基于WiFi的智能停车场系统的设计与实现
2016-03-12武汉纺织大学经济学院周昌龙
武汉纺织大学经济学院 周昌龙
基于WiFi的智能停车场系统的设计与实现
武汉纺织大学经济学院 周昌龙
随着车辆的飞速增长,停车难的问题越来越突出,提高停车效率和停车场的利用率是发展的必然趋势。论文设计并实现一种基于WiFi的智能停车场系统,它是一种基于WiFi定位技术的指纹识别系统,采用分枝定界法的快速近邻算法,减少了计算量,并且开发了一套手机终端应用软件和服务器端软件。该系统可以实时显示停车场车位信息,停车场内停车导航和寻车导航等功能。既可以节省车主的时间,提高停车场的利用率,同时也可以使停车场内部的交通流更加有序和通畅,从而加速停车场的运转和提高整个停车场的效率。
智能停车场系统;WiFi定位;快速近邻算法;停车导航;寻车导航
0 引言
随着经济的发展,生活质量的提高,城市中的汽车越来越多,导致许多城市出现了停车难和乱停车的现象。公安部日前公布,去年底全国机动车保有量已达24亿辆,车辆的飞速增加给城市的公共管理带来压力与挑战,城市停车服务已经严重考验一个城市的公共服务能力。面对汽车时代的来临,寻找停车场和停车位的困难,进出停车场的麻烦和停车位供应不足的问题将越来越突出。智能停车场系统是必然的发展趋势,对智能停车场系统进行研究和提出设计方案是非常有意义的。
本文提出一种停车场实时定位的技术。目前大部分的停车场都是地下停车场,传统的GPS(Global Positioning System)能很好的解决室外定位的问题,但是在室内卫星信号容易受到各种障碍物的遮挡。目前室内定位技术主要有射频识别(Radio Frequency Identification, RFID)[1]、 Zigbee[2]、 超声波(Ultrasonic)[3]、超宽带(Ultra Wide Band, UWB)[4]、蓝牙(Bluetooth)[5]和WiFi。基于WiFi的室内定位相比其他定位技术,成本低,易于部署,且应用广泛,具有很大应用空间。在目前的基于WiFi的室内定位系统中,绝大多数都是基于RSS(Received Signal Strength),其方法主要分为三角定位算法[6]和指纹识别算法[7]。三角定位算法只要是基于信号传播的衰减模型来定位,但是室内的环境比较复杂,信号在室内传播过程中容易受到非视距传播,多径传播和阴影效应的干扰,很难获得准确的衰减模型,并且不同的环境衰减模型不同。指纹识别算法是一种基于指纹数据库的匹配定位算法。通过建立定位区域信号强度的指纹数据库,然后再与实时采集的信号强度进行匹配来达到位置估计的目的。在实际的测试中,指纹识别算法相对于三角定位算法,具有较高的定位精度。
因此,我们提出了一种基于WIFI的智能停车场系统,并且提出了采用分枝定界的快速紧邻算法应用于WiFi定位技术中,该系统可以实时显示停车场车位信息,停车场内车位导航和寻车导航等功能。既可以节省车主的时间,提高停车场的利用率。同时也可以使停车场内部的交通流更加有序和通畅,从而加速停车场的运转和提高整个停车场的效率。
1 系统设计
基于WIFI的智能停车系统主要通过手机客户端和后台服务进行交互实现相应的功能。主要分为:手机客户端,数据库服务器,定位服务器和车位显示模块。手机客户端主要作用是采集实时WiFi信号强度、发送相应的定位请求和将服务器反馈回来的信息反映到地图上;数据库服务器对系统数据进行管理和监控,数据包括:路由器设备信息、指纹地图、车位信息和地图信息;定位服务器主要是用来接收客户端请求并进行定位计算和导航计算,并将结果推送给手机客户端;车位显示模块通过超声波车位检测模块将车位信息反馈到数据库服务器,并显示在LED显示屏上。系统实现的停车导航和寻车导航的功能,通过手机客户端获取到信号强度和设备MAC地址,并将这些信息作为请求信息发送给定位服务器,定位服务器通过定位算法计算当前位置并根据请求类型读取数据库信息查找出合适的导航路线,将路线结果返回给客户端。整个系统所用的数据通过车位显示模块和数据库服务器获取。
2 定位原理及算法设计
2.1 定位原理
随着国内外大城市的WiFi热点部署不断增加,利用WiFi信号进行室内定位变得更具有可操作性。因而在定位信号的选择中,可采用WiFi信号强度作为位置定位的基础。在理论上,无线信号在自由空间内传播距离后,接受信号强度可表示如下式:

式中:Pr为接受点的的信号强度;P0为接受点的参考距离;n为路径损耗指数,由环境因素决定;Xσ是服从高斯正太分布的随机数。
由于信号传播中的干扰因素,无线信号传播衰减模型很难的表征距离和信号强度间的映射关系,而基于指纹识别的定位算法在复杂的环境中的定位精度一般高于基于衰减模型的定位算法,所以本系统采用指纹识别算法。
2.2 定位算法
2.2.1 离线训练阶段
在离线训练阶段主要是采集定位停车场中的参考点的信号强度。由于移动终端在不同方向接收同样的信号强度是有差异的,所以本系统根据停车场的行车方向,在每一个参考点采集两个不同方向的指纹信息。指纹地图。
2.2.2 在线定位阶段
在线定位阶段只要是把实时采集到的信号强度与指纹地图中的数据进行匹配得到定位位置估计。首先将实时采集到的信号强度与样本子集的均值进行对比得到最小差值的样本集,然后再对样本集中的数据对应的坐标取平均值来得到位置估计。
2.3 快速最近邻算法
算法可以分为两个阶段:第一个阶段是将指纹数据库分级分解,形成树结构。第二个阶段用搜索算法找出实时测量信号强度的最近邻。
第一阶段:指纹数据库的分解。
首先将指纹地图分为m个子集,每个子集再分成m个子集。这样依次下去就可以得到一个树结构,每个节点都对应一群指纹数据,用p来表示这样一个节点,其他的参数表达含义如下所示:
Np:中的指纹个数;
Mp:指纹子集的指纹RSS均值;
D(r(o),Mp):表示r(o),Mp之间的差值;
r(o):表示实时测量的信号强度值;
Mp:表示中的样本均值;
rp:表示Mp到的最大差值。
第一阶段: 搜索阶段。
在搜索阶段中需要使用以下两个规则来检验未知点是否在中。
为了减少计算量,避免对最终节点中所有的指纹样本Xi计算D(X,Xi)距离,所以引出规则2。
3 系统试验测试
3.1 试验平台的搭建
为了验证提出的基于WiFi的智能停车场系统,在武汉纺织大学阳光校区3栋教学楼地下停车场搭建了实验环境。在停车场内我们部署了5个TP-LINK TL-MR10U的无线路由器来搭建WiFi环境,并且选取了28个参考点进行了定位导航实验。数据库管理服务器和计算服务器我们采用了2台DELL OPTIPLEX 990台式机,在定位过程中我们使用安装有我们开发的手机应用的三星GALAXY SIII手机作为移动终端。
3.2 手机客户端软件实现
手机客户端的Android开发平台是JDK1.6.0_43和Android SDK 4.4,编程工具采用Eclipse 4.2.0,测试手机为三星GALAXY SIII。停车导航和寻车导航通过请求将当前定位信息发送给后台定位服务器,服务器读取数据库信息寻找最优路径。最后通过退出按钮,关闭客户端,暂时离开停车场,停车位置信息仍然会保留在数据库中。实物图如图 1所示:
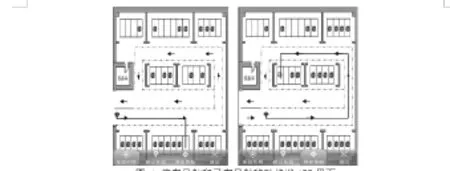
图1 停车导航和寻车导航移动终端APP界面
4 结论
本文设计并实现了一种基于WiFi的智能停车场系统,提出了采用分枝定界法的近邻快速算法应用于定位中,在一定程度上减少了定位的计算量。并开发了移动客户端软件和服务器端后台管理界面。在试验中,该系统可以实时显示停车场车位信息,停车场内车位导航和寻车导航等功能,是一种集成移动终端和网络服务器交互的高智能实时查询和导航系统,具有极大的市场价值和应用前景。
[1]HOLM S.Hybrid ultrasound-RFID indoor positioning: Combining the best of both worlds[C]//RFID,2009 IEEE International Conference on.IEEE,2009:155-162.
[2]HU X,CHENG L,ZHANG G.A Zigbee-based localization algorithm for indoor environments[C]//Computer Science and Network Technology(ICCSNT),2011 International Conference on.IEEE,2011,3:1776-1781.
[3]HAZAS M,HOPPER A.Broadband ultrasonic location systems for improved indoor positioning[J].Mobile Computing, IEEE Transactions on,2006,5(5):536-547.
[4]DE ANGELIS A,DWIVEDI S,HANDEL P.Characterization of a flexible UWB sensor for indoor localization[J].2013.
[5]张浩,赵千川.蓝牙手机室内定位系统[J].计算机应用,2011,31(11): 3152-3156.
[6]HE J,LI S,PAHLAVAN K,et al.A realtime testbed for performance evaluation of indoor TOA location system[C]//Communications (ICC), 2012 IEEE International Conference on.IEEE,2012:482-486.
[7]TIAN Z,TANG X,ZHOU M,et al.Fingerprint indoor positioning algorithm based on affinity propagation clustering[J].EURASIP Journal on Wireless Communications and Networking,2013,2013(1):1-8.

图3 实验结果
5.结论
本文借助于空间填充曲线的研究成果,提出了大数据背景下针对海量移动目标轨迹的热点区域挖掘算法。该算法采用Z曲线把二维轨迹数据降至一维,有效规避了二维空间数据的复杂计算,且通过修改逼近次数可灵活改变网格的大小以适应不同移动目标轨迹的特点。在此基础上,通过更深入的研究可扩展大数据技术在对移动目标轨迹聚类、伴随模式挖掘、分类等方面的应用。
参考文献
[1]Lee J G,Han J,Li X.Trajectory Outlier Detection:A Partitionand-Detect Framework[J].2008:140-149.
[2]Jeung H,Yiu M L,Zhou X,et al.Discovery of Convoys in Trajectory Databases[J].Computer Science,2010,1(1):1068-1080.
[3]Yang Y,Cui Z,Wu J,et al.Trajectory analysis using spectral clustering and sequene pattern mining[J].Journal of Computational Information Systems,2012,8(6):2637-2645.
[4]Giannotti F,Nanni M,Pinelli F,et al.Trajectory pattern mining[C]//ACM SIGKDD International Conference on Knowledge Discovery and Data Mining.ACM,2007:330-339.
[5]Qu Z,Dorsey J F,Dawson D M.Model reference robust control of a class of SISO systems[J].IEEE Transactions on Automatic Control,1994,39(11):2219-2234.
[6]H.Ambrose,Z.Qu.Model reference robust control for MIMO systems[J].International Journal of Control,1997,68(3):345-349 vol.1.
[7]Mokbel M F,Aref W G,Kamel I.Analysis of Multi-Dimensional Space-Filling Curves[J].GeoInformatica,2003,7(3):179-209.
[8]Moon B,Jagadish H V,Faloutsos C,et al.Analysis of the Clustering Properties of the Hilbert Space-Filling Curve[J].IEEE Transactions on Knowledge & Data Engineering,2001,13(1):124-141.
[9]Mokbel M F,Aref W G.Irregularity in Multi-Dimensional Space-Filling Curves with Applications in Multimedia Databases[C]// ACM CIKM International Conference on Information and Knowledge Management,Atlanta,Georgia,Usa,November.2001:512-519.
[10]刘胤田,唐常杰,曾涛,等.基于空间填充曲线的数据分发区域匹配[J].系统仿真学报,2007,19(4):780-783.
作者简介:
张鲁斌(1985—),山东曲阜人,硕士,工程师,主要研究方向:网电空间测控。
周昌龙(1990—),男,湖北汉川人,硕士,现就职于武汉纺织大学经济学院。
