基于CAN总线的网络控制系统的仿真研究
2016-02-27张晓倩宋晓茹曹建建
张晓倩,宋晓茹,曹建建
(1.西安工业大学 电子信息工程学院,陕西 西安 710032;2.西安工业大学 工业中心,陕西 西安 710032)
基于CAN总线的网络控制系统的仿真研究
张晓倩1,宋晓茹1,曹建建2
(1.西安工业大学 电子信息工程学院,陕西 西安 710032;2.西安工业大学 工业中心,陕西 西安 710032)
为了研究控制网络对网络控制系统的影响,利用TrueTime工具箱中的TrueTime Network模块和干扰节点模拟网络环境,利用TrueTime Send模块、TrueTime Receive模块与TrueTime Kernel模块搭建出完整的网络控制系统的仿真模型。分别仿真研究基于以太网和基于CAN总线的网络控制系统的性能,以及基于CAN总线在网络传输速率不同的情况下网络控制系统的性能。基于CAN总线的网路控制系统在负载较大和网络传输速率较高的情况下,系统输出曲线超调量小,调节时间短。仿真结果表明:CAN总线在网络控制系统中具有更好的稳定性。
网络控制系统;以太网;CAN总线;TrueTime工具箱;传输速率
0 引 言
网络控制系统[1]是指在控制器和被控对象之间加入通信网络,使传感器到控制器的信息传输和控制器到执行器的信息传输通过通信网络来实现[2-6]。安装在网络上的设备,像传感器、控制器和执行器都是带网络接口的,这些设备是实时控制网络中的独立节点,各个节点之间通过网络传输信息,使得不同地点的用户实现网络资源共享且能够相互协调工作。
王俊杰等[7]在网络传输数据速率一定的情况下,研究了不同的丢包率对网络控制系统性能的影响。张雪林[8]详细分析了调度算法对基于CAN总线的网络控制系统性能的影响。邓文展等[9]在同时存在时延和数据包丢失的情况下,分析了网络控制系统的稳定性问题。但并没有针对基于CAN总线的网络控制系统以及CAN总线在不同的数据包传输速率的情况下进行分析。
文中考虑了控制网络和传输速率,在具有一定干扰的情况下,仿真分析了在不同控制网络和不同传输速率情况下网络控制系统的稳定性。
1 TrueTime仿真工具箱
为了仿真研究网络控制系统,仿真工具箱必须能够反映控制系统和网络传输系统。考虑到这两方面的特性,瑞典Lund工学院的Martin Ohlin、Dan Henriksson 和Anton Cervin等开发出TrueTime[10-13]工具箱。TrueTime工具箱是一种比较理想的仿真工具,目前已发展到TrueTime 2.0版本。TrueTime 2.0工具箱包含的模块有TrueTime Kernel、TrueTime Network、TrueTime Wireless Nerwork,与TrueTime 1.5版本含有的模块相同,新增加了TrueTime Send、TrueTime Receive这两个模块。
文中利用网络模块(TrueTime Network)模拟数据包传输速率、数据包大小和丢包率等网络参数,用于分析各类参数对网络控制系统的性能影响,具体的网络模块如图1所示。
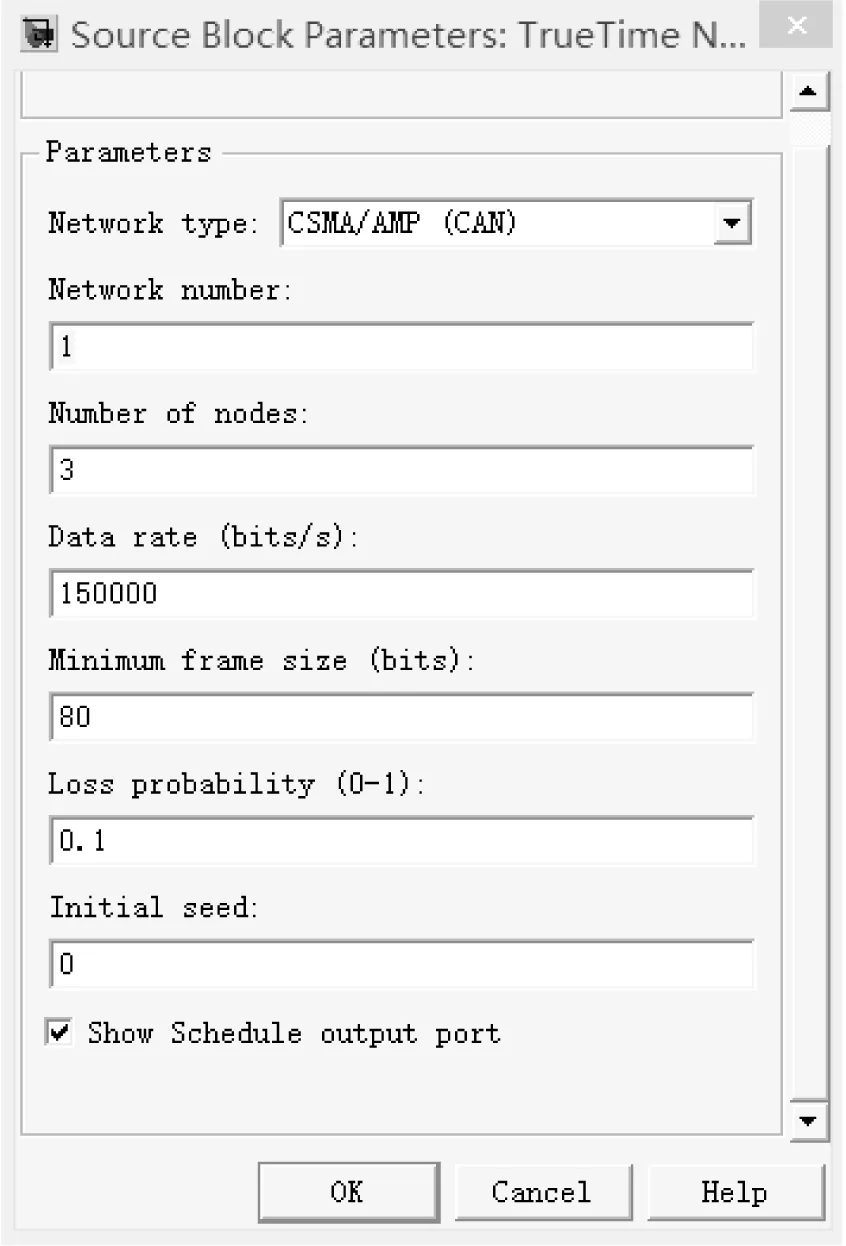
图1 TrueTime Network模块
TrueTime Network模块用于网络控制系统中各个节点之间的通信,也可用于仿真不同局域网中数据包的传输过程。其中,Network type用于设置控制网络类型,Number of node用于设置模块的编号,Data rate用于设置数据包传输速率,Minimum frame size用于设置最短的帧长,Loss probability用于设置网络中数据包的丢失率,Initial seed用于设置开始取值位置。
TrueTime Send模块和TrueTime Receive模块是TrueTime 2.0工具箱增加的两个模块,这两个模块都是只有一路的输入接口和输出接口,用于搭建单个输入接口和单个输出接口的独立节点。TrueTime Send模块和TrueTime Receive模块可以与内核模块混合使用搭建出完整的网络控制系统的仿真模型,需要采用MATLAB或C++编写程序;也可以不使用内核模块搭建完整的网络控制系统模块,不需要编写程序。
2 以太网和CAN总线
在以太网中,节点通信采用CSMA/CD协议。该协议的特点是系统中的节点在发送消息之前必须先监听网络的状态,若网络忙,一直等到网络空闲才可发送信息,否则可以立即发送信息。若网络空闲,当有多个节点同时发送信息,就会发生冲突,导致发送中断。这种情况处理的办法是在发送信息之前,若该节点侦听到网络中有很多信息发生冲突,该节点就要等待一个随机时间长度,再重传。
以太网的缺点是传输在网络中的数据包受到随机时延的影响,尤其是当网络处于高负载下且冲突严重时,此时网络的数据吞吐量在下降,进而产生了网络诱导时延,且时延是随机、无上界的。若以太网用于网络控制系统中,只适合网络处于轻负载时的情况,当网络负载太大时,产生的时延随机且无界,不适合应用于网络控制系统。
CAN总线协议是从最初为汽车工业开发的标准中发展而来的,CAN总线支持总线型的拓扑结构,双绞线、同轴电缆或光纤作为传输介质。CAN总线协议使用的是载波帧听多路存取/消息优先仲裁(CSMA/AMP)协议[14],该协议是面向消息的,且每个消息根据规定的优先级在网络中进行传输,这样就可以仲裁很多节点同时访问网络决定哪个节点获得网络的访问权。CAN总线协议采用的多主竞争方式结构的特点是,网络中每个节点可以不分主从在任意时间发送信息到其他节点,也就是当网络空闲时,每个节点对网络都有访问权。若当多个节点同时向网络发送消息而发生冲突,运用逐位仲裁原则,借助帧中开始部分的标识符,优先级高的节点可不受影响地继续发送信息[15],而优先级低的节点主动停止发送数据,直到网络空闲再传输。因此,不会出现节点冲突,避免了网络拥塞的发生。
CAN总线优点:传输信号采用短帧结构,受干扰概率低,若节点严重错误,具有自动关闭输出的功能,使其他节点不受影响,具有高可靠性。
3 干扰仿真实例
3.1 仿真模型
利用TrueTime工具箱来搭建网络控制系统仿真模型,如图2所示。由一个二阶被控对象与传感器相连,传感器通过网络发送采样指令,并将采样值传送给控制器,控制器进行控制算法的计算,把控制信号通过网络传送给执行器,最终实现对被控对象进行实时控制。
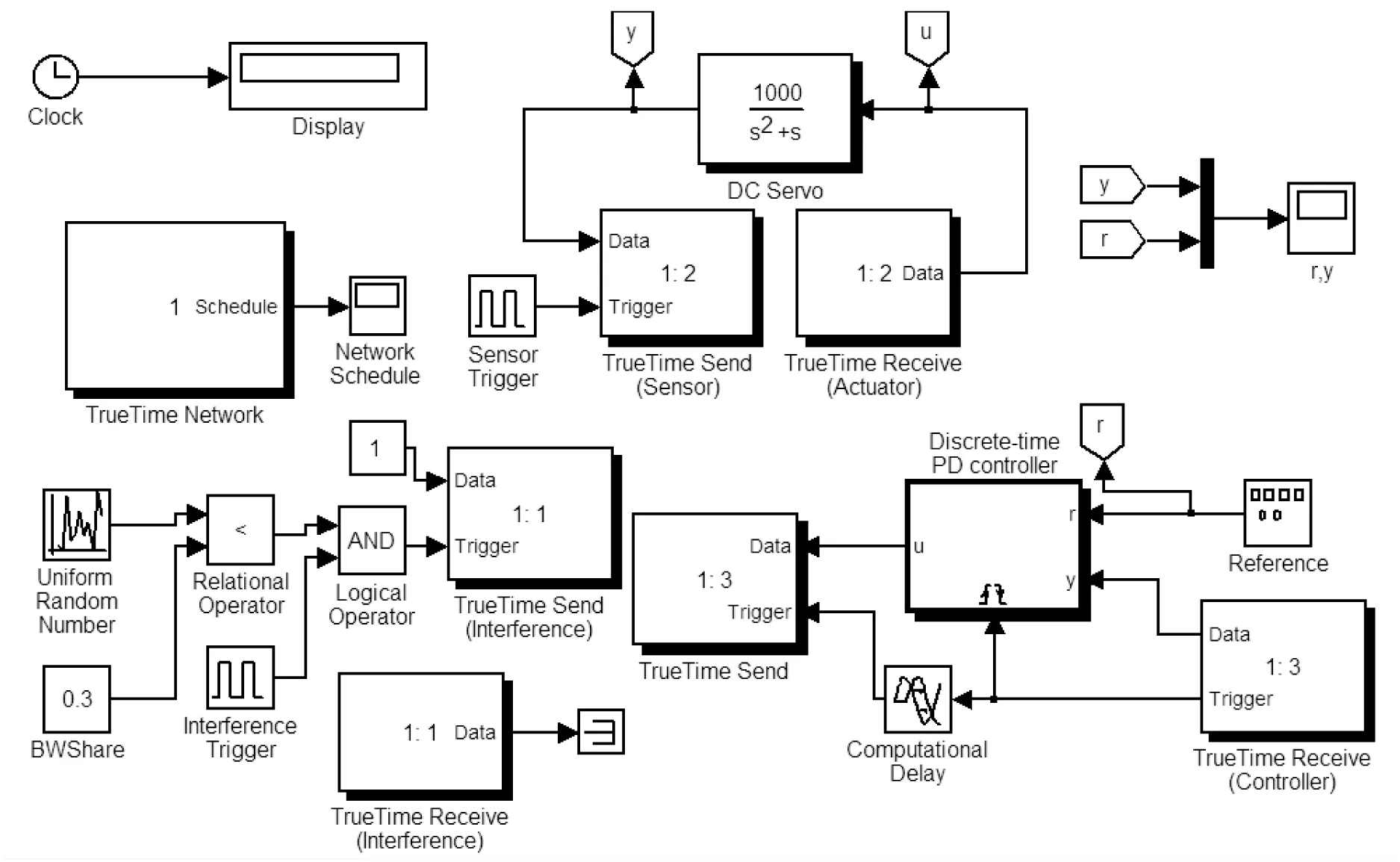
图2 网络控制系统仿真模型
3.2 仿真结果分析
(1)改变网络控制系统仿真模型中的控制网络类型,分析基于以太网的仿真结果和基于CAN总线的仿真结果。
设网络带宽占用率为30%,通信模式设为以太网,网络控制系统仿真结果如图3所示。
设网络带宽占用率为30%,通信模式设为CAN总线,网络控制系统仿真结果如图4所示。
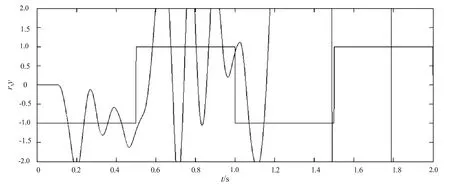
图3 网络控制系统仿真结果(1)
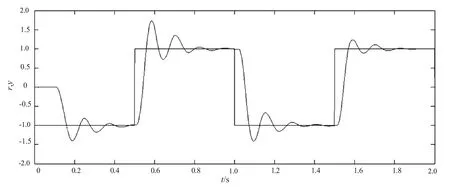
图4 网络控制系统仿真结果(2)
从图3、4可以看出,当网络带宽占用率为50%,基于以太网的网络控制系统输出曲线呈发散状态,系统已经不稳定;基于CAN总线的网络控制系统的输出曲线呈收敛状态,且能够很好地跟随输入。说明CAN总线能够保证重负载下网络控制系统的稳定性。
(2)改变CAN总线网络的传输速率,分析不同传输速率下的仿真结果。
设网络带宽占用率为30%,通信模式设为CAN总线,丢包率为15%,传输速率为80 kbit/s,网络控制系统仿真结果如图5所示。
设网络带宽占用率为30%,通信模式设为CAN,丢包率为15%,传输速率为100 kbit/s,网络控制系统仿真结果如图6所示。
从图5和图6中可以看出,当网络控制系统中控制网络采用CAN总线,在网络带宽占用率、丢包率相同的情况下,传输速率低的输出曲线呈现失真,系统不稳定;传输速率高的输出曲线超调量小,调节时间短,快速地跟随输入信号。说明基于CAN总线的网络控制系统在数据传输速度较高的情况下,系统的实时性好、控制效果好。
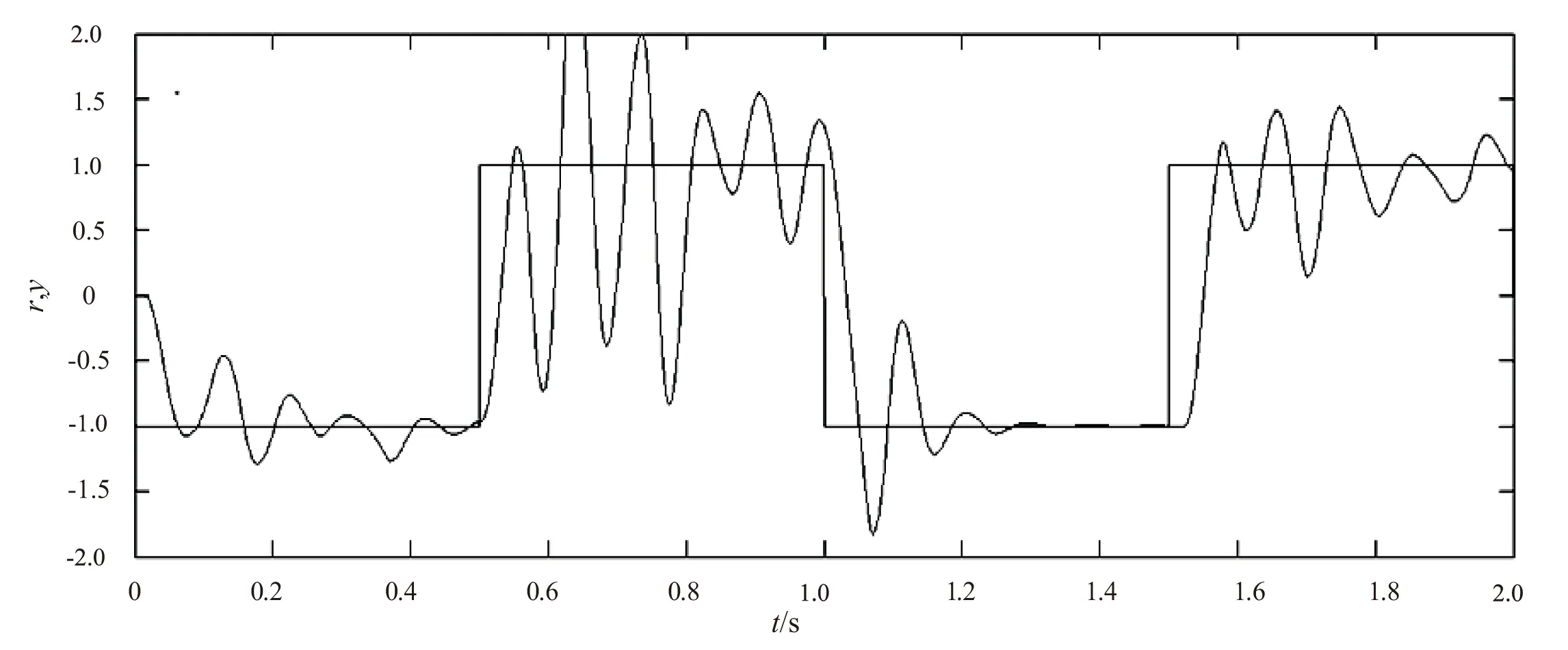
图5 网络控制系统仿真结果(3)
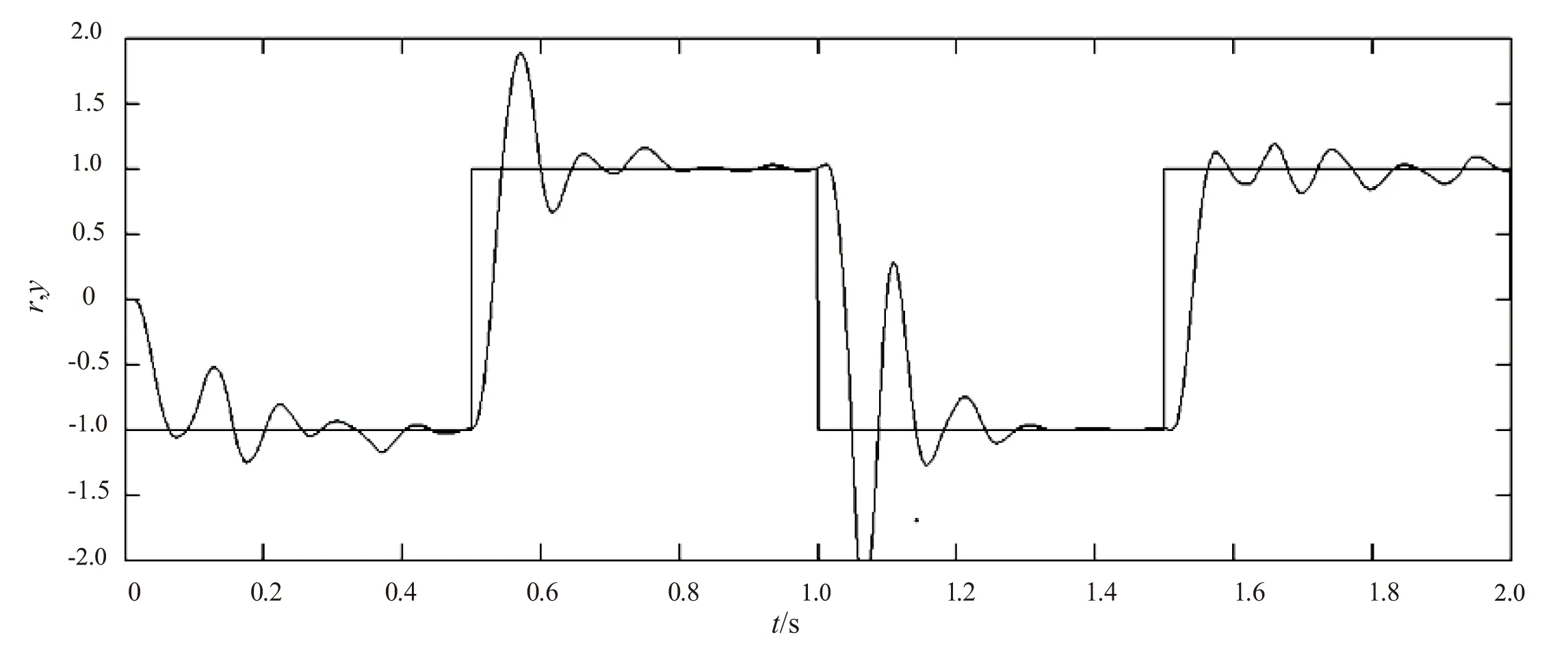
图6 网络控制系统仿真结果(4)
4 结束语
网络控制系统是涉及网络技术、通信技术、控制技术等多领域的复杂系统,如果不研究控制策略对网络控制系统的影响,不同的控制网络及控制网络的传输特性对网络控制系统的影响是不一样的。文中从控制网络技术的角度出发,改变网络控制系统仿真模型的控制网络类型及网络传输数据的速率,通过仿真结果验证了CAN总线在负载较大和传输速率较高时都能够保证网络控制系统的稳定性。
[1] Walsh G C,Ye H,Bushnell L.Stability analysis of networked control system[C]//Proc of control conference.San Diego,CA,USA:IEEE Press,1999:2876-2880.
[2] WalshG C,Ye Hong.Scheduling of networked control systems[J].IEEE Control Systems Magazine,2001,21(1):57-65.
[3] Zhang Wei,Branicky M S,Philips S M.Stability of networked control systems[J].IEEE Control System Maganize,2001,21(1):84-99.
[4] 邓士普,王树青.基于网络的控制系统研究综述[J].化工自动化及仪表,2003,30(6):1-5.
[5] 朱其新,胡寿松.网络控制系统的分析与建模[J].信息与控制,2003,32(1):5-8.
[6] Cervin A,Eker J,Bernhardsson B,et al.Feedback-feed forward scheduling of control tasks[J].Real-time Systems,2002,23(1):25-53.
[7] 王俊杰,孙君曼.基于TrueTime的网络化控制系统仿真平台的构建[J].郑州轻工业学院学报:自然科学版,2011,26(1):79-82.
[8] 张雪林.基于CAN总线的网络控制系统研究[D].南宁:广西大学,2007.
[9] 邓文展,宋立忠,尹 洋.网络控制系统的模型建立及稳定研究[J].计算机仿真,2009,26(8):108-111.
[10] 王轶卿,赵英凯.TrueTime在实时控制系统仿真中的应用[J].机械与电子,2005(3):72-73.
[11] 何坚强,张焕春,经亚枝.基于Matlab环境的网络控制系统仿真平台[J].计算机工程与应用,2005,41(2):142-145.
[12] 何坚强.基于控制网络的测控系统仿真实验平台[J].实验技术与管理,2005,22(3):69-72.
[13] 何坚强,张焕春.基于网络的实时控制系统仿真[J].工业控制计算机,2004,17(1):28-29.
[14] 徐 超,李正平,汪长勤.基于CSMA/CD的CAN总线访问的建模与仿真的研究[J].仪器仪表学报,2008,29(4):866-869.
[15] Nolte T,Hansson H,Norstrom C.Probabilistic worst-case response-time analysis for the controller area network[C]//Proc of real-time and embedded technology and applications symposium.[s.l.]:IEEE,2003:200-207.
Research on Simulation of Network Control System Based on CAN Bus
ZHANG Xiao-qian1,SONG Xiao-ru1,CAO Jian-jian2
(1.School of Electronic Information Engineering,Xi’an Technological University,Xi’an 710032,China;2.Industrial Center,Xi’an Technological University,Xi’an 710032,China)
In order to study the influence of the control network on the networked control system,network environment is simulated by using the TrueTime Network module and the interference node in TrueTime toolbox.The simulation model of the complete networked control system is built by using the module of TrueTime Send,TrueTime Receive and TrueTime Kernel.Simulation study on the performance of the networked control system respectively based on Ethernet and CAN bus and of the networked control system with different network transmission rate of CAN bus is conducted.The output curve of the system have small overshoot and short adjusting time when the networked control system based on CAN bus in the case of heavy load and high transmission rate.The simulation shows that CAN bus has better stability in the networked control system.
network control system;Ethernet;CAN bus;TrueTime toolbox;transmission rate
2015-10-15
2016-01-20
时间:2016-06-22
陕西省自然科学基础研究计划(2014JM2-6093)
张晓倩(1983-),女,助教,研究方向为网络控制系统;宋晓茹,副教授,研究方向为多传感器信息融合。
http://www.cnki.net/kcms/detail/61.1450.TP.20160621.1701.020.html
TP273
A
1673-629X(2016)07-0192-04
10.3969/j.issn.1673-629X.2016.07.041
