一种新型井下自动上卸料装置
2016-03-04李艾民陈飞彭茜
李艾民, 陈飞, 彭茜
(中国矿业大学 机电工程学院, 江苏 徐州 221116)
一种新型井下自动上卸料装置
李艾民,陈飞,彭茜
(中国矿业大学 机电工程学院, 江苏 徐州221116)
摘要:针对井下喷浆支护过程中,混凝土干拌物进入搅拌机的过程因采用人工上料方式而导致效率低的问题,通过分析现有自动上卸料装置结构,提出了一种新型井下自动上卸料装置,重点介绍了该装置的结构设计。该装置采用履带行走机构,能够随搅拌机移动;采用闭合抓斗,减少了粉尘;自动进行上卸料工作,有利于提高支护效率。
关键词:喷浆支护; 自动上卸料装置; 自动上料; 自动卸料
0引言
目前矿山井巷主要采用喷浆支护方式。该方式利用压缩空气将水泥砂浆以较高的速度喷射到岩体表面,凝结硬化后形成支护[1]。传统喷浆工艺流程中,由人工完成从矿车内卸料至料场、拌料、再次上料至矿车等工作,劳动强度大,工作效率低,严重影响支护施工的速度和喷浆质量。本文提出一种能够代替人工上料的自动上卸料装置,大大提高了喷浆支护的效率和质量。
1现有自动上卸料装置分析
某矿用自动上料喷浆机采用升降式采料装置[2]。图1为采料装置侧面。该采料装置通过链轮使12个挖斗不断旋转来进行取料、卸料,采用升降油缸解决取料面下移问题。整个装置由液压马达驱动。在取料过程中,随着矿车中混凝土干拌物不断减少,升降油缸驱动升降支架下移,挖斗抓取矿车内的混凝土干拌物。内外压链轮用于在升降支架位置变化时调节链条的张紧状态。该采料装置每个挖斗取料质量小、次数多,无法从根本上解决取料过程中粉尘飞扬的难题;不能将依附在侧壁的混凝土取出,且取料机构与矿车底部的协调性不足,无法将物料完全取出;没有行走机构,导致装置无法随喷浆机即时移动,效率提升不明显。

1-被动链轮; 2-链条; 3-挖斗; 4-升降油缸; 5-回转支承;
图2为某现有矿用自动上卸料装置[3]。该装置采用一个大抓斗抓料,通过纵向平移机构、横向平移机构和竖直伸缩机构实现抓斗取、卸料过程。该装置的抓斗机构包括左挖斗、右挖斗、销轴和挖料油缸,左、右挖斗通过销轴连接,销轴侧面固定在竖直伸缩油缸活塞杆端部,挖料油缸两端分别与左、右挖斗连接。竖直伸缩机构通过竖直伸缩油缸来实现伸缩。该装置可在一定程度上解决人工上料粉尘多、耗资大、效率低等问题,但其液压支腿的爬坡能力较弱,且支撑机构的规格导致该装置只适用于固定巷道的施工现场。
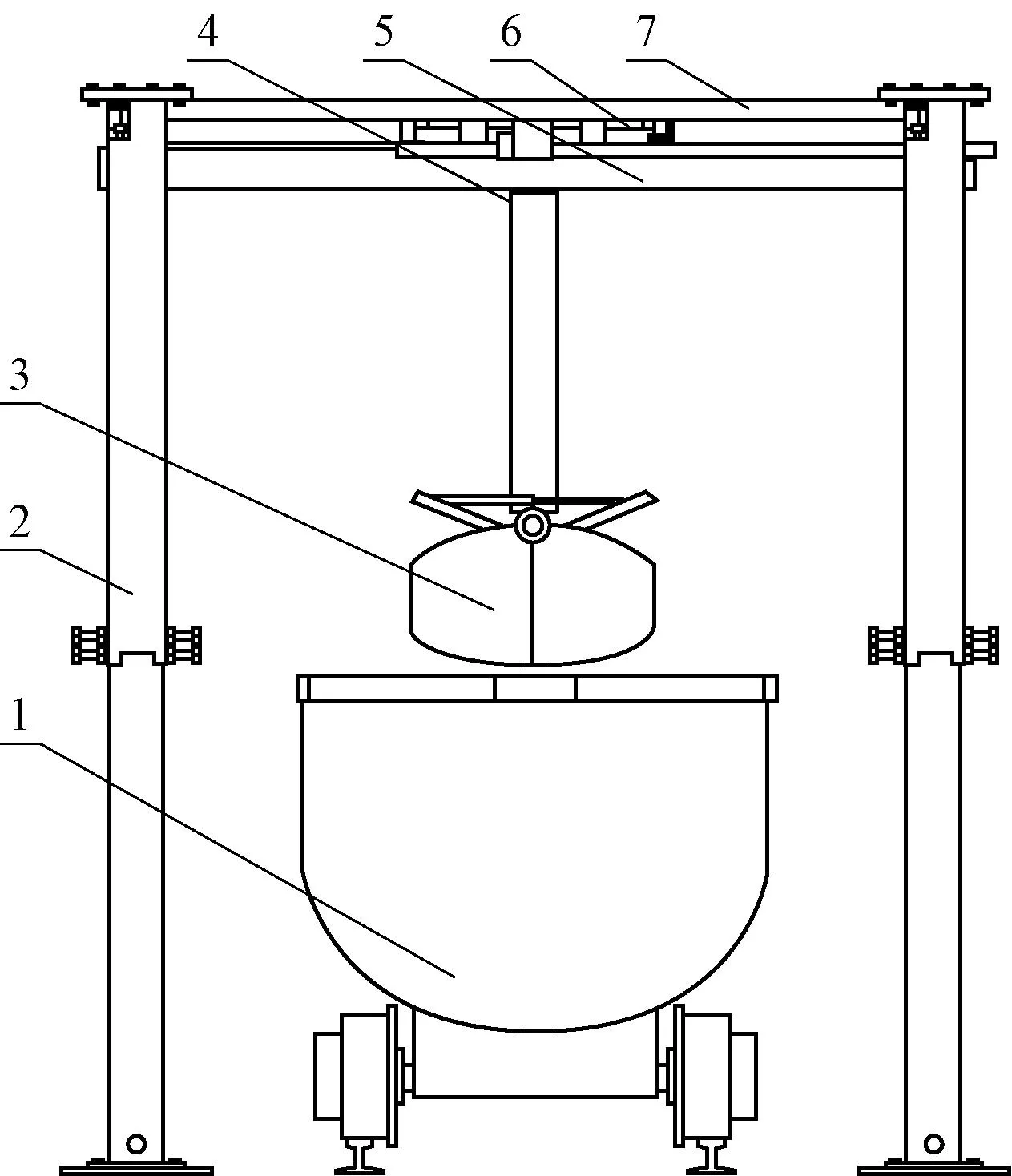
1-矿车; 2-支撑机构; 3-抓斗机构; 4-竖直伸缩机构;
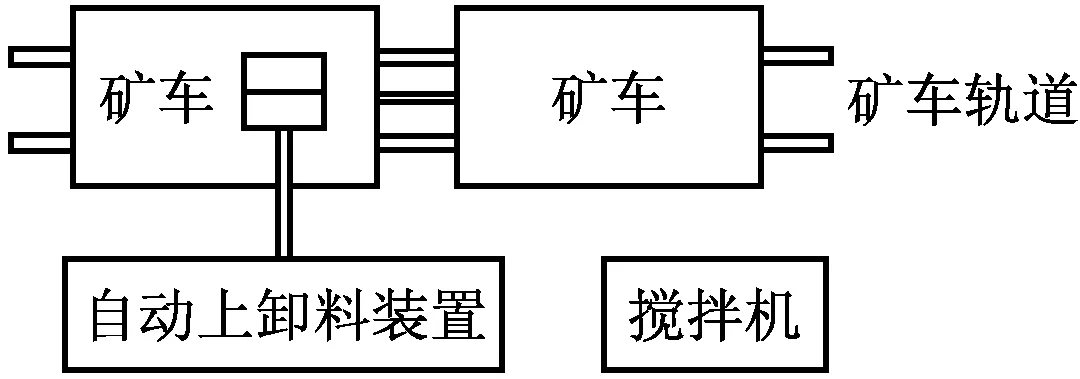
2新型井下自动上卸料装置工作原理
新型井下自动上卸料装置适用于狭小巷道,能够代替人工将矿车里的混凝土干拌物取出,然后卸料放入搅拌机,并将干拌物与水按照一定比例混合并搅拌,为喷浆机提供原料。该装置工作时将抓斗旋转到矿车轨道上,将抓斗下降,然后打开抓斗抓取物料;再将抓斗提升,旋转到搅拌机轨道上;打开抓斗,开始放料。装置行走时如图3(a)所示,抓取混凝土干拌物时如图3(b)所示,卸料时如图3(c)所示。

(a) 行走
(b) 取料

(c) 卸料
3新型井下自动上卸料装置结构设计
3.1总体结构
新型井下自动上卸料装置由动力源、传动系统、旋转机构、升降机构、抓斗机构、行走机构组成,其结构如图4所示。动力源用来给整个装置提供动力;传动系统控制装置各机构之间协调工作;旋转机构控制抓斗机构旋转,使抓斗机构从矿车旋转至搅拌机轨道上;升降机构控制抓斗机构升降,使抓斗机构能够伸入矿车内部取料;抓斗机构是整个装置的执行机构,实现抓料、取料功能;行走机构使整个装置能够随搅拌机移动。
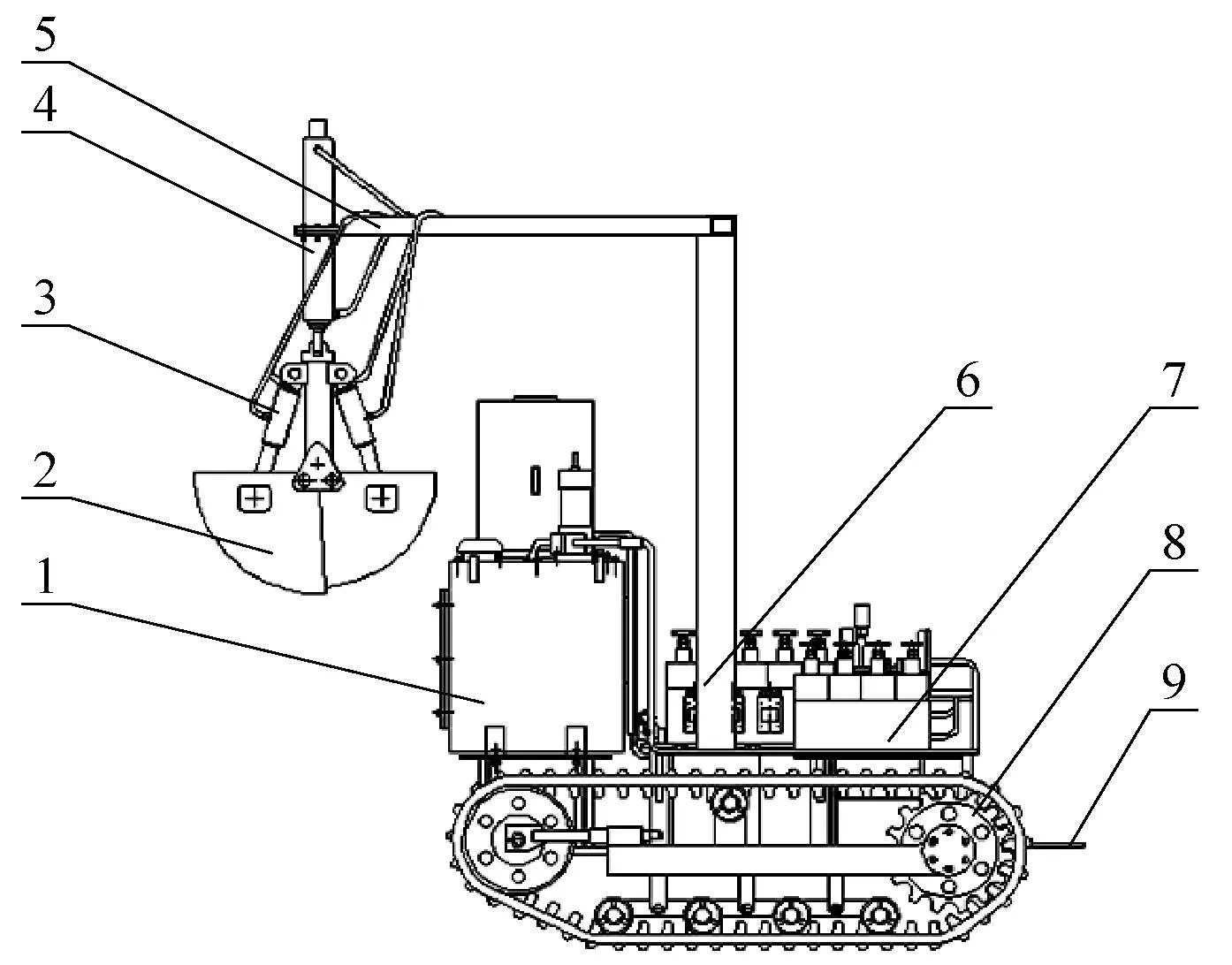
1-泵组; 2-抓斗; 3-抓斗油缸; 4-升降油缸; 5-槽钢;
3.2动力源
井下工作空间受限,温度较低。防爆柴油机体积较大,价格较昂贵,且在低温时较难启动。而电动机使用方便,在工作过程中不会产生烟尘、气味,也不会污染环境,噪声较小,因此选择防爆电动机为动力源,采用蓄电池为电动机供电。防爆电动机型号为ZBQ-7.5,额定转速为1 100 r/min。
3.3传动系统
井下传动系统一般采用机械传动系统、液力机械式传动系统和液压传动系统。受井下空间和环境条件的限制,传动系统必须结构紧凑、能自动控制、物理尺寸小[4]。液压传动系统的体积相对较小,且传递能力很大;传动时机器很平稳,反应速度快,冲击很小;工作时无需添加其他元件即可实现无级调速,大大简化了机械结构[5]。因此装置采用液压传动系统。电动机驱动液压泵产生压力油,带动液压马达、摆动液压缸、三级液压缸和单级液压缸,控制整个装置运行。其中液压马达控制行走机构行走、制动、减速和转弯。在井下小巷道工作时,摆动液压缸的旋转角度为90°,控制抓斗机构从巷道垂直方向旋转至巷道平行方向。三级液压缸的最大伸长距离大于矿车高度即可。2个单级液压缸并联控制2个抓斗叶片的张开与闭合。
3.4旋转机构
旋转机构由摆动液压缸控制来实现90°或180°转弯。摆动液压缸往复运动,带动齿轮轴正反向摆动旋转,液压缸的往复推力转换为齿轮轴的输出转矩。液压泵向摆动液压缸提供压力油。在井下小巷道内工作时,摆动液压缸需转动90°来移动抓斗机构。在地面上工作时,根据搅拌机与混凝土干拌物的放置位置不同,摆动液压缸有时需旋转180°来完成上卸料工作。
3.5升降机构
升降机构需承受所抓取物料的重力,实现简单的上下移动。在井下工作时,升降机构由三级液压缸来实现升降。三级液压缸在收缩时轴向长度较短,占用空间较小,结构紧凑,适应井下恶劣环境。液压泵控制三级液压缸收缩,当三级液压缸伸长时,抓斗机构伸入矿车内部抓取物料;当三级液压缸收缩时,抓斗机构将物料从矿车取出。三级液压缸的进出油口均连接平衡阀实现保压,防止三级液压缸因转动惯性导致旋转角度大于90°。另外,三级液压缸的进出油口连接安全阀,以防止误操作。
3.6抓斗机构
抓斗机构由2个并联的单级液压缸、2个抓斗叶片、销轴、销和支架组成,如图5所示。抓斗叶片的张开和闭合由并联的单级液压缸控制。单级液压缸伸长时,2个抓斗叶片闭合取料;单级液压缸收缩时,2个抓斗叶片张开卸料。该抓斗机构的特点:① 2个抓斗叶片闭合时中间设置一块重合的长度,防止结合处混凝土干拌物掉落;② 抓斗叶片闭合时底部的弧线为半圆弧线(与矿车底部形状相同),使取料更加完全;③ 2个并联液压缸同时控制抓斗叶片,使抓斗叶片推力更大,稳定性更好;④ 采用耐磨材料。

1-抓斗叶片; 2-销轴1; 3-支架; 4-销轴2; 5-单级液压缸
3.7行走机构
行走机构采用履带行走机构,由液压马达、履带板、驱动轮、导向轮、支重轮和托链轮组成。液压马达为整个行走机构提供驱动力矩;履带板是用连接销连接起来的封闭环,通过传送牵引力使整个装置运行;驱动轮为齿块式,满足回转轻快、传动效率高、耐磨损的要求;导向轮轮缘无齿,起导向作用,兼有部分支承作用;支重轮起支承作用;托链轮用来承托履带链,防止履带下垂[6]。
4结语
新型井下自动上卸料装置采用履带行走机构,能够适应各种复杂工况;通过闭合的抓斗将混凝土干拌物取出和放下,很大程度上减少了粉尘的产生;代替人工作业,提高了喷浆效率,降低了施工成本。
参考文献:
[1]薛顺勋, 聂光国, 姜光杰,等. 软岩巷道支护技术指南[M]. 北京: 煤炭工业出版社, 2001: 48-52.
[2]王锟, 尚玉征, 刘昊. 矿用自动上料混凝土喷射机用升降式采料装置:中国, 201220462235.9[P]. 2012-09-12.
[3]陈飞, 李艾民, 张文娟. 一种矿用自动装卸料装置:中国, 201320114905.2[P]. 2013-03-14.
[4]石博强, 饶绮麟. 地下辅助车辆[M]. 北京: 冶金工业出版社, 2006: 38.
[5]许福玲, 陈尧明. 液压与气压传动[M]. 北京: 机械工业出版社, 2007: 4-5.
[6]安东诺夫. 履带行驶装置原理[M]. 魏宸官, 译. 北京: 国防工业出版社, 1957: 47-53.
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160126.1541.004.html
A new type of underground automatic loading and unloading device
LI Aimin,CHEN Fei,PENG Xi
(School of Mechatronic Engineering, China University of Mining and Technology,
Xuzhou 221116, China)
Abstract:For low efficiency caused by manually putting dry concrete material into pug mill during underground guniting support, a new type of automatic loading and unloading device was proposed by analyzing structures of existing automatic loading and unloading devices, and structure design of the device was introduced in details. The device uses caterpilar belt running gear to move following pug mill, adopts closed clam bucket to reduce dust, and loads and unloads concrete material automatically, so as to improve supporting efficiency.
Key words:guniting support; automatic loading and unloading device; automatic loading; automatic unloading
作者简介:李艾民(1965-),男,江苏邳州人,教授,硕士,研究方向为虚拟样机,E-mail:liaimin@cumt.edu.cn。通信作者:陈飞(1967-),女,浙江嵊州人,副教授,博士,研究方向为机电液一体化和现代机械设计理论及方法,E-mail:cfcumtxz@126.com。
基金项目:江苏省产学研联合创新资金前瞻性联合研究项目(BY2014028-04)。
收稿日期:2015-10-28;修回日期:2015-12-30;责任编辑:李明。
中图分类号:TD353
文献标志码:A网络出版时间:2016-01-26 15:41
文章编号:1671-251X(2016)02-0016-03
DOI:10.13272/j.issn.1671-251x.2016.02.004
李艾民,陈飞,彭茜.一种新型井下自动上卸料装置[J].工矿自动化,2016,42(2):16-18.
