异步电动机变结构模型参考自适应观测器设计
2016-02-24刘彬
刘 彬
(辽宁石化职业技术学院,锦州 121000)
异步电动机变结构模型参考自适应观测器设计
刘 彬
(辽宁石化职业技术学院,锦州 121000)
为了提高异步电动机调速系统的动态品质,在传统等速趋近率的基础上设计了一种新型趋近律,该方法能够根据系统状态距离平衡点的远近而自适应调整等速趋近律速度,并将该方法应用于速度控制器的设计。另外,为了获得异步电动机的转速信息,设计了一种基于变结构模型参考自适应系统(Variable Structure Model Reference Adaptive System,VS-MRAS)的无传感器矢量控制系统,该方法将滑模速度控制器和VS-MRAS算法相结合,提出了一种适用异步电动机无传感器矢量控制系统的复合控制策略。仿真和实验结果表明,该算法能够有效地提高系统的静态、动态特性与鲁棒性。
异步电动机;无传感器矢量控制;变结构模型参考自适应系统;趋近律方法
0 引 言
随着生产技术的不断发展,人们对电机调速系统的调速范围、动静态性能等都提出了更高的要求。三相交流异步电动机由于其具有结构相对简单、生产制造容易以及运行比较可靠等诸多优点,在生产实际中得到了广泛的应用[1-2]。目前,异步电动机调速系统的控制策略大多仍然采用传统的PI控制器,主要是因为该控制器结构比较简单且参数便于调节。然而,交流异步电动机系统本身是一个比较复杂的非线性系统,为了便于控制器的设计通常采用一定的简化方法对电机的数学模型进行了简化处理,当电机长时间运行或者受到外界扰动的影响时,电机的参数都会发生一定的变化,因此基于此简化模型得到的PI控制器的参数并不能满足电机高性能控制的要求。随着现代控制理论的发展,一些先进的控制理论成果不断地被应用到交流电机调速系统中[3-4]。在诸多先进的控制理论算法中,变结构控制(Variable Structure Control,VSC)作为一种特殊的非线性控制算法,由于其控制器设计简单、鲁棒性强等优点而被广泛应用[3-4]。然而VSC对外界扰动和参数变化的抑制是通过设置较大的切换增益来实现的,切换增益的大小直接决定SMC控制算法的动态性能,但是较大的增益在提高系统的收敛速度的同时,也会带来系统的抖振问题。另外,基于趋近律方法的传统滑模控制器设计方法仍然采用传统的趋近律方法,且系统抖阵现象比较严重。
另外,为了获得满意的高性能交流电机调速系统,通常需要知道准确的转子位置(转速)信息,其中比较简单的做法就是在电机本体上安装机械传感器,但机械传感器的安装一方面会增加成本和电机的尺寸,另一方面机械传感器对使用环境也有比较严格的要求。为了避免机械传感器的使用,可以采用无速度传感器控制策略。为了实现异步电动机调速系统的无传感器控制,一些学者提出了诸如电压-电流模型磁链观测器算法[5]和瞬时无功功率算法[6]等诸多模型参考自适应系统(Model Reference Adaptive System, MRAS)的无速度传感器的调速方法。传统的MRAS算法能够获得较好的控制性能,但该算法通常以电机本体的数学模型为基础,电机参数的准确度直接影响速度辨识的精度,为了获得电机的准确参数,通常需要辨识电机的参数,但参数辨识算法的引入增加了算法的复杂度,并且该算法大多采用PI调节器。
为了解决上述问题,本文在MRAS算法的基础上结合VSC,设计了一种VS-MRAS速度辨识方法,同时将滑模控制应用于转速调节器的设计中,从而提出了一种基于滑模速度控制的VS-MRAS算法,并将此控制算法应用到异步电动机变频调速的矢量控制系统中,最后仿真和实验结果都验证了该算法具有较好的动静态性能,证明了算法的有效性和可行性。
1 新型滑模转速控制器设计
1.1 新型滑模趋近律方法
目前,传统的滑模控制算法一般只考虑系统的状态变量能够逐渐趋近滑模面函数,且设计的控制器满足Lyapunov稳定性条件,并不能反映以何种方式趋近滑模面,而趋近律方法可以保证趋近运动的动态品质。等速趋近律方法作为趋近律方法的一种,其表达式可以表示:

(1)
式中:k为待设计参数,它的大小直接决定滑模面的趋近速度。另外,若参数k的取值太小,则趋近速度较慢,从而会导致趋近滑模面的过渡过程变长;相反,若k取值太大,则到达滑模面引起的抖振较大。为了解决上述问题,文中将设计一种改进的等速趋近律:
(2)

为了分析所设计趋近律算法的控制性能,文中采用式(3)所示的系统为例进行分析。

(3)
选取系统的滑模面函数:
s=Cx
(4)

(5)
将改进的趋近律与传统的等速趋近律进行仿真比较,仿真结果如图1所示。


(c) 滑模面函数s的变化曲线
从如图1所示的仿真结果可看出,相比传统等速趋近律算法,文中所提算法无论是在系统状态变量的收敛速度还是在抖振抑制方面,都具有较好的控制效果。
1.2 滑模速度控制器设计
为了设计电机的滑模速度控制器,首先给出忽略粘性摩擦的影响时的电机的运动方程:
(6)
式中:ωr为机械角速度,J为转动惯量,Te为电磁转矩,Tl为负载转矩。
然后,定义滑模面函数:
(7)

设计滑模速度控制器:
(8)

为了分析控制器的稳定性,定义Lyapunov函数:
(9)
对式(9)求导,并将式(8)代入可得:
(10)

2 变结构模型参考自适应观测器
2.1 基于MRAS的转子磁链观测器设计
首先给出静止坐标系下的转子磁链电流模型:
(11)

由于ω为待辨识的参数,可认为除ω外其余参数都是不变的,由式(11)可得如式(12)所示的转子磁链可调模型,即:
(12)

定义系统的状态误差如式(13)所示,即:
(13)
对式(12)和式(11)作差,可得:
(14)

(15)
式中:Kp为比例增益,Ki为积分增益。ψrα和ψrβ分别由如式(16)和式(17)所示的转子磁链电压模型获得。
(16)
(17)
综上所述,采用基于MRAS的转子磁链观测器算法,将异步电动机的电压模型作为MRAS的期望模型,而电流模型作为MRAS的可调模型,从而构成了转速观测器算法的结构框图,具体如图2所示。
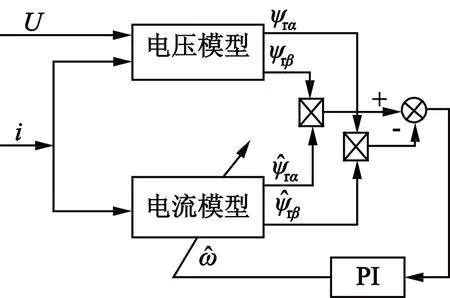
图2 基于MRAS的转速辨识算法
2.2 变结构模型参考自适应观测器
由于MRAS算法的速度观测以参考模型为基础,参考模型本身参数的准确度直接影响速度辨识的精度,为了提高MRAS算法的鲁棒性能,文中将变结构控制和MRAS相结合。首先定义速度观测器的滑模面函数:
(18)
对式(18)求导,并考虑到式(11)和式(12),可得:
(19)
(20)
从式(20)可以看出,当转子磁链的估计值收敛于实际值时,等效速度ωeq将收敛于转速的实际值,从而实现了转速的在线估计。
根据定义的滑模面函数sω和等效速度ωeq,采用改进的等速趋近律方法,可以设计转速的滑模观测器为
(21)
式中:ks为滑摸增益。
由于式(21)中符号函数sgn()的存在,转速估计值存在抖振现象。为了平滑控制信号,选择如式(22)所示的sigmoid函数取代式(21)中的符号函数。
(22)
式中:a是可调正常数。
从而,VS-MARS观测器改写为:
(23)
综上所述,基于VS-MRAS辨识转速算法框图如图3所示。

图3 基于VS-MRAS的转速辨识算法
3 仿真及实验结果分析
本文将滑模速度控制器和VS-MRAS相结合,所提异步电动机调速系统的控制原理如图4所示,主要包括:滑模速度控制器SMC、转矩PI调节器、磁链PI调节器、电流PI调节器、SVPWM算法和基于VS-MRAS算法的转速辨识等构成。
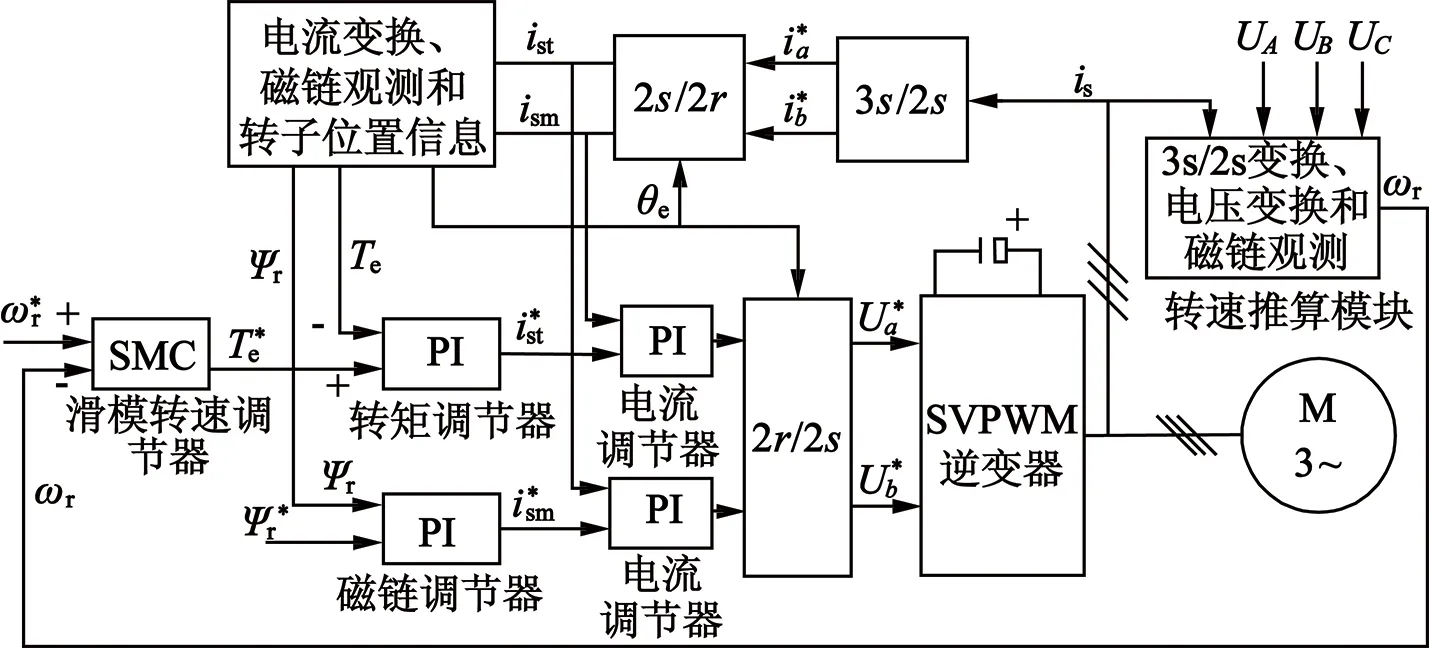
图4 基于变结构控制的异步电动机
3.1 仿真结果分析
为了验证文中所提控制算法的可行性和有效性,利用MATLAB仿真软件的可视化模块,根据图4所示的原理图建立系统的仿真模型。其中仿真模型中的电机参数如表1所示。

表1 仿真模型的主要参数

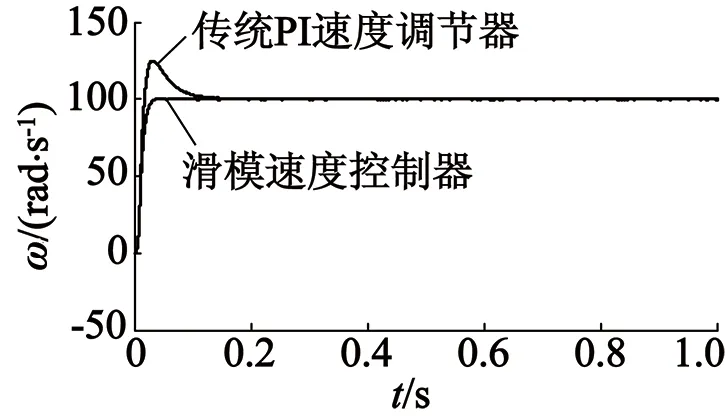
图5 传统PI与滑模控制的转速仿真结果比较
为了验证所提无传感器控制算法的有效性和可行性。图6给出了转子磁链的观测结果,且转子磁链的相图为圆形,图7为采用本文所提算法的仿真结果,其中转速初始值设定为50rad/s,当t=0.5s时转速给定值设为100rad/s。从图7可以看出,基于VS-MRAS的转速辨识具有很好的精度,转速的估计误差基本上为0,验证了所提无传感器控制算法具有较好的跟踪性能。
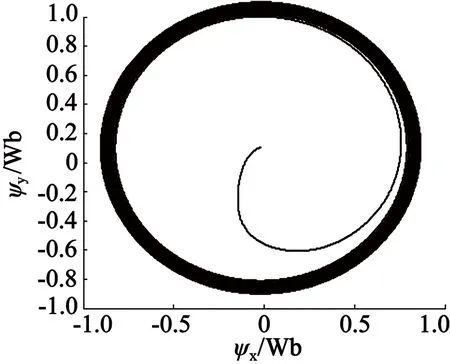
图6 转子磁链相图

图7 基于滑模控制和VS-MARS的电机转速辨识结果
为了验证所提算法的抗扰动特性,图8给出了当转速设定为100rad/s,且在t=0.5s时突加负载转矩Tl= 15N·m时的仿真结果。从仿真结果可以看出,当电机突加负载时转速能够快速的恢复到初始给定值,用时约为0.1s,从而说明所提控制算法具有较好的动态性能和抗扰动能力。

图8 突加负载时转速和电流的仿真结果
3.2 实验结果分析
为了验证所提算法的优越性,图9给出了当转速为1 000 r/min时突加负载时,采用PI速度控制器和文中所提速度控制器的转速响应曲线。从图中可以发现,当突加负载扰动时,如图9(a)所示的PI速度控制器对负载转矩较为敏感,转速存在波动,且恢复到原有转速需要一定的调节时间。相反,如图9(b)所示在文中所提速度控制器的作用下转速波动较小,调节时间较短。从而说明文中所提控制算法的优越性。

图9 突加负载时的转速响应曲线
为了进一步验证所提控制算法的有效性,图10给出了磁链的实验结果,其中实验条件设置为:参考转速为2 000 r/min,且转子磁链的实际值由转子角度和磁链幅值计算得到。另外,图11给出了电机转速估计值与实际值的实验结果,其中实验条件设置

为参考转速由1 000 r/min变化到2 000 r/min。从图中可以发现,观测器可准确地观测电机的磁链值,电机转速的估计值也能准确快速地跟踪实际值,从而说明本文所提算法具有较好控制的性能。
4 结 语
1)为了改善传统等速趋近律的控制性能,设计了一种改进的等速趋近律方法。该方法能够根据系统状态距离平衡点的远近而自适应调整,并将此算法运用到三相交流异步电动机的速度控制器设计中,改善了调速系统的动态品质;
2)建立了基于变结构控制和MRAS观测器算法(VS-MRAS)相结合的异步电动机无传感器控制策略,改善了传统MRAS观测器算法的控制性能;
3)建立了适用于交流异步电动机的基于滑模速度控制器和VS-MRAS观测器算法,该算法提高了系统的动态响应速度和转速的辨识精度。
[1] 祁鲲,厉虹,张巧杰.异步电机调速系统基于灰色预测的模糊PI控制[J].北京信息科技大学学报(自然科学版),2012,27(3):64-67.
[2] 李瀛,胡立坤,卢子广,等.基于串联LPF和滑模自适应的异步电机DTC研究[J].电气传动,2015,45(6):16-19.
[3] 曹靖,童朝南,胡敦利,等.基于MATLAB/Simulink步电机滑模控制系统仿真[J].北方工业大学学报,2015,27(1):42-50.
[4] 钟义长,钟伦珑,黄峰.基于滑模变结构的异步电机矢量控制及实现[J].电气传动自动化,2009,31(6):7-9.
[5] 陆文斌.基于电压电流模型磁链观测器的感应电机无速度传感器控制研究[D].杭州:浙江大学,2013.
[6] 张莹,黄科元,黄守道,等.基于瞬时无功功率的感应电机矢量控制仿真研究[J].系统仿真学报,2012,24(10):2141-2145.
[7] 洪乃刚.电力电子、电机控制系统的建模与仿真[M].北京:机械工业出版社,2009.
[8] 孟兆博.基于MRAS异步电机无速度传感器矢量控制系统的研究[D].哈尔滨:哈尔滨理工大学,2010.
[9] 许连丙.基于DSP的异步电机无速度传感器矢量控制系统的研究与实现[D].太原:太原理工大学,2010.
[10] 高林,杨荣峰,张家皖,等.一种感应电机转子时间常数MRAS的在线辨识方法[J].电工技术学报,2012,27(4):49-53.
[11] 许思猛,陈冲.基于自抗扰控制技术的感应电动机MRAS 转速估计研究[J].福州大学学报(自然科学版),2011,39(6):887-891.
A Novel Sensorless Vector Control Based on Variable Structure Model Reference Adaptive Observer for Induction Motor
LIUBin
(Liaoning Petrochemical Vocational Technology College,Jinzhou 121000,China)
To improve dynamic quality of asynchronous motor speed servo system, a novel reaching law method was designed to solve the existing problem in traditional equal-speed reaching law, which could adaptively adjust according to the state variables' distance to the equilibrium position. Moreover, the principle of variable structure model reference adaptive system (VS-MRAS) was employed to obtain the rotor speed information based on asynchronous motor mathematical model, and the hybrid control technology combining with sliding-mode speed controller and VS-MRAS method was designed to improve the control performance, which was suitable for sensorless vector control of asynchronous motor speed servo system. Simulation and experiment results show that the novel hybrid controller can improve steady, dynamic performances and robustness of speed servo system obviously, compared with traditional PI speed controller.
asynchronous motor; sensorless vector control; variable structure model reference adaptive; reaching law method
2016-03-16
王双岭(1981-),男,硕士,讲师,主要研究方向为机电控制、嵌入式系统、机器人技术。
TM343
A
1004-7018(2016)12-0093-05
