碰撞避让系统的仿真教学实践研究
2016-03-03曾锐利
曾锐利
(军事交通学院, 天津 300161)
碰撞避让系统的仿真教学实践研究
曾锐利
(军事交通学院, 天津 300161)
本文以碰撞避让系统的仿真为教学实践实例,介绍利用Matlab和PreScan仿真软件搭建了碰撞避让系统的虚拟实验平台,使学生从原理、方法设计及技术需求等多个方面学习掌握智能交通技术,从教学内容和实践方法上满足社会发展对学生能力的要求。
碰撞避让系统; 虚拟实验平台; 智能交通技术
0 引言
近年来,智能交通系统的飞速发展,车辆信息化水平不断提高,满足了现代高技术战争的需要。笔者长期从事军事院校车辆运用工程专业的人才培养工作,深刻认识到实践教学对于拓展学生的知识视野、促进学生的创新性思维发展,培养创新性人才的必要性,如何将智能交通系统中的关键技术与车辆信息技术人才培养有机结合已经成为当前车辆专业教学工作的重点[1]。
在智能交通系统中,作为基础的车辆信息技术应不断发展以适应新型网络通信的需要。在众多的车辆信息技术中,车车通信V2V(Vehicle to Vehicle)技术已成为一个新兴的发展方向[2]。通过车车通信技术,可以有效解决智能交通运转中的防碰撞、防拥堵和路径规划等问题,也可以为未来的无人驾驶汽车技术发展提供支持。
在我院新一轮的课程改革中,遵循模块化教学的思想,我们在“车辆维修工程”课程中引入了车辆信息技术应用教学模块,车车通信避撞技术作为一个车辆信息技术应用的典型案例,用于开展理论与实践相结合的教学,通过提出问题的模式,引导学生自主建模,仿真计算并解决问题。
本文以基于车车通信技术的防碰撞避让方法的仿真为例,以Matlab和Prescan作为设计仿真工具,建立了一个从算法到系统的碰撞避让技术的教学虚拟平台,从而在教学实践过程中使学生能够学以致用。
1 碰撞避让系统的仿真实验案例
1.1 实验方案
为了克服传统智能车辆性能受到短道路和安装传感器探测范围的限制,实验教学中设计了一种基于碰撞时间TTC(Time to Collision)的碰撞避让系统,仿真系统采用车车通信技术,拟将车辆动力学和控制逻辑联系在一起,通过车车通信使车辆能够避让路口处的碰撞。仿真的执行流程,如图1所示。
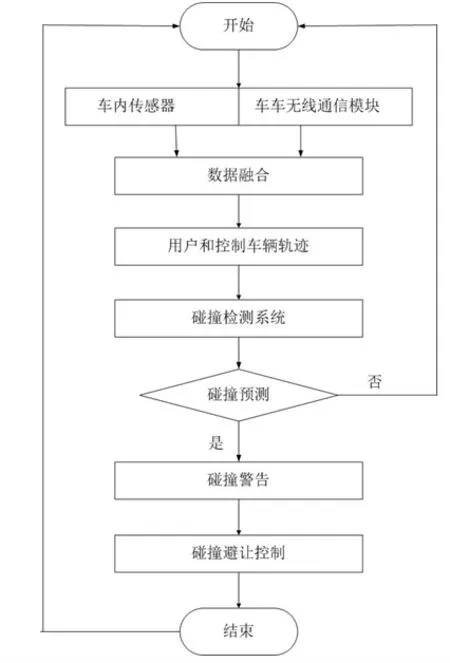
图1 基于V2V的碰撞避让方案设计
1.2 Matlab与PreScan仿真建模软件
1) Matlab
Matlab是由美国Mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境,是一个包含大量计算算法的集合。其拥有600多个工程中要用到的数学运算函数,可以方便的实现用户所需的各种计算功能。函数中所使用的算法都是科研和工程计算中的最新研究成果。在通常情况下,可以用它来代替底层编程语言,如C和C++ 。在计算要求相同的情况下,使用Matlab的编程工作量会大大减少。学生在进行碰撞系统仿真建摸过程中利用Matlab对车车通信的采集数据进行处理及控制计算,能大大缩短其在软件设计学习时间,同时也能最短时间内理解碰撞系统的控制逻辑关系。
2) PreScan
PreScan软件是由TNO开发的一款快速建立车辆行驶的模拟交通场景的软件,可以与Matlab/Simulink软件进行联合仿真。PreScan采用面向特性的参数化建模于段,用于仿真及分析智能车辆辅助系统的性能,主要用手预测和仿真车辆对外界环境的感知,车辆碰撞检测以及对车车/车路通信进行性能评价等。在开发交叉路口防碰撞系统时,利用PreScan软件能缩短碰撞避让系统的开发周期,降低开发成本和减小试验的危险性。
PreScan主要由交通场景建模、车辆数学建模、车载传感器配置、车辆控制系统建模和仿真显示器组成。在PreScan中不但可以快速搭建车道,还可以添加树木,房屋和指示牌等元素,能更加逼真地模拟和显示交通环境。PreScan软件中提供了多种传感器模型,包括全景摄像头、激光雷达、GPS及无线通信设备等。不仅种类齐全而且模拟效果比较真实,检测精度也高。根据需要选择GPS和无线通信装置,GPS可以无差别定位,通过GPS可以获得自身车辆的位置信息及运动状态相关信息。根据得到的信息可以对道路交叉口的车辆冲突状态进行检测和评估。
在PreScan中,控制模型一般包括3部分:①车辆行驶信息感知和输入模块;②车辆行驶安全的判断模块;③消除车辆行驶危险的控制执行模块。分析每一个模块所要实现的功能,确定具体实现方式,然后在PreScan中的Simulink窗口中建立各个模块的仿真模型。最后,将传感器模型、汽车动力系统和控制算法模型在PreScan的Simulink界面组成一个整体。
1.3 车辆碰撞概率预测
1) 基于驾驶员转向意图的车辆碰撞点预测
车辆行驶到交通十字路口时,驾驶员有图2所示的4种可能的转向意图[3]。这4种转向意图定义为i={直行,左转,右转,U形转弯},不同的转向方向将影响车辆的行驶轨迹,如图3所示。
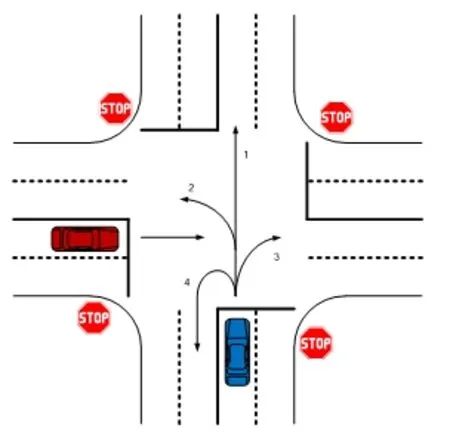
图2 十字路口处的驾驶员四种方向意图

图3 轨迹预测
为了预测轨迹和估计车辆的碰撞点,本文使用三种类型的函数拟合车辆行驶轨迹,如式(1)所示。当意图方向是直行,采用线性拟合函数;当驾驶员意图是左转或U形转弯时,利用指数拟合函数;当驾驶员意图是右转时,采用对数曲线拟合函数。两车交会后,碰撞位置便会被检测出。
(1)
2) 基于TTC的碰撞避让控制
TTC可根据速度和汽车到碰撞点的距离计算出来[4]。根据正常驾驶的驾车经验,车辆到达可能碰撞点需要的时间越长,驾驶员可以采取的避让行为的时间就越长,相应地发生碰撞概率就越低。碰撞的概率与车辆到达预测碰撞点的时间,服从正态分布,如图4所示。
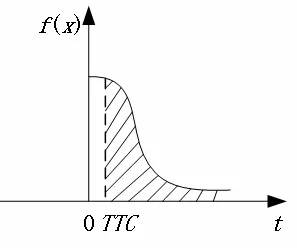
图4 标准正态函数
因此,其碰撞概率的计算方法如式(2)所示。
(2)
根据这个方法,只要位置信息被截获,碰撞概率就可以计算,将人自然反应时间对应的概率设定为阈值,帮助驾驶者做出正确的决策。避让的规则,如表1所示。
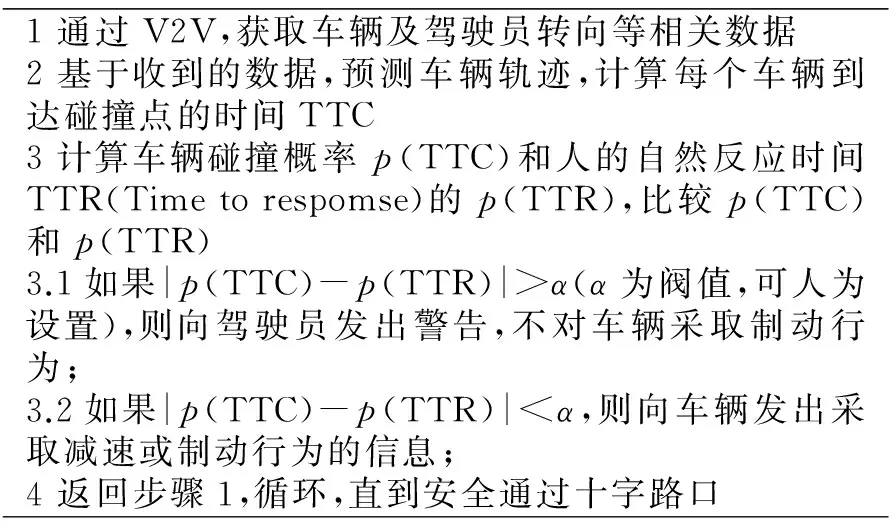
表1 实验仿真的避让规则
2 实例仿真结果及分析
2.1 实例仿真结果
1) 基于Matlab的碰撞概率计算分析
本文在室内智能车实验室获取车辆在交通路口行驶的三种情况,如图5所示。图5(a)表示一辆车Carl左拐,另一辆Car2由东向西直行;图5(b)表示两辆车交叉直行,而图5(c)则表示Carl左拐,Car2由西向东直行。这三种情况都会产生碰撞概率问题。
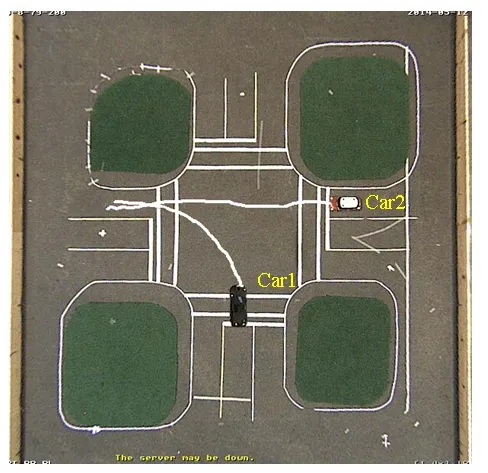
(a) 左转与向左直行

(b) 直行与直行
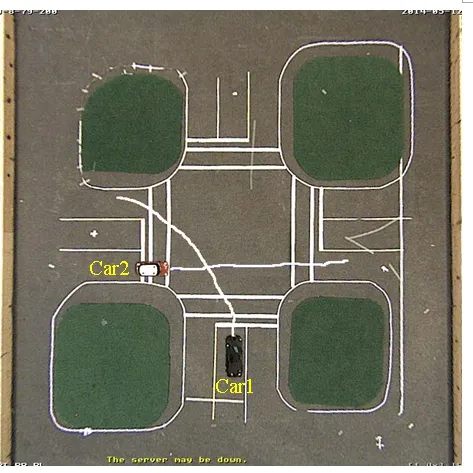
(c)左转和向右直行图5 路口处的交通场景
碰撞概率的仿真计算如图6所示,图6(a)(b)(c)分别对应于图5(a)(b)(c)三种情况。在第一种情况下,比较驾驶员注意到转向意图和没注意到转向意图的两条碰撞概率估计曲线。注意到转向意图的概率曲线上升速度比没注意到转向意图的要慢。在第五秒时,没注意到转向意图的碰撞概率是1,这意味着会发生碰撞,而注意到转向意图的碰撞概率是0.9。驾驶员注意到转向意图后,碰撞概率降低,是因为注意到转向意图后可能的碰撞点要比没注意的远,即驾驶员有更多时间做出反应,因此碰撞概率下降。在第二种情况下,两条碰撞概率曲线彼此靠近。这是因为车辆直线交叉行驶,可能的碰撞点非常接近。在第三种情况下开始时,驾驶员注意到转向意图的碰撞概率是0.23,而没注意到转向意图的碰撞概率为0.11。这是因为前者的碰撞点比的碰撞点更近。从三种情况及其结果来看,在3.5秒时,在第三种情况下碰撞概率为1,而第二种情况是0.89,第一种情况是0.61,所以,第三种情况更危险。

(a) 左转与向左直行的概率图线
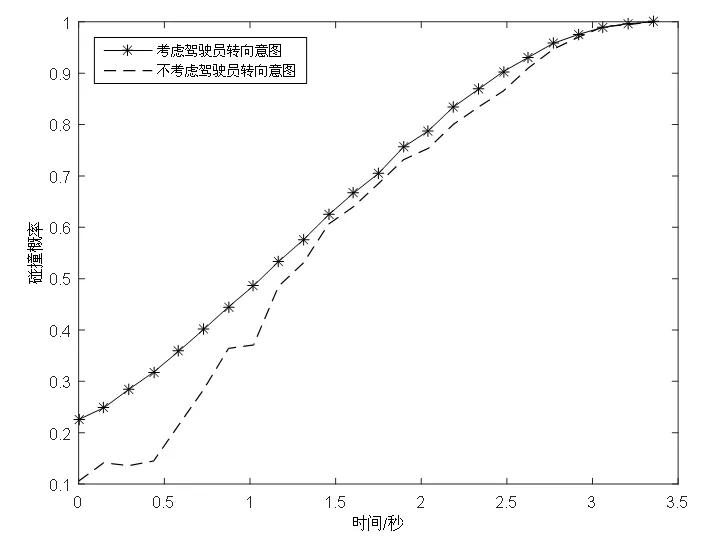
(c) 向右直行与左转的概率曲线图6 碰撞概率的计算结果
上述仿真计算均采用模拟实际情况的数据得到。
2) 基于PreScan的碰撞避让实现[5]
如图7所示,目标车辆和控制车辆按垂直交叉方向行驶,目标车辆沿垂直方向由下往上行驶,初始速度为8 m/s,在第一路段加速到10 m/s再保持匀速行驶;控制车辆沿水平方向由左向右行驶,设定初始速度为12 m/s,并开始一直减速行驶到10 m/s,当两车之间的相对距离接近安全距离时,根据两车的速度来判断控制车辆是应该减速还是加速。控制车辆加速避撞的行驶过程分为先减速而后加速的两种状态,两种状态在图8(a)中第7秒为分界点,在0-7 s时间段,为状态1,控制车辆根据两车之间的距离和转向意图,决定车辆减速,当接近安全距离时,根据两车的碰撞概率,计算控制车辆加速行驶可以有效避免碰撞,在7-10 s时间段为状态2,控制车辆加速行驶,快速通过避撞。
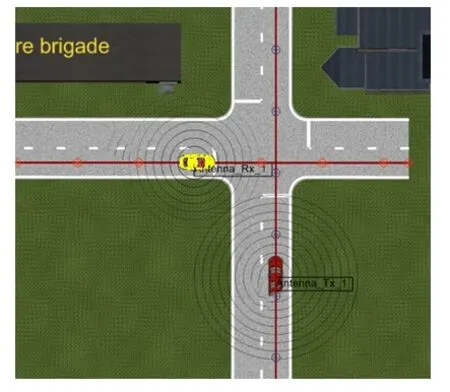
(a)状态1
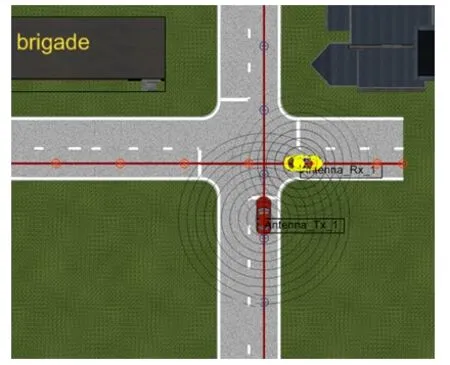
(b)状态2图7 控制车辆加速行驶模型
加速避撞时两车的速度与相对距离如图8所示,控制车辆以12 m/s的初始速度一直减速到10 m/s。当两车的相对距离接近安全距离,即有碰撞危险时,通过两车的行驶速度比较,控制车辆加速行驶。当两车安全通过交叉路口时,再控制车辆减速到期望速度。整个过程中实现了交叉路口垂直交叉直行车辆防碰撞的功能。能够有效地检测和判断两车的行驶状态,通过对控制车辆速度的控制达到碰撞避让的目的。
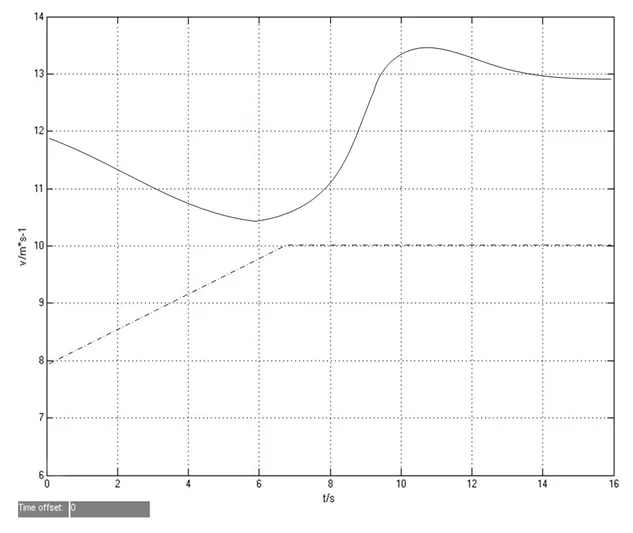
(a) 行驶速度
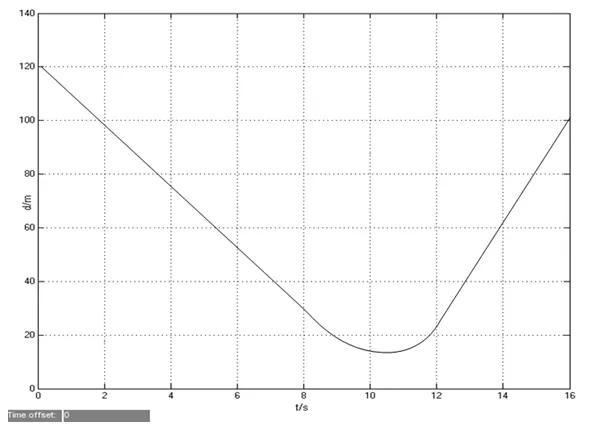
(b) 相对距离图8 加速碰撞时两车的速度与相对距离
2.2 实例仿真总结
碰撞避让系统的教学案例中,仿真实验分成两部分:仿真实验一中,先在Matlab中模拟了通过V2V交换车辆速度、方向及驾驶转向意图,基于上述信息预测车辆的行驶轨迹,估计基于碰撞时间TTC的碰撞概率;仿真实验二中,采用车辆行驶场景模拟软件PreScan,搭建基于V2V的汽车碰撞避让系统,选取十字路口处的直行车辆作为仿真对象,通过车车通信来预测可能的行驶轨迹以及可能的碰撞点,当车辆判定碰撞即将发生时控制车辆减速或加速,来避免碰撞发生。仿真结果表明,案例的实验设计符合实际情况,碰撞预测及避让规则有效。
经过实际教学环节应用发现,由2名学生为1组进行分工协作,开展理论建模、数据采集、仿真计算、实验报告等环节的内容,完成2学时的课堂实验教学和4小时的课余时间自主实践,既可以锻炼学生的团队协作精神,也可以激发学生自主学习和解决问题的兴趣。
3 结语
本文的所提实践教学的例子结合Matlab和Prescan两个仿真软件仿真完成。学生通过该实践环节,既体会了自主的算法设计过程,掌握不同仿真软件的特点及优势,同时能够对智能交通的关键技术有一定的了解,整个环节既能有效提高学生对智能化技术在车辆中应用的认知,也充分锻炼了学生独立分析和设计的能力,这对车辆运用工程专业人才培养是一项具有重要意义的工作。
[1] 肖云魁.车辆信息技术[M]. 北京: 兵器工业出版社, 2010.
[2] 杜春臣,孙浩. 车车通信技术分析[J]. 上海: 上海汽车, 2012. (2):34-36.
[3] Ruili Zeng, Weihua Sheng, Dan Yang. Collision Probability Computation Based on Vehicle to Vehicle to Vehicle Communication[C], Shenyang, Proceeding of Cyber on TACIS 2015:1462-1467.
[4] 王斌,朱云生,杨凡弟. 一种基于车车通信的十字路口威胁评估方法研究[J]. 上海: 科技视界, 2015,7(15):160-160.
[5] 郭路兵,梅志千,贺勇. 基于Prescan软件的交叉路口防碰撞控制系统仿真[J]. 贵阳: 机械与电子,2014,(2):22-26.
Teaching Practice Simulation Research about Collision Avoidance System
ZENG Rui-li
(MilitaryTransportationUniversity,Tianjin300161,China)
In this paper, taking collision avoidance system as the teaching practice example, the method about how to build visual experimental platform by Matlab and PreScan has been introduced. This teaching practice example help students to master intelligent transportation technology from several aspects such as theory, method design and technology needs. This teaching content and practice method meet the requirements of social development for the student ability.
collision avoidance system; virtual experimental platform; intelligent transportation technology
2015-12-29;
2016-05-25
曾锐利(1976-),男,博士,副教授,主要从事车辆信息技术研究与应用,E-mail:zruili@163.com
TP301
A
1008-0686(2016)05-0137-06