锂离子蓄电池恒压补充电方法研究
2016-03-11张小乾王顺利尚丽平李占锋刘力舟
张小乾, 王顺利*, 尚丽平, 李占锋, 刘力舟
(1.西南科技大学信息工程学院,四川绵阳621010;2.西南科技大学制造科学与工程学院,四川绵阳621010)
锂离子蓄电池恒压补充电方法研究
张小乾1, 王顺利1*, 尚丽平1, 李占锋2, 刘力舟1
(1.西南科技大学信息工程学院,四川绵阳621010;2.西南科技大学制造科学与工程学院,四川绵阳621010)
针对锂离子蓄电池健康充电目标,探索了一种锂离子蓄电池恒压补充电方法。该方法结合锂离子蓄电池充电管理过程,基于反馈控制思想,实现了锂离子蓄电池的恒压补充电。该方法在研制的机载蓄电池地面维护设备中探索应用,应用于锂离子蓄电池的充电维护、循环充放电活化过程。实验结果表明,该方法在充电过程中,能够较好地实现恒压补充电,充电速率较原有限压补充电方式提高20%。在补充电时,锂离子蓄电池温度保持在合适范围内,充电效率和充电时间等参数得到有效提高。该方法对锂离子蓄电池使用寿命的延长有一定促进作用。
电池维护;锂离子蓄电池;补充电;反馈;活化
近年来,由于能量密度高,循环寿命长,锂电池已被公认为最具潜力的新型电池,尤其是钴酸锂,具有容量大、体积小的特点,同容量情况下,锂离子蓄电池比镉镍蓄电池的质量少40%~60%(功率型质量相对较大,质量相对减少约40%;能量型质量相对较小,质量减少约60%),在航空等领域得到探索性应用。
锂离子蓄电池组的健康、快速充电是其机载应用的重点和难点之一。蓄电池的性能反馈检测与安全快速充电技术研究在国际和国内已经引起了很大的兴趣,研究的蓄电池涵盖了铅酸蓄电池、镉镍蓄电池、锂离子蓄电池等,国内外的研究机构和高校已展开对蓄电池的持续研究,如宾州州立大学、美国南卡大学、大连化物所、清华大学、北京航空航天大学、广五所、西南科技大学等对锂离子蓄电池组充放电控制、均衡调节、状态估算等方面进行了深入研究,在Journal of Power Sources[1]、电源技术[2]、电源学报[3]、IEEE Transactions on Power Electronics[4]、电子技术应用[5]等国内外期刊[6-9]中均有相关学术研究成果发表。针对锂离子蓄电池健康、快速补充电问题,在研究现有方法的基础上,结合反馈控制思想,提出了一种锂离子蓄电池补充电方法。该方法在已自主研制的机载蓄电池地面维护设备中得到探索性应用,并取得良好效果。
1 恒压补充电模型建立
1.1 反馈式恒压补充电原理
基于反馈控制思想提出的锂离子蓄电池恒压补充电方法,通过把电池中的电压、温度信号作为反馈量,基于串级控制思想,实现恒压补充电目标。在处理过程中,使用两级PID控制,设计两个二阶线性控制器,通过调整比例参数(P)、积分参数(I)和微分参数(D)达到良好的闭环控制性能目标。设计PID控制器状态方程为:

设计的状态方程是连续的,然而在模型实现过程中,连续采样无法实现,采用定时采样的策略,进而设计离散的PID控制模型。


构建如式(2)和式(3)这种位置式PID控制方法,其当前采样时刻的输出与过去的状态有关,在计算时须对进行累加,计算费时较长,并且占用内存较大,在此基础上改进为增量PID控制算法,由式(3)可得出前一时刻的输出量如式(4)所示。



为了便于程序模型构建,对式(6)进行改写,构建基础模型如式(7)所示。

这样,构建的PID增量式算法在位置式算法上面做了少量改进,使得构建的模型具有以下优点:(1)计算机只输出增量,误动作时影响小,必要时可增设逻辑保护;(2)算式不需要累加,占用内存少,计算方便。采用PID增量式算法可以减少系统的运算量,占用内存少,并且不容易出现错误,在计算过程中只需记忆前一时刻和当前时刻的输出值。
增量式控制算法是建立在离散PID控制算法上的,仍存在采样周期的选择问题。从理论上来说,采样周期的选值越小,系统就会越接近连续系统,使得系统控制品质得到保证。但是采样周期如果过小,执行机构会来不及响应,抗干扰性能就低,达不到控制要求。因此选择采样周期时,既要考虑计算机所承担的工作量,又要考虑设计所要求的控制品质以及执行器的响应速度。其值的选择既不宜过大,又不宜过小。一般来说温度控制系统的采样周期为15~20 s,但是本系统的主要扰动为电池电压,对于电压来说,其波动量大,采样周期一般为1~2 s。另一方面,本补充电模型的回路只有两个,所以计算工作量也并不大,故本次设计选择的周期为1 s,在确保计算机工作量不太大的前提下,保证恒压补充电的控制品质。
1.2 恒压补充电模型建立
在本次设计中,从宏观上来说,PID增量式算法的实现是用两个PID模块串联使用实现的。首先将系统的设定值与主对象的实际值进行比较,得到的差值作为第一个PID控制器的输入信号,第一个PID控制器对输入信号进行运算后的输出信号作为副对象的设定值,此设定值与实际值进行比较得到的偏差作为第二个PID控制器的输入信号,通过输出结果调节副对象,达到使用增量式算法稳定控制主对象的目的。
1.2.1 基础控制模型构建
构建单个增量式PID控制器的模型,通过对位置式PID算法的输出增量计算已经得出,如式(4)所示。由此建立增量式PID控制器,PID控制器的输入值为实际值与设定值的偏差。
把三个支路进行汇总相加得到总输出如式(8)所示。

1.2.2 补充电模型构建
通过比较与设计,将PID算法设计与串级控制设计结合,获得PID串级控制系统,实现锂离子蓄电池恒压补充电目标,进而在Simulink中构建补充电恒压控制回路模型,实现模型构建与实验分析,设计框图如图1所示。
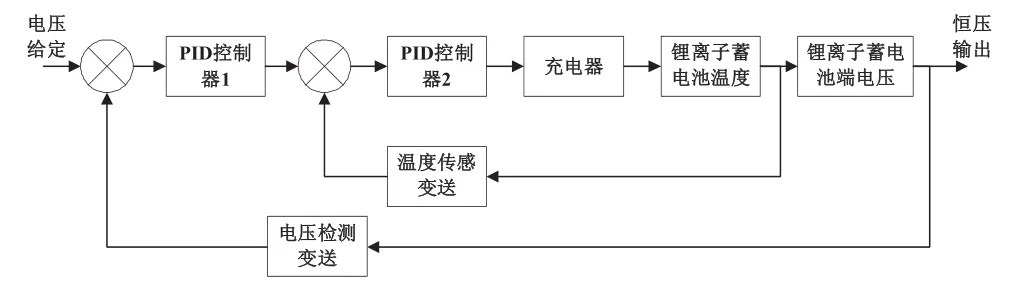
图1 恒压补充电串级控制框图
2 结果与分析
通过在Simulink中进行模型构建和参数整定,确立锂离子蓄电池恒压补充电模型,进而用于研制设备补充电实验验证与现场应用。
2.1 实验结果
在参数整定过程中,本模型构建采用两步整定法对该锂离子蓄电池恒压补充电串级控制系统模型参数进行整定。通过副回路参数、主回路参数、主副回路参数的整定过程最终确定模型中的未知参数。
2.1.1 副回路参数整定与分析
将主回路和副回路均设为闭环,设置主控制器的比例参数为100%,积分时间为最大,微分时间为0,然后按4∶1衰减曲线法整定副回路的比例度和衰减周期。通过整定,当=5时,曲线比较理想,由其响应输出分析可知,调节过程的衰减周期为=2,比例度为。
2.1.2 主回路参数整定与分析
将副控制器的比例参数置为5,再把积分时间调为最大,微分时间调为0,同样按4∶1衰减曲线法整定主回路的比例度和衰减周期。通过整定,当=10时,其响应曲线呈4∶1衰减,调节过程的衰减周期为=2.5,比例度为
2.1.3 主副回路参数整定与分析
通过主副回路的参数整定,确定各个子模块的参数,接下来对主回路和副回路参数进行综合整定。
按所得到的主回路和副回路的比例度和衰减周期,采用4∶1衰减曲线法的经验公式,分别求取主调节器和副调节器的比例度、积分时间和微分时间,根据经验公式可计算出主调节器和副调节器的PID参数。
主调节器PID参数的计算如式(9)所示:

为了减少系统波动,副调节器采用P调节器或者PI调节器,分别计算出两种调节器的各项参数,然后再通过实验进行比较选择出最优方案。当副调节器为P调节时:;当副调节器为PI调节时:
当副调节器为P调节器时,将主调节器和副调节器的PID参数设置为上一步骤所求得的参数,得到响应曲线调节时间过长,故再对主调节器和副调节器的PID参数进行微调,当时,输出响应曲线比较理想,如图2所示。

图2 副调节器为P调节器的响应曲线
当副调节器为PI调节器时,将主调节器和副调节器的PID参数设置为上一步骤所求得的参数,得到响应曲线超调过大,故再对主调节器和副调节器的PID参数进行微调,当时,响应曲线比较理想,如图3所示。

图3 副调节器为PI调节器的响应曲线
从参数上对单回路控制系统和串级控制系统进行性能比较,得到对比结果如表1所示,当副调节器为PI调节器时,其调节时间由55 s减少到37 s,其超调量由50%减少到30%,动态性能比副调节器为P调节器时更好,所以选择副调节器为PI调节器。

表1 副调节器不同调节方案的阶跃响应性能指标
2.2 结果分析
2.2.1 动态性能分析
将副调节器去掉,采用单回路控制系统,比较两种系统的控制性能,其单回路控制系统通过切换手动开关来实现副回路PI控制器的引入与切除,其仿真框图如图4所示。
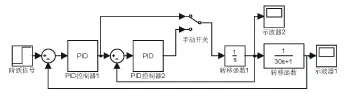
图4 仿真框图
当把手动开关打到上面的接触点时,当前控制系统为单回路控制系统,通过不断调节参数,当时,其响应输出曲线最为理想,如图5所示。

图5 单回路控制系统响应曲线
从参数上对单回路控制系统和串级控制系统进行性能比较,得到结果如表2所示,构建的串级恒压补充电控制系统相对于单回路控制系统来说,性能有很大的提升。无论是从超调量还是调节时间来看,串级控制系统的优越性能都是显而易见的。
Lithium-ion battery constant voltage supplementary charge method
Aiming at the healthy charging goal of lithium-ion battery,a constant voltage supplementary method for lithium-ion battery was explored.Combined with the lithium-ion battery charging management process,the constant supplementary charging for lithium-ion battery was achieved based on the feedback control theory.The method was used for exploration applications in ground maintenance equipment of the developed airborne battery,applying for the lithium-ion battery charging maintenance,activating charge and discharge cycles.The experimental results show that the method is able to achieve better constant supplementary charge in the charging process,in which the charging rate is increased by 20%than the original limited-voltage supplementary charging way. When supplementary changing the battery,the battery temperature is maintained within an appropriate range,and the charging efficiency, the charging time and other parameters are improved effectively. The method has a certain role to extend the lithium-ion battery life.
battery maintenance;lithium-ion battery;supplementary charge;feedback;activation
TM 912
A
1002-087 X(2016)04-0820-03

2015-09-26
四川省科技厅项目(2014GZ0078);绵阳市科技局项目(15G-03-3)
张小乾(1987—),男,河南省人,讲师,主要研究方向为控制科学与工程,无线电技术。
王顺利,E-mail:497420789@qq.com
