鱼雷双维尺度声靶回波信号的方位走向识别方法*
2016-03-15武鹤龙
武鹤龙 潘 明
(91388部队93分队 湛江 524022)
鱼雷双维尺度声靶回波信号的方位走向识别方法*
武鹤龙潘明
(91388部队93分队湛江524022)
摘要论文在鱼雷双维尺度声靶模型基础上,基于Matlab语言和鱼雷接收声基阵,对接收的双维尺度声靶回波信号进行仿真分析,用方位走向方法在回波信号里提取出靶标的方位走向信息,得出回波信号水平方位走向和垂直方位走向的态势图,推导出方位走向方法能够有效的对尺度目标的尺度信息进行分析和识别,双维尺度靶标能够更加逼真的模拟潜艇目标的双维尺度特性,为鱼雷尺度识别的的后续研究提供可靠有力的参考和依据。
关键词鱼雷; 双维尺度; 声靶; 方位走向
Direction Identification Method of the Two-dimensional Scale Sound Target
WU HelongPAN Ming
(Unit 93, No. 91388 Troops of PLA, Zhanjiang524022)
AbstractIn this paper, analysis and simulation of the echo signals is conducted based on the torpedo model, Matlab and sound receiving arrays. The bearing trend information of the target for torpedo is extracted with the identification method, illustration to the horizontal and vertical direction of the echo signal is obtained. Finally the conclusion is made that the identification method for the bearing trend can recognize the dimension information of the scale target, the two-dimensional scale sound target can be more realistic simulation of submarine target. This paper provides a powerful and reliable reference for future research to dimension recognition of target.
Key Wordstorpedo, two-dimensional scale, sound target, bearing trend
Class NumberTB391
1引言
目前,国内多数水下靶标模拟的是潜艇点目标,或是只模拟潜艇横向艇体的线性尺度靶标,而忽略了纵向维度的围壳尺度对声信号的反射特性。围壳部分的声反射特性对回波信号的各项参数,特别是目标的纵向维度的方位走向信息具有相当程度的影响。本文用方位走向方法对鱼雷双维尺度声靶回波信号进行了尺度识别,推导出回波信号水平方位走向和垂直方位走向的结果,得出方位走向方法可以有效的对目标的不同方向进行尺度识别、双维尺度声靶能够逼真有效的模拟目标的纵横双维尺度特性的结论。
2鱼雷声基阵接收回波信号模型的创建
2.1双维尺度声靶回波信号模型
对于潜艇等较大型的鱼雷目标来说,由于其具有一定的尺度,产生的反射回波信号源于一个在距离和方位上有一定分布的延展体。这个延展体可以近似等效于在空间上有一定分布的若干个“点”目标之和,对于尺度靶标来说,叫做点源或亮点。一般尺度靶模拟的是潜艇目标横向尺度的声反射特性,而双维尺度靶不仅模拟横向尺度而且模拟了纵向尺度上的声反射特性[1]。
鱼雷发射声信号后,在理想环境下(不考虑噪声等环境干扰),经过一段距离达到靶标,尺度靶标各个亮点对入射信号进行反射,回波信号经过反射后到达鱼雷接收端。可见,鱼雷接收的回波信号是由尺度靶标上各个亮点反射回波信号的叠加而形成的[2]。
尺度声靶供靶过程中,鱼雷的应答信号受水声环境等因素影响,主要发生多普勒频移、时间的延迟和压缩展宽、幅度的衰减等变化[3]。
鱼雷发射信号经过时间τi1到达亮点i,亮点i反射的声波经过时间τi2到达鱼雷,ωi1表示入射过程的频率变化(多普勒频移),ωi2表示反射过程回波信号的频率变化,TL表示声传播损失,假设鱼雷发射脉冲信号为f(t),亮点i的目标强度为TSi,则鱼雷接收到目标亮点i的反射回波信号为
(1)
双维尺度靶回波为其所有亮点回波的叠加,因此总的回波为
·f(t+τi1+τi2)·ej(ωi1+ωi2)
(2)
当然,横向亮点和纵向亮点的回波信号可以依照上式分开来算,即先各自算出横向N个亮点和纵向M个亮点的回波信号,再将两部分矢量叠加,即可得到总的回波信号[4]。如果将强亮点与潜艇的主要反射部位结合考虑,通常有六个强亮点分布于潜艇目标的艏部、前部、中部、后部、艉部、围壳这六个部位[5]。因此,面尺度靶标模型在工程上可以简化为有限亮点模型,如式(3):
(3)
2.2鱼雷信号接收声基阵模型
以上下左右各有一个接收单元的声基阵为例,鱼雷接收阵示意图如图1所示。

图1 鱼雷声接收阵
鱼雷接收声基阵上下左右接收单元与声基阵中心点的坐标位置关系如图2所示。

图2 声基阵上下左右接收单元与声基阵中心点的坐标位置关系

(4)
(5)
假设鱼雷声基阵中心点的位置坐标为S,鱼雷声基阵各个水听器之间的距离为d,那么根据上下左右接收单元与声基阵中心点的坐标位置关系,可以得到声基阵各个接收单元的位置坐标[6],表达式如式(6):
(6)
而后根据声靶回波信号模型,鱼雷接收中心点对靶标回波信号的接收表达式,代入由中心点的信息参数推导的各个鱼雷接收单元的相关信息参数,就可以得到接收单元接收的靶标回波信号信息[7]。
3鱼雷双维尺度声靶回波信号的方位走向分析
3.1鱼雷双维尺度声靶回波信号仿真的条件设定
设定鱼雷的寻的信号为单频矩形波,填充频率为f=24kHz,采样频率fs=256kHz,幅度设置amp=1,脉冲起始时间为ts=0,脉冲宽度为0.02s,鱼雷相对靶标的初始距离为100m,鱼雷所处的深度为50m水深。
双维尺度靶标模型由六个亮点组成,横向排列5个,每个间隔14m,从艇艏到艇尾的顺序作为三维坐标系的X轴,艇宽的方向作为Y轴,纵向围壳的方向作为坐标系的Z轴,所以可以得到各声反射亮点在坐标系中的坐标,纵向亮点在距离艇艏亮点2/3处,距离X-Y轴平面约10m,假设靶标所处深度为50m,尺度靶标的速度设为4节,鱼雷航速为25节。根据鱼雷相对靶标原点在坐标系中的不同的方位,可以得到鱼雷的初始坐标,通过回波信号模型,即可得到鱼雷尺度靶标的回波信号,而后在经过分析变换和提取,可以得到回波信号的时域、频域和方位域参数指标的异同点。
3.2双维尺度声靶回波的方位走向分析
目前,通过提取目标的尺度特征量来识别目标的方法,主要有成像法和方位走向法。本文将用方位走向法对尺度声靶回波进行仿真分析。研究方位走向法的特点,对试验中更好的识别目标的尺度特性具有十分重要的意义。
方位走向法是基于尺度目标的距离——方位延展特性和分裂波束测向技术而提出的一种目标尺度识别方法,根据尺度目标相对于鱼雷的方位走向的变化趋势就可以判断目标是尺度目标还是点目标,是横向线性的尺度目标还是双维的面尺度目标[8]。
方位走向法是基于尺度目标的距离——方位延展特性来进行尺度识别的,鱼雷对靶标的方位走向的分析判别是通过上下和左右两个水听器分别进行分裂波束测量推导得出声程差和方位信息来实现的。
本文讨论的以鱼雷接收声基阵中心为测量原点,以鱼雷速度矢量的方向为中心轴,水平走向的设定是向左和向右滑动测量靶标亮点目标相对于鱼雷中心点的方位走向,偏左为负值,偏右为正值,垂直走向的设定是向上和向下滑动测量靶标亮点目标相当于鱼雷中心点的方位走向,偏上为负值,偏下为正值。
3.2.1回波信号的方位走向分析法
上下左右分布四个接收单元的声基阵对靶标的方位走向的测算是通过上下和左右水听器分别进行分裂波束测向推导声程差和方位信息得出的。

图3 分裂波束测向中的左右波束时间轴分割示意图
假设鱼雷左水听器接收到的回波信号为syL,右水听器接收到的回波信号为syR,对接收到的信号进行长度为N个点的分割获取,将其分成若干段,对每一段进行分裂波束测向即可得出一组按时间顺序排列的方位信息序列,而后,在Matlab中用时间-方位关系画图,就可以得出目标水平方向的方位走向,垂直方位走向推导同[9]。
3.2.2双维尺度声靶回波的方位走向仿真结果及分析
鱼雷相对线、面尺度靶标原点的方位分别为0°、30°、90°、120°时候的回波信号水平、垂直方位走向的结果态势图如图4所示。
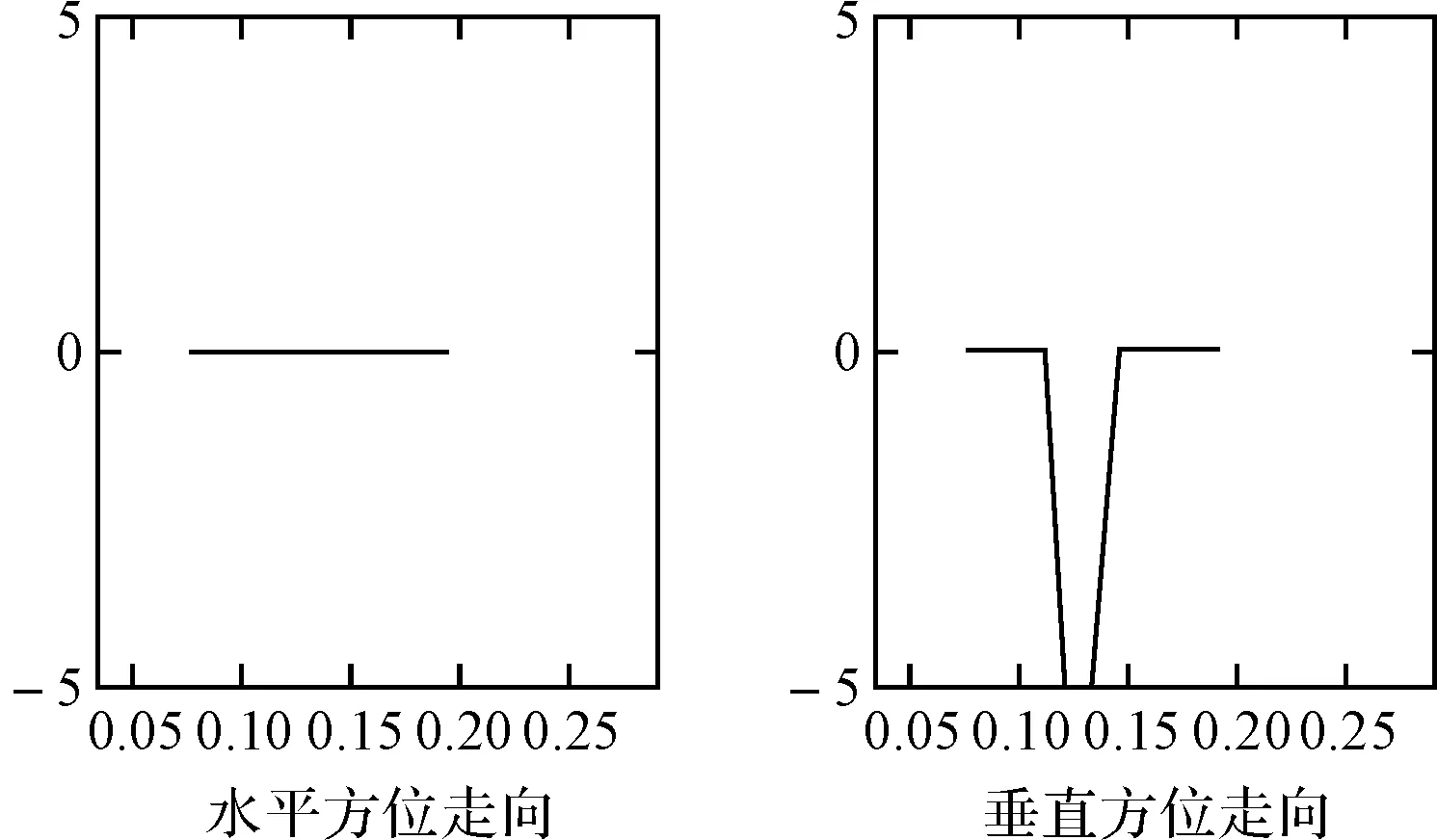
图4 方位为0°的回波信号水平、垂直方位走向
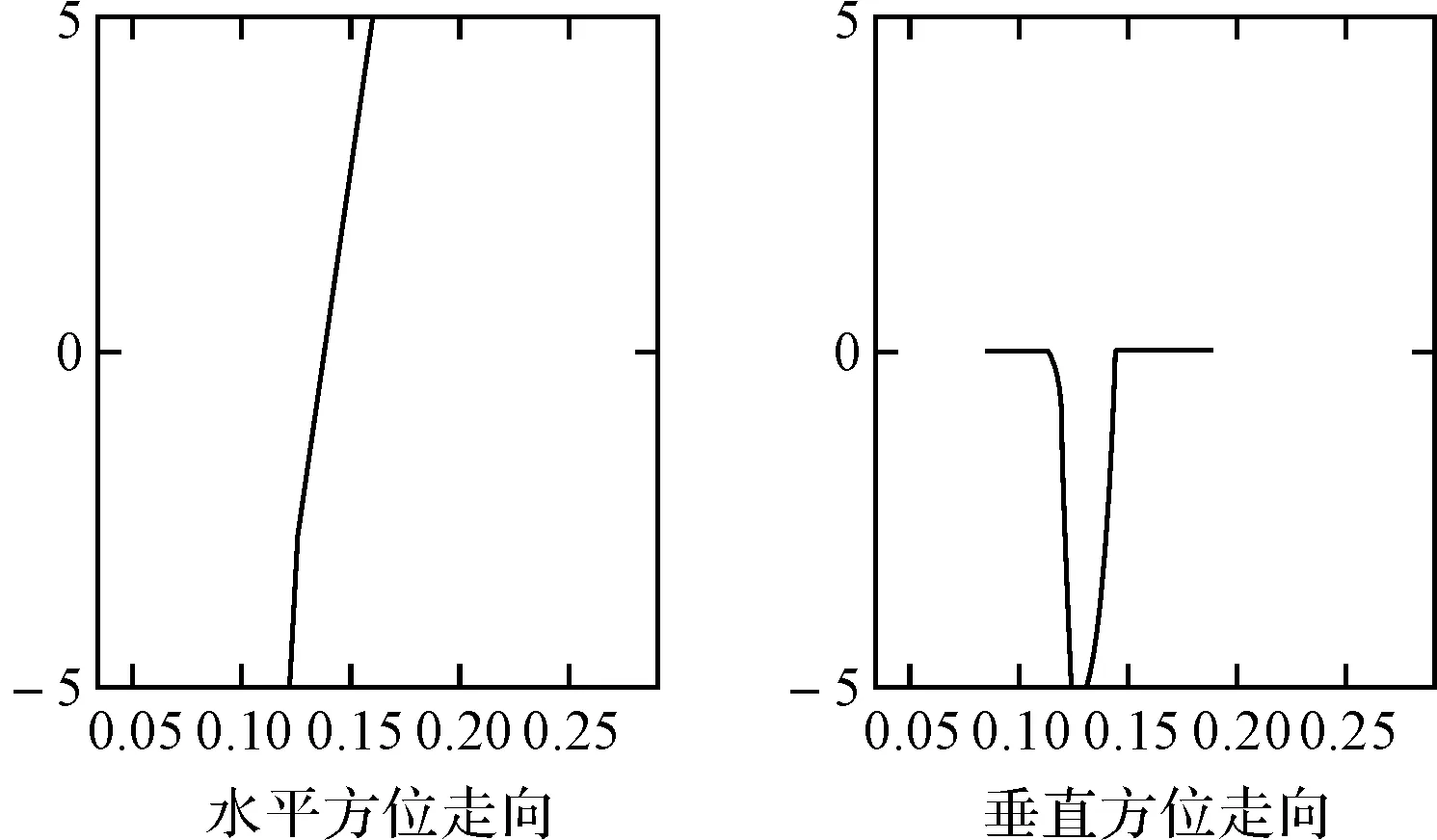
图5 方位为30°的回波信号水平、垂直方位走向

图6 方位为90°的回波信号水平、垂直方位走向

图7 方位为120°的回波信号水平、垂直方位走向
从上面的分析和图形来看,鱼雷双维尺度靶标不单在水平方向有一定范围的方位走向,在垂直方向也有一定范围的方位走向角[10],而对于拖曳线列阵的一维声靶,只有水平方向的方位走向,垂直方位走向值是0。由此得知方位走向法是一种颇为有效的目标识别方,在有利的目标识别阵位上可以提取出相当理想的方位走向曲线,而双维尺度声靶能够有效地对抗智能鱼雷对目标的尺度识别,相较于单亮点或一维线列阵靶标,双维尺度靶标在对智能鱼雷尺度识别方面的水声对抗能力具有很明显的优势。
4结语
本文根据双维尺度声靶模型,对一种具有声基阵的智能鱼雷的接收单元进行模拟分析,设置仿真条件,对鱼雷声基阵接收到的双维尺度声靶回波信号进行了仿真,用方位走向法分析了鱼雷双维尺度声靶回波信号的尺度特性,结果表明,方位走向法是一种有效的尺度识别方法,能够对水下目标的纵横尺度进行有效的识别,而双维尺度声靶能够更加逼真的模拟水下目标的尺度特性,增强了靶标应对鱼雷尺度识别的能力,从而能够使水下靶标在试验和未来战场的水声对抗中发挥更重要的作用。
参 考 文 献
[1] 周明,初磊,朱慧,等.一种反潜声自导鱼雷目标尺度识别方法研究[J].弹箭与制导学报,2008,28(5):237-240.
[2] 徐瑜,赵军,苑秉成.基于方位走向的潜艇亮点分布特征提取与仿真[J].鱼雷技术,2012,20(6):419-423.
[3] 刘朝晖,付战平,王明洲.基于方位走向法和互谱法的水中目标识别[J].兵工学报,2006,(5):932-935.
[4] 易红,周殿宝,陈春玉,声自导鱼雷进行尺度目标识别的试验方法研究[J].鱼雷技术,2005,13(4):50-53.
[5] 高守勇,孙兵.单片机在水声通讯中的应用[J].声学技术,2001,20(4):180-182.
[6] George W, Wolf jr. U.S. Navy Sonobuoy-Kgy to antisubmarine warfare[J]. Sea Technology,1998.
[7] Dr Graham Holt. The nature of the littoral environment and the shifting emphasis towards shallow water weapons[J]. Submarines and Anti-Submarine Warfare,1998.
[8] 胡友峰,景博,孙进才.一种水下被动目标运动分析与仿真[J].声学技术,2001,20(4):157-161.
[9] P Thomson moron. TMA from bearmg and multinath time delays[J]. IEEE Transactions on Aerospace and Electronic Systems,1997(3):812-824.
[10] Claude Jaufferet, Denis pillon. Observatiluy in passive target motion analysis[J]. IEEE Transactions on Aerospace and Electronic Systems,1996(4):1290-1300.
中图分类号TB391
DOI:10.3969/j.issn.1672-9730.2016.02.037
作者简介:武鹤龙,男,助理工程师,研究方向:水下靶标。潘明,男,硕士,助理工程师,研究方向:水下靶标。
*收稿日期:2015年8月1日,修回日期:2015年9月25日
