基于ESP系统的汽车状态参数估计方法研究
2016-03-02攸金东
攸金东
(中石化地球物理有限公司装备管理中心,南京 211102)
基于ESP系统的汽车状态参数估计方法研究
攸金东
(中石化地球物理有限公司装备管理中心,南京 211102)
ESP(Electronic Stability Program)车身电子稳定系统具有防抱死、防侧滑、纠正汽车转向等功能,其对汽车安全行驶具有重要作用。ESP系统的精确程度取决于车辆传感器测量结果,而在车辆控制中某些状态参数(如车辆质心侧偏角等)无法直接获得,进而限制了ESP系统的功能提升。本文针对如何获取汽车行驶中的状态参数问题提出了基于卡尔曼滤波算法的汽车状态参数估计模型,并利用该模型估算出车辆运行过程中横摆角度ωr与质心侧偏角β的值,最终通过与整车仿真结果的对比,验证了算法的正确性。
ESP车身电子稳定系统 软测量技术 卡尔曼滤波算法 状态参数
随着我国人民经济水平的提高,我国的汽车销量也迅速增长至全球首位,而随之而来的车辆安全、环保等问题却日益凸显。据有关部门统计,在2015年全球发生的交通事故中,车辆在弯道或易滑路面的转向失控是造成车辆失控导致交通事故的重要原因之一。ESP车身电子稳定系统的提出对于缓解车辆侧滑事故起到了很重要的主动安全预防作用,其可以很好地提高车辆在转弯时的稳定性,减少车辆由于转向不足或者转向过大引起的交通事故。然而,目前国内外对ESP控制监测的车辆状态参数主要来源与车载传感器数据,某些传感器测量不精确或者无法测量数据(如横摆角速度rω与质心侧偏角β),极大地限制了中低档车辆ESP控制系统的控制效果。因此研究出一种估算车辆运行中的横摆角速度rω与质心侧偏角β的方法,对于提升ESP车身电子稳定系统的应用具有非常重要的研究意义。本文基于前人的研究基础采用软测量技术,采用卡尔曼滤波算法建立汽车动力学模型与状态方程估计出汽车运动过程中的状态参数,估计出汽车运行中的横摆角速度rω与质心侧偏角β,并通过对比Matlab中建立的整车仿真模型,验证了算法的有效性。
1 系统关键技术简介
1.1 ESP车身电子稳定系统
ESP是一种稳定车身的控制系统,其组成由ESP电子控制单元、转速传感器、方向盘传感器、摇摆运动感应器与发动机ECU组成。目前国外很多汽车公司都开发出了自己的车身电子稳定系统,不同厂家命名不同,但其功能大体一致,均可实现车辆在紧急操控、路面结冰等特殊行驶条件下的稳定行驶。ESP主要可用于调整汽车转向控制,它具有监测车辆状态预防在突发状况时,驾驶人误操作而造成车辆转向失控的情况。根据有关数据表明,不同型号的车辆装上EPS系统之后都会相应地减少碰撞率,其中SUV车型可减少70%左右的碰撞事故。ESP系统的工作流程为:车载转速转角传感器将车辆的转速、转角信号传递给ESP控制单元,ESP根据传送的信号识别出车辆的转向信息,结合车辆侧向加速传感器与横摆角传感器传递的信号识别出车辆的行驶情况,ESP系统对于车辆的转向具有重要作用,特别对于转向不足与转向过度的情况,系统会根据车辆转向不足或过度的具体情况,向车辆的制动系统发出不同信号,产生不同的制动力,以防止车辆因转向原因出现事故,维持车辆行驶的安全性与稳定性。ESP控制系统对于车辆转向情况的控制图如图1所示。

图1 车辆转向情况对比
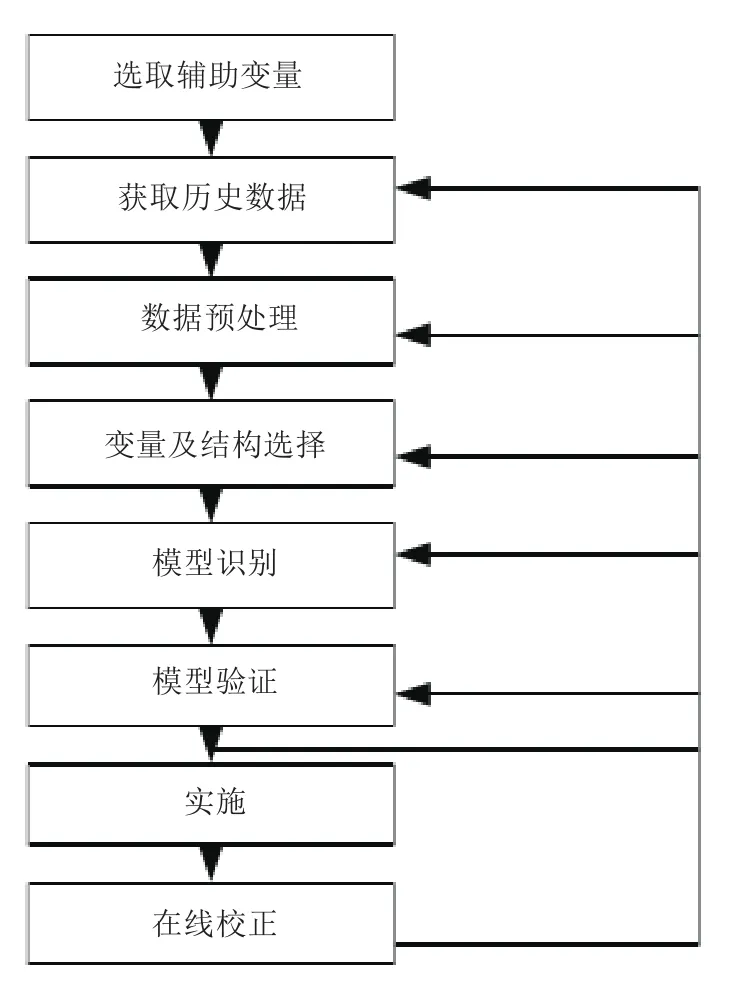
图2 软测量参数识别流程图
1.2 基于状态估计的软测量技术
软测量技术是一种基于数学建模与系统辨识的间接测量方法,其主要通过建立系统数学模型对变量进行估计计算,软测量技术是一种智能测量方法,通常人们根据参数的容易获取程度,将易于获得的变量参数称为辅助型参数,将不容易直接获得的参数称为主导型参数。主导型参数往往根据辅助型参数构造的数学模型,通过数学推算获得。软测量技术参数识别原理图如图2所示。
在图2中,辅助型参数与主导型参数之间的变量关系可以用以下关系式表示为:

软测量技术发展至今已有很多应用到实际中的实例,针对不同的工程对象往往有不同的软测量方法,目前应用较广泛的软测量技术有:基于机理分析的软测量技术;基于状态估计的软测量技术;基于神经网络、遗传算法等智能算法的软测量技术;基于回归分析的软测量技术。本文将着重分析基于状态估计的软测量技术。
1.2.1 状态估计测量方法
基于状态估计的软测量技术以系统的状态空间表达式为估计模型,根据状态方程通过状态估计方法或状态观测方法对系统参数进行估计计算。首先,建立系统离散数学模型,设已知参数或辅助型参数为x(t),对应离散方程时间序列为{X(nT)};相应待测变量为y(t),对应离散方程时间序列为{Y(nT)},系统参数测量问题则转化为通过时间序列为{X(nT)}推导时间序列为{Y(nT)}最优解的数学问题。常采用的状态估计数学模型为:

其中,x为状态参数,y为观测参数,θ为辅助参数,u为输入参数,v、w为噪声参数;A、B、C、Cθ为系统系数矩阵。
系统参数估计过程为:状态初值x(t)借助辅助参数θ获得估计值,并最终获得观测值y的估计值。
2 车辆模型状态估计方法
2.1 卡尔曼滤波算法
卡尔曼滤波算法是一种典型的基于状态参数的软测量方法。它是一种对离散信号进行线性滤波的递推,进而获得最优解的方法,其主要特点为:1)是一种适用于求解多维随机问题的递推算法;2)可对所有信号进行处理并由系统状态方程描述参数变化情况;3)可利用系统现实存在的白噪声与测量噪声特性估计被观测参数;4)离散型滤波算法可通过计算机仿真实现。
卡尔曼滤波算法大多用于线性系统,而车辆的行驶过程、电机转轴过程均为典型的线性系统,建立上述过程的数学模型后,通过系统离散化即可建立系统状态方程与观测方程。
卡尔曼算法在状态方程中体现的滤波过程为:
设车辆行驶过程中初始状态方程与观测方程为:

状态下一步预测方程为:

估计状态方程为:

滤波增益矩阵为:

估计均方差为:

算法的状态滤波框图,如图3所示。

图3 卡尔曼滤波状态观测图
2.2 车辆二自由度转向状态估计模型
由于我们在分析汽车运动模型时,通常设定其沿x轴运动的速度是恒定的,因此汽车做平面运动时即可等效为类似于摩托车的二自由度模型。这里的二自由度常包括沿y轴方向的侧向运动与沿z轴方向的摆动转动的参数。车辆的二自由度模型如图4所示。

图4 车辆二自由度模型
根据图4可以建立汽车的二自由度微分方程,但是还需要假设以下条件:
车辆的驱动力比较小,地面对轮胎特性的影响可以忽略;
可忽略汽车运动过程中的空气阻力;
可忽略车辆负载大小对于轮胎特性与轮胎回正能力的影响;
设轮胎特性保持在线性范围内;
根据车辆二自由度的微分方程可推导出车辆前轮转角δ与质心偏角β的值分别为:;进而推导出车辆行驶过程中横摆角速度rω与质心侧偏角β的状态方程为:

3 系统仿真
根据式(8)在MATLAB软件中搭建离散系统模型并在AMEsim环境中模拟车辆行驶过程,将车辆的车速信号v、方向转角信号dta、侧向加速度信号ay传递给simulink模块,在simulink中建立的仿真结构图如图5所示。

图5 车辆二自由度simulink仿真框图
系统各参数的意义如表1所示。

图6 估计结果
设车辆速度为60km/h,输入车辆运行过程中方向盘转角δsw、车速v以及侧向加速度ay的值后,估计系统在阶跃输入下横摆角速度rω与质心侧偏角β的变化曲线分别如图6、图7所示。
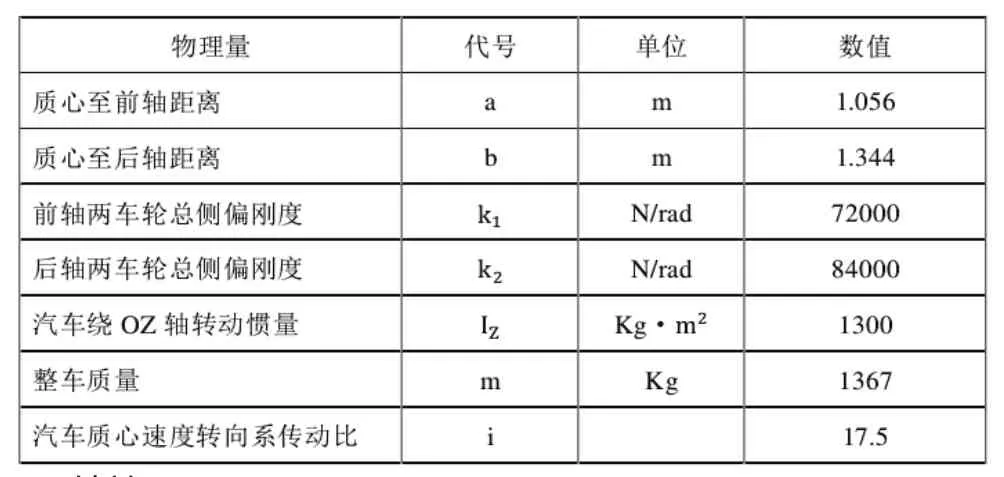
表1 系统各参数意义
4 结论
本文分析了ESP车身电子稳定系统的工作原理与应用现状,针对当前ESP系统无法准确测量车辆运动过程中的横摆角速度rω与质心侧偏角β的情况,提出来软测量技术测量上述参数的方法,通过建立汽车二自由度状态方程,利用卡尔曼滤波算法估计β与β的值。最后结合AMEsim环境与MATLAB软件完成了系统模型的搭建,并针对车辆运行过程进行了仿真,获得了rω与β的估计值变化曲线。
[1] 孟爱红,王治中,宋健等. 汽车ESP液压控制单元关键部件建模与系统仿真[J].农业机械学报, 2013,(2):22-26.
[2] 李以农,谢敏松,米林.基于AMESim的汽车ESP液压系统建模[J].计算机辅助工程,2010,(2):68-71.
[3] 张勇,李鑫,欧健.汽车ESP系统的控制策略及硬件在环仿真[J]. 西南师范大学学报,2012,(9):58-61.
[4] 马春卉,吴志林,王良模等.汽车ESP系统的建模和控制方法[J].南京理工大学学报, 2010,(1):111-113.
[5] 付燕荣,王国业,关志伟等.汽车ABS/ASR/ESP集成控制策略研究[J].机械制造与设计工程,2014,(2):76-79.
Auto State Parameter Estimation Method based on the ESP system Research
YOU Jindong
(The equipment management center of sinopec geophysical co., LTD , Nanjing 211102)
ESP (Electronic Stability Program) vehicle Electronic Stability system with anti-lock braking, sideslip, correct the vehicle steering, and other functions, it plays an important role in auto safety driving. ESP system accuracy depends on the vehicle sensor measurement results, and some state in the vehicle control parameters (such as the vehicle mass center side-slip Angle, etc.) can't direct access, which in turn limit the function improvement of ESP system. In this paper how to get the car moving state parameters of the problems is proposed based on kalman filtering algorithm of vehicle state parameter estimation model, and USES the model to estimate the vehicle running in the process of horizontal pendulum Angle and the center of mass of side-slip Angle value, finally by comparing with the vehicle simulation results, verify the correctness of the algorithm.
body in ESP electronic stability system,Soft measurement technology, Kalman filtering algorithm,State parameter