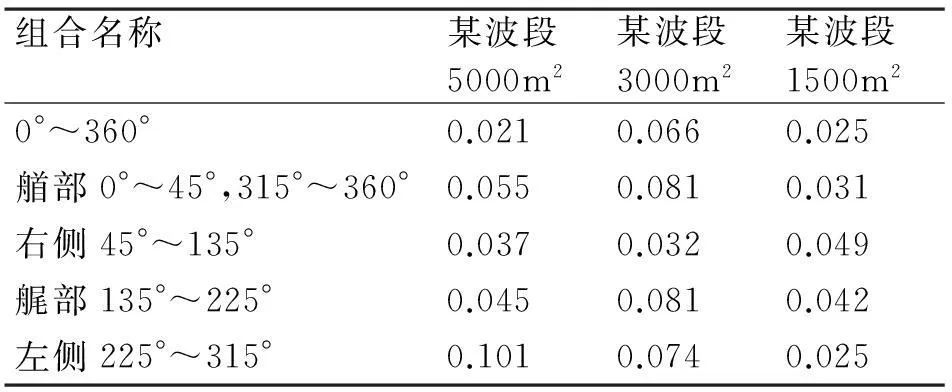
表3 不同组合的累积概率密度误差
6结语
海上利用加装定向侧推方式完成水面雷达靶的海上RCS分布特性测量,具有组织实施和技术实现方便、精度高、无累计误差、对测试场地要求较低的优点,在海上靶场的多次靶标海上实际测试中均取得了预期效果。
参 考 文 献
[1] 王文斌.海军装备试验靶标技术[M].北京:国防工业出版社,2007:3-26.
[2] Knott, Eugene F., Shaeffer. Radar Cross Section[M]. 2nd Edition, Raleigh, NC: SciTech Publishing,2004:42-183.
[3] 王海涛,付军,刘华军.体目标水面雷达靶的设计与实现[J].舰船电子工程,2011,31(2):98-101.
[4] 陈健,王永明.舰船目标特性研究综述[J].舰船电子工程,2008,28(5):17-21.
[5] 黄培康,殷红成,许小剑.雷达目标特性[M].北京:电子工业出版社,2005:9-132.
[6] 王冬东.浮体艏向调整系统的设计与实现[D].哈尔滨:哈尔滨工程大学,2010:8-25.
[7] 何国瑜,芦才成.电磁散射的计算和测量[M].北京:北京航空航天大学出版社,2006:76-97.
[8] 中国人民解放军总装备部.目标与环境特性数据元[S]. GJB5254-2004:1-47.
[9] Kai Lai Chun. A Course in Probability Theory[M]. 3nd Edition, New York: Academic Press,2001:150-204.
[10] 刘利生.外测数据事后处理[M].北京:国防工业出版社,2000:236-285.
中图分类号TP391.9
DOI:10.3969/j.issn.1672-9730.2016.02.040
作者简介:王海涛,男,高级工程师,研究方向:海上战场环境与目标特性,靶场测控技术。阎肖鹏,男,高级工程师,研究方向:靶场测控技术。
*收稿日期:2015年8月11日,修回日期:2015年9月30日
