一种新型无轴承开关磁阻发电机的设计
2016-02-24孙玉坤刘良田
孙玉坤,刘良田,袁 野
(1.江苏大学,镇江 212013;2.南京工程学院,南京 211167)
一种新型无轴承开关磁阻发电机的设计
孙玉坤1,2,刘良田1,袁 野1
(1.江苏大学,镇江 212013;2.南京工程学院,南京 211167)
分析了一种转子由6个凸极和一个圆盘轴向叠加而成的12/6极混合转子结构无轴承开关磁阻发电机的发电原理与悬浮机理。利用等效磁路法,并将绕组电流等效为方波,结合平均转矩与输出功率的关系,推导出了无轴承开关磁阻发电机的主体尺寸计算公式。在不考虑转子偏心情况下,推导了电机悬浮力的表达式。根据设计样机的径向负载要求,在留有一定径向力裕量的基础上计算得出转子圆盘尺寸,并通过绕组峰值电流与气隙磁密的关系计算绕组的匝数。最后,基于所提方法,在Ansoft中建立12/6极混合转子结构BSRG实验样机的模型,验证了所提设计方法的正确性。
无轴承开关磁阻发电机;混合转子;悬浮力;设计
0 引 言
无轴承开关磁阻电机(Bearingless Switched Reluctance Motor,BSRM)无需传统的机械轴承,结合了开关磁阻电机结构简单、运行可靠、低成本和磁轴承无摩擦、无需润滑、高速度适应性强以及寿命长等一系列特点使得无轴承开关磁阻电机在离心机、高速机床、电动汽车和飞轮储能等领域具有重要研究意义与广阔应用前景,受到国内外学者普遍关注。
到目前为止,国内外学者对电动运行状态下12/8极BSRM进行了大量的研究。例如,日本的A.Chiba和M.Takemoto等学者在数学模型和控制策略方面进行了深入研究[1-2],国内学者在控制策略[3]、数学模型理论分析[4]、电磁特性分析[5]以及本体优化设计[6]等方面也有了一定的建树。文献[7]提出BSRG的全周期发电,并对本体主体尺寸进行了研究与设计,但由于BSRG内发电系统与悬浮系统间严重的非线性及强耦合问题依旧没有解决,使其控制系统相当复杂。文献[8]提出了一种悬浮系统与发电系统耦合程度相对较小、径向悬浮性能高的新型BSRG,但该电机结构复杂、发电功率低、控制难度较大。文献[9]提出了一种12/6极混合转子结构BSRG及其控制方法,电机发电过程中所有转子极均参与发电,转子极制动转矩大,发电出力多,悬浮相电流对发电相电流影响小,径向负载能力强,极大的提高了发电效率。目前对于这种两相的BSRG本体进行具体设计的文献很少。
所以,本文对12/6极混合转子结构BSRG本体进行设计,结合发电模式下12/6极混合转子结构BSRG的运行特点,推导了电机定子以及混合转子尺寸的计算公式,在不考虑转子偏心情况下径向悬浮力的计算以及绕组参数的确定。最后,为了验证了本文所提设计方法的正确性,在Ansoft中建立了12/6极混合转子结构BSRG实验样机的模型,得到了与预期相符的结果。
1 悬浮机理和发电原理
1.1 绕组结构和悬浮机理
图1为12/6极混合转子结构BSRG的结构示意图。该发电机定子有12个凸极,每个定子凸极绕有一套绕组,转子由6个凸极和1个圆盘轴向叠加而成,转子上无绕组。

图1 12/6极混合转子BSRG结构示意图
该电机分为A,B两相,定子机械结构互成60°的每两个凸极为一组,三组组成一相。
图2为电机悬浮机理示意图。以A相为例,6个上凸极上分别绕有1个绕组,其中Na1与Na2,Na3与Na4,Na5与Na6两两相连且单独施加电流控制产生相反方向的磁通,如图中虚线所示,磁链通过圆盘、定子凸极、定子铁芯形成闭合磁路,吸引圆盘产生3个自由度上的径向力,通过调节三组绕组电流来控制径向悬浮力。由于电机稳定运行时定子凸极到圆盘的磁阻最小且保持不变,且对绕组电流进行斩波控制以保证电机的对称励磁,转子凸极对悬浮力的影响很小,故计算悬浮力时仅考虑圆盘受的悬浮力。

图2 12/6极混合转子BSRG悬浮机理示意图
如图2所示,以A相为例,当转子在平衡位置受到任何一个方向的最大扰动力时,可以控制三组绕组电流的大小来产生一个与扰动力大小相同方向相反的磁拉力,达到转子动态平衡的目的。B相悬浮力产生原理与A相相同,仅仅在时间上与A相错开1个周期,也可产生任意方向上的悬浮力。
1.2 发电原理
由于电机处于发电状态时,圆盘部分磁路磁阻最小,圆盘提供径向力的同时不产生转矩,故转子负转矩全部由转子凸极提供。图3为12/6极混合转子结构BSRG的发电机理示意图。

图3 12/6极混合转子BSRG发电机理示意图
以电机逆时针方向旋转为正,当定转子凸极对齐时定义为转子0°位置,转子位于该位置时,绕组电感值最大,气隙磁导最小。12/6极混合转子BSRG发电电流波形随转子位置角变化如图4所示,图中虚线表示相电感。

图4 12/6极混合转子BSRG的发电电流波形
当转子位于区间Ⅰ内,A相电感位于上升区,作为悬浮相导通的同时也担任悬浮和励磁两种作用。当转子在Ⅱ区间内切断绕组电流继而产生感应电动势,此时,A相作为发电相续流发电不再提供悬浮力,其电感位于下降区,同时B相绕组导通提供悬浮力,以30°为一个周期A,B两相交替发电。
电机的每一组绕组单独控制,绕组通过一个整流桥直接向负载提供发电电能。如同SRG 的续流发电阶段相绕组在前半周期励磁,后半周期才续流发电,但电机两相的励磁阶段与发电阶段交替重叠进行。
2 本体设计
2.1 主体尺寸计算公式
本文以12/6极混合转子BSRG一相为例,利用磁路分割法推导了气隙磁导的数学表达式,基于等效磁路的原理将电感矩阵用气隙磁导表示,然后根据磁场储能与电感的关系获得12/6极混合转子BSRG的平均转矩,结合电机理论中转矩与输出功率的关系,得到12/6极混合转子结构BSRG的主体尺寸的解析表达式。

图5 A相绕组的等效磁路
在不考虑转子偏心的情况下,忽略磁饱和及邻相续流发电电流对径向悬浮力的影响。基于图3中的A相绕组电流方向,获得A相绕组的等效磁路如图 5 所示。图中Ns为每极绕组的匝数,ia1~ia6分别为A相6极绕组的电流,φa1~φa6分别为A相6个气隙下的磁通,在考虑到铁心磁路存在磁压降的情况下,采用文献[1-2]中提及的磁路分割法得到A相某个磁极下的气隙磁导:
(1)
式中:δ为气隙长度;r为转子半径;km为铁心磁压降系数;θ为转子位置角;βs为定子极弧角;c= 1.49;l为电机铁心长度;μ0为真空磁导率。
根据磁通连续性定理,可以得到以气隙磁导表示的φa1~φa6表达式,进而推导出各绕组的磁链,最后利用电感与磁链的函数关系,获得A相各绕组间的互感和自身的电感,当6个悬浮绕组电流相等时,设其电流为isa1,此时A相磁场储能表达式改为:
(2)
以12/6极混合转子结构BSRG发电状态下的A相为例,将绕组电流等效为方波推导12/6极混合转子结构BSRG主体尺寸的解析表达式。图6为A相绕组的等效方波电流。图中A相悬浮绕组励磁宽度与绕组续流发电宽度相同,均为15°。在参考绕组电流的变化规律的前提下,设定续流发电电流幅值为绕组电流幅值的2倍。
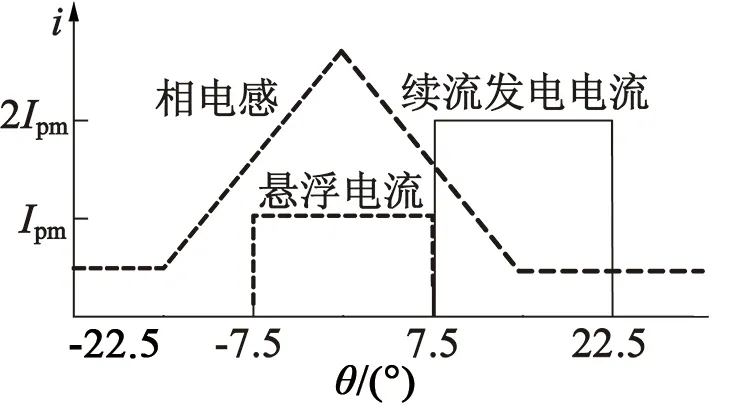
图6 12/6极混合转子BSRG的等效方波电流
图6显示,电机在(-7.5°,7.5°) 区域内悬浮励磁,在(7.5°,22.5°) 区间绕组续流发电产生转矩。A相平均转矩Tavg可用绕组峰值电流Ipm表示:
(3)
(4)
另外,Tavg还可以表示:
(5)
式中:Pem为电磁功率;m为相数;n为转速。
结合式(3)、式(5)用转子外径Da表示可以得到:
(6)
根据基本的磁路定律,绕组磁动势与气隙磁密的关系:
(7)
式中:Bm是电感最大时,isa1产生的最大气隙磁密。
考虑到12/6极混合转子结构BSRG气隙长度相对于转子半径非常小,故在主体尺寸计算时忽略气隙长度的影响。将式(8)带入式(7)即可得到12/6极混合转子结构BSRG主体尺寸计算式:
(8)
2.2 绕组匝数计算
绕组电压为US,转矩功率为Pm,那么:
Ipm=Pm/Us
(9)
则绕组电流的有效值Im:
(10)
式中:k′为电流波形系数。
利用峰值电流来计算匝数,电机最恶劣工况下、电感最大时,气隙合成磁密Bm与磁动势的关系:
(11)
当电机的硅钢片型号以及结构确定之后,Bm也能确定。将式(9)代入(11)可得:
(12)
根据电机的散热条件确定线圈电流密度J,那么导线的截面积Se:
(13)
式中:η为电机效率,kf为电流波形系数。
2.3 径向悬浮力计算
由于电机稳定运行时定子凸极到圆盘的磁阻最小且保持不变,且对绕组电流进行斩波控制以保证电机的对称励磁,转子凸极对悬浮力的影响很小,故考虑悬浮力时仅考虑圆盘受的悬浮力,忽略转子凸极以的影响。
设定子极与圆盘交叠区域面积为A,则:
A=Lsltw
(14)
式中:Ls为圆盘的轴向长度,ltw为定子凸极的宽度。
定子极与转子间的气隙磁导可表示成:
(15)
式中:δ0为转子无偏心时定子极与转子间的气隙长度。
由磁场密度公式知线圈通电后在一个定子极产生的气隙磁场密度:
(16)
式中:φ(x)为定子极气隙下的磁通。
由能量密度公式得:
(17)
转子径向力计算公式:
(18)
因为电机的对称结构,当电机稳定悬浮时径向力合力为零。
3 设计实例
3.1 主体尺寸计算
样机设计目标为:额定转速为10 000 r/min;额定功率1.0 kW;额定电压为DC 50 V;最大径向负载为60 N;铁心材料为35DW250;系统效率不小于0.75;冷却方式为自然冷却;电机采用12/6极混合转子的结构。按电机额定工作点设计,样机的功率为1 000 W,转速n=10 000 r/min。在SRM中,电机的铜损耗约占总损耗的50%[18],类似在BSRM上,电机电磁功率Pem可以表示为Pem=P(η+1)/2η=1167W,结合BSRG的运行特点,取δ=0.25mm,βs=15°,绕组最大气隙磁密Bm=0.8T,kr=0.84,km=1.16,μ0=4π×10-7H/m。将上述参数代入式(8)可得:
(19)
取Da为70 mm,l为68 mm,此时Dal为4 760 mm2,满足设计要求,叠片系数为0.95。
3.2 绕组参数计算
样机每相绕组导通周期角为15°,则绕组峰值电流:
(20)
为获得绕组的匝数,取绕组最大气隙磁密Bm=0.8 T,此时绕组匝数:
(21)
考虑到电流波形系数,并留有一定的余量,绕组额定电流:
(22)
式中:k′=1.2。
在对电机有限元模型分析时,绕组电流密度可取较大值,故选取并绕根数为4根,漆包线直径为0.76 mm的绕组导线。
3.3 圆盘尺寸的确定
当电机稳定悬浮时,绕组内电流相等,此时一个凸极下的悬浮力:
(23)
则由此可得圆盘厚度:
(24)
根据最大径向力要求,为保证径向力拥有充足的裕量,代入径向力F=-100 N,可得圆盘厚度Ls为12 mm。
3.4 基本尺寸的确定
取电机轴径为18 mm,代入上述尺寸计算的定子槽满率为0.44,下表1为样机结构尺寸。

表1 样机结构尺寸
4 电磁性能仿真
利用时步有限元法对样机进行动态电磁性能仿真,对绕组电流斩波控制,且斩波限相等,图7为仿真样机的有限元模型,此时电机对称励磁产生的悬浮力为零。
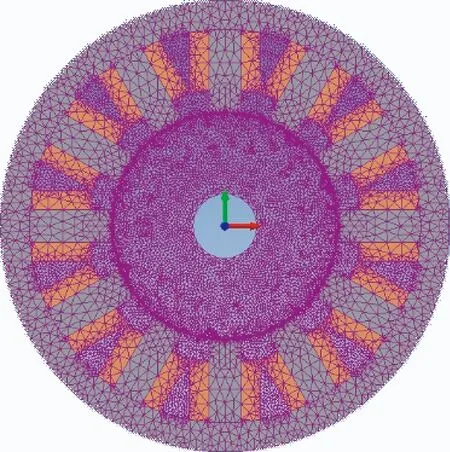
图7 电机有限元模型
图8为额定发电状态下径向悬浮力随转子位置角变化图。由图可知在一个发电周期内径向悬浮力平均值在94 N左右波动,满足电机最大径向负载,接近初始设计值100 N,验证了电机结构尺寸的正确性。
图9为额定发电状态下一个周期内相绕组发电电流仿真图。此时绕组电流为10 A左右,额定负载为4 Ω,转速为10 000 r/min。由发电电流波形可知,电流上升很快,其峰值约为35 A,电流跟预期的相符。仿真中若采用能快速调节输出电流的闭环控制策略,可以提高发电电流质量。
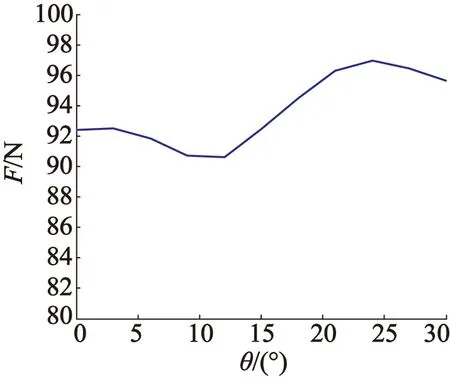
图8 径向悬浮力关于转子位置角曲线
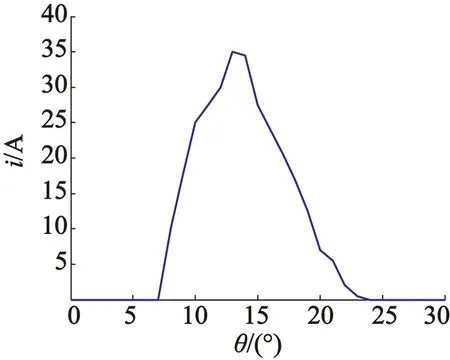
图9 单相发电电流关于转子位置角曲线
5 结 语
本文分析了12/6极混合转子结构BSRG的悬浮原理和发电机理,对其本体设计进行了研究,并建立了电机的有限元模型验证了结构的正确性,得到如下结论:
1) 电机采用12/6极并在转子上叠加圆盘的结构,发电过程中所有转子极均参与发电,转子极制动转矩大,发电出力多,仿真发电电流比同体积同功率12/8极BSRG大,其悬浮相电流对发电相电流影响小,极大的提高了发电效率;
2) 混合转子结构圆盘和转子凸极分别提供悬浮力和制动转矩,结构清晰,控制目标明确,由仿真结果可知悬浮力随转子位置角变化的波动很小,径向负载能力强。
3) 电机的特殊结构能够避免发电阶段电流的不平衡导致悬浮力失稳,制动转矩与悬浮力之间的耦合小,控制算法简单。
[1] TAKEMOTO M,SHIMADA K,CHIBA A,et al.A design and charteristics of switched reluctance type bearingless motors[C]//4th International Symposium on Magnetic Suspension Technology (NASA/CP-1998-207654).Gifu,Japan:NASA LaRC& NHMFL & National Aerospace Laboratory,1998:49-63.
[2] TAKEMOTO M,CHIBA A,FUKAO T.A method of determining advanced angle of square-wave currents in a bearingless switched motor[J]. IEEE Transactions on Industry Application,2001,37(6):1702-1709.
[3] 杨刚,邓智泉,曹鑫,等.无轴承开关磁阻电机平均悬浮力控制策略[J].航空学报,2009,30(3):505-511.
[4] 孙玉坤,吴建兵,项倩雯.基于有限元法的磁悬浮开关磁阻电机数学模型[J].中国电机工程学报,2007,27(12):33-40.
[5] CAI Jun,DENG Zhiquan,LIU Zheyuan,et al.A new flux-linkage model for bearingless switched reluctance motor[C]//Proceedings of 2009 IEEE Inernational Conference on Applied Superconductivity and Electromagnetic Devices.IEEE,2009:250-254.
[6] 范冬,杨艳,邓智泉,等.无轴承高速开关磁阻电机设计中的关键问题[J].电机与控制学报,2006,10(6): 547-552.
[7] 刘泽远,邓智泉,曹鑫,等.全周期无轴承开关磁阻电机的设计[J].中国电机工程学报,2011,25(4):77-83.
[8] 周云红,孙玉坤,嵇小辅,等.一种新型的磁悬浮开关磁阻发电机[J].中国电机工程学报,2011,25(5):107-113.
[9] 孙玉坤,杨凯,朱志莹.一种12/6极混合转子结构磁悬浮开关磁阻发电机及其控制方法:CN 104821698 A[P].2015-08-05.
[10] 吴建华.开关磁阻电机设计与应用[M].北京:机械工业出版社,2000:79-109.
Design of a New Type of Bearingless Switched Reluctance Generator
SUNYu-kun1,2,LIULiang-tian1,YUANYe1
(1.Jiangsu University,Zhenjiang 212013,China;2.Nanjing Institute of Technology,Nanjing 211167,China)
The principles of suspension and generation of a 12/6 hybrid rotor bearingless switched reluctance generator (BSRG) which rotor consists of 6 tooth and a disc axial superposed were introduced in the paper.By using an equivalent magnetic-circuit method, the computational formula of main body for the 12/6 hybrid rotor BSRG,based on the currents in windings were equivalent to square waveforms and combining with the relationship between average torque and electromagnetic power, can be obtained.The expression of the suspension force of the motor is derived without considering the rotor eccentricity.The rotor disc size is obtained based on a radial force margin of the design sample. The number of turns of two windings may be calculated with the relationship between peak values of square currents and magnetic flux density in the gap, respectively. Finally, a prototype was designed with the method presented in the paper; and the finite element analysis verified this design method for the 12/6 hybrid rotor BSRG.
bearingless switched reluctance generator (BSRG); hybrid rotor; levitation force; design
2015-09-25
TM352
A
1004-7018(2016)12-0015-05
孙玉坤(1958-),男,教授,主要研究方向为电能质量和电机智能控制等。
