微网快速开关系统驱动电路的研究
2016-02-23邹云飞王慧贞牛先智
邹云飞, 王慧贞, 牛先智
(南京航空航天大学 自动化学院,江苏 南京 210016)
微网快速开关系统驱动电路的研究
邹云飞, 王慧贞, 牛先智
(南京航空航天大学 自动化学院,江苏 南京 210016)
针对新型微网系统FREEDM(Future Renewable Electric Energy Delivery and Management)中的快速开关系统,提出了一种新型的IGBT驱动控制电路。将IGBT应用于FREEDM的快速开关系统中,根据其在不同故障状态下的不同关断特性,利用集电极退饱和原理,研究设计了具有双故障检测支路的IGBT驱动控制电路,从而保证IGBT在FREEDM中的可靠关断。最终通过Saber仿真和实验验证了驱动控制电路能够在各故障状态下可靠地关断IGBT。
FREEDM;IGBT;快速开关;集电极退饱;双检测支路
0 引 言
由于煤炭、石油等不可再生能源日渐枯竭以及以风能、光伏发电为代表的新能源发电成本的降低,需要一种能够适应新能源发电的新型电网。美国北卡罗莱纳州立大学提出了一种智能微型电网的架构FREEDM(Future Renewable Electric Energy Delivery and Management)[1]。FREEDM中没有传统发电机、电磁变压器等装置,因此系统惯性小,阻尼小,响应迅速,需要用固态断路器取代传统的机械式开关[2]。
目前,许多国外研究机构组织专家对基于电力电子器件的固态断路器进行开发。ABB公司对IGCT进行大量的研究,研制了兆瓦级的固态断路器,并成功用于实践[3]。德国RWTH-Aachen大学针对固态断路器的不同的拓扑结构进行了大量的仿真研究和实验验证[4]。针对不同的功率管,重点研究固态开关的损耗和控制方式[5]。而对于微网系统中的不同的短路电流状况,应用不同的IGBT的固态断路器的主电路拓扑结构[6-7]。但在一般文献均没有对IGBT的驱动控制进行详细地研究与设计,而一般应用于功率变换场合中的传统IGBT驱动控制电路主要针对高频率开关,快速的关断过程会导致微网系统中短路电流变化率较大而有锁定IGBT的风险,而且也不具备限制故障电流的能力,因此并不适用于该应用场合。
本文针对微网固态开关的应用场合,对现有的IGBT驱动电路进行分析[8-9],提出了一种适用于新型微网系统FREEDM中的具有双检测支路的新型IGBT驱动控制电路。针对微网系统中不同的故障状态(过负载故障与短路故障状态),该驱动控制电路能够产生相应的驱动控制信号,从而保证IGBT可靠地关断。本文对该新型的IGBT驱动控制电路进行了参数设计,并通过仿真验证了其可行性。最后,搭建了以1 200 V/75 A(2MBI75UA-120)的IGBT集成模块为核心元件的快速开关系统的实验平台,在此基础上,通过实验进一步验证了该IGBT驱动控制电路的可行性。
1 基于IGBT断路器的关断特性研究
1.1 IGBT关断过程分析
在微网系统中,不同的故障状况对应着IGBT不同的关断特性,而其关断特性则体现于IGBT工作点的转移情况。基于IGBT的关断时间toff分为关断延迟时间td和电流下降时间tf,根据有无关断延迟时间td,分为两种关断情况[10]:
(1)在关断正常负荷电流或过负载电流时,IGBT工作点由A点转移至B点(如图1所示),由于IGBT工作于饱和区,IGBT的伏安特性由外部电路决定。此时,要求栅极电压下降至一定电压值,IGBT的工作点进入放大区的D点后才逐渐关断电流。整个关断过程中,IGBT工作点的变化轨迹如图1中的折线BDE所示,其中IGBT的工作点从饱和区转移到放大区的过程构成了关断延迟时间td。

图1 IGBT特性曲线
(2)在关断短路电流时,IGBT工作点已由A点转移至C点(如图1所示),IGBT 工作点已处于放大区,短路电流受IGBT的输出特性约束,其大小由IGBT 栅极电压所决定。在切断短路电流的过程中,随着IGBT栅极电压的降低,短路电流逐渐减小至零。其中,IGBT工作点的变化轨迹如图1中的射线CF所示。由于IGBT在关断过程中始终在放大区,故不存在关断延迟时间td。
1.2 微网系统中不同故障状态下的IGBT开断过程
在过负载故障状态下,对应于微网系统中IGBT特有的关断过程,可得到该状态下IGBT整个开通与关断过程的波形示意图,如图2所示。

图2 过负载状态下IGBT开断示意图
其中时间[t1,t2]为电流上升的阶段,t2时刻电流上升至过负载故障电流检测阈值if,此时进入时间[t2,t3]内的限流阶段,之后对IGBT进行软关断,使得流经IGBT的电流ice逐渐降低,最后拖尾至零。在时间[t3,t4]内,由于电流的降低使得IGBT两端产生一定的过电压, 最后逐渐稳定至母线电压Vdc。

图3 短路状态下IGBT开断示意图
同样地,在短路故障状态下IGBT开断示意图如图3所示,在时间[t1,t2]内故障电流迅速上升,在t2时刻故障电流上升至短路故障电流检测阈值isf(isf大约为额定电流的2~3倍)时直接对IGBT进行软关断,此时故障电流逐渐降低至t3时刻,最后拖尾至零。同样地,在时间[t2,t3]内,由于电流的降低使得IGBT两端产生过电压,最后逐渐稳定至母线电压Vdc。
2 IGBT驱动控制电路研究设计
2.1 IGBT驱动特性与驱动控制要求
2.1.1 IGBT驱动特性
在快速开关系统的应用场合中,器件关断后有较长的散热时间,因此一般不会发生雪崩电压击穿导致的IGBT损坏现象。为防止IGBT进入锁定状态,可通过降低IGBT关断时的电流大小与电压变化率来实现,途径有两个:(1)降低关断前故障电流大小;(2)采取慢关断措施,即在IGBT所能承受的短路时间内,逐渐减小栅极电压VGE,使IGBT缓慢地关断。
2.1.2 IGBT驱动控制要求
根据IGBT的关断特性与驱动控制要求,可给出该场合中所需的驱动电压波形。
图4(a)为发生过负载故障时,IGBT可靠关断所要求的理想栅射极驱动电压波形。在t1时刻检测到故障之后立降栅压,一段延迟时间至t2时刻开始软关断过程,直至IGBT关断电压,t2至t3的时刻区间为软关断持续时间。
图4(b)为发生短路故障时,IGBT可靠关断所要求的理想栅射极驱动电压波形。在发生故障之后,经过[t1~t2]时间的检测过程后直接缓慢降低栅射极电压至关断电压。减缓IGBT的关断速度,降低电压应力。
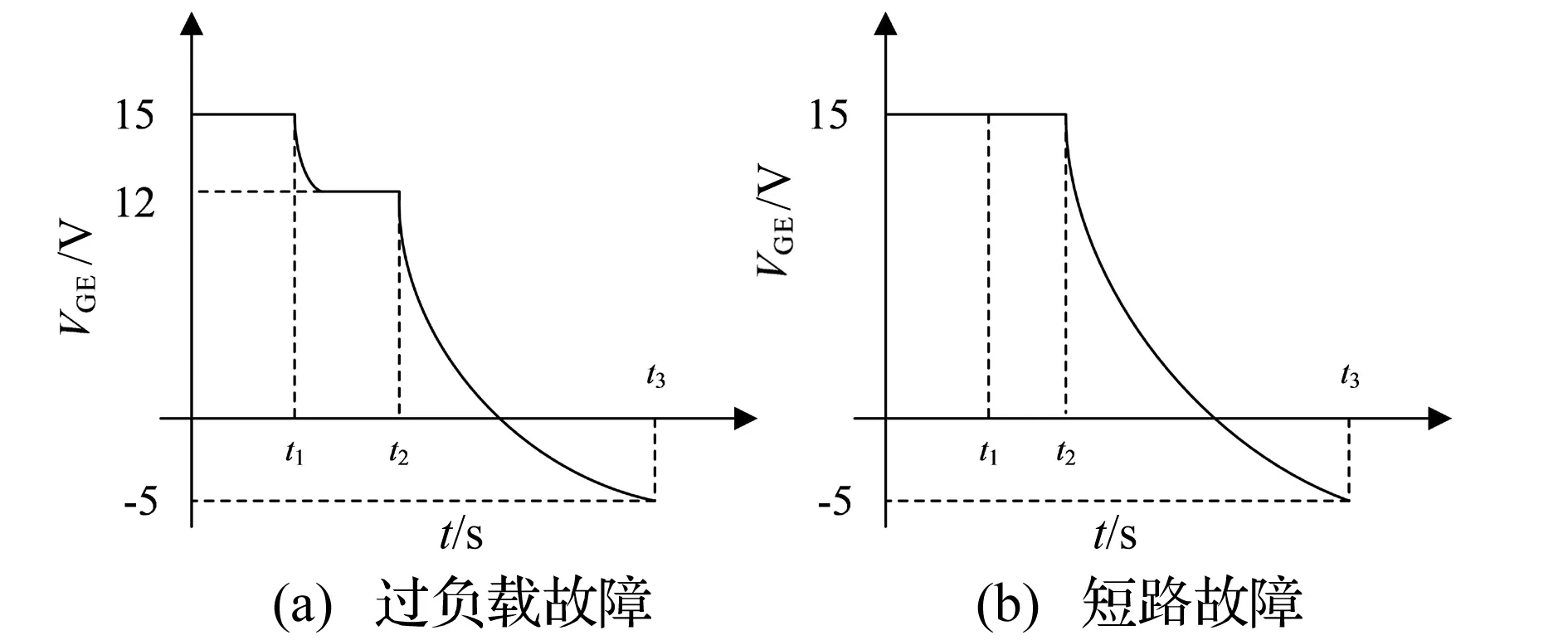
图4 IGBT的理想控制驱动电压
2.2 新型IGBT驱动控制电路设计
按章节2.1.2节所述驱动控制要求所设计的IGBT驱动控制电路,如图5所示。

图5 IGBT驱动保护电路
该驱动控制电路存在两条故障检测支路,可针对不同的故障状态产生相对应的驱动控制电压,从而可靠关断IGBT。
2.2.1 电路驱动保护原理
(1)正常工作过程
当输入高电平控制信号时,光耦导通,使T1和T2截止,此时D点电压上升至20 V,T8、T10导通。而F点电压被钳位于5 V,因此IGBT的栅射极电压为15 V,IGBT导通后VCE下降至VCES(约3 V)。同时,由于IGBT集电极电压较低,A点和B点电位被箝位在一定的电压值,稳压管VZ1、VZ2、VZ3均不被击穿,两条故障检测与保护电路均不动作;当输入低电平控制信号时,光耦截止,使T1、T2导通,D点电位钳位于0 V,T8、T10截止,T9、T11导通,IGBT栅射极间电容迅速放电,IGBT栅极电压迅速下降至0 V,从而产生VGE=-5 V的关断栅射电压。
(2)过流故障保护
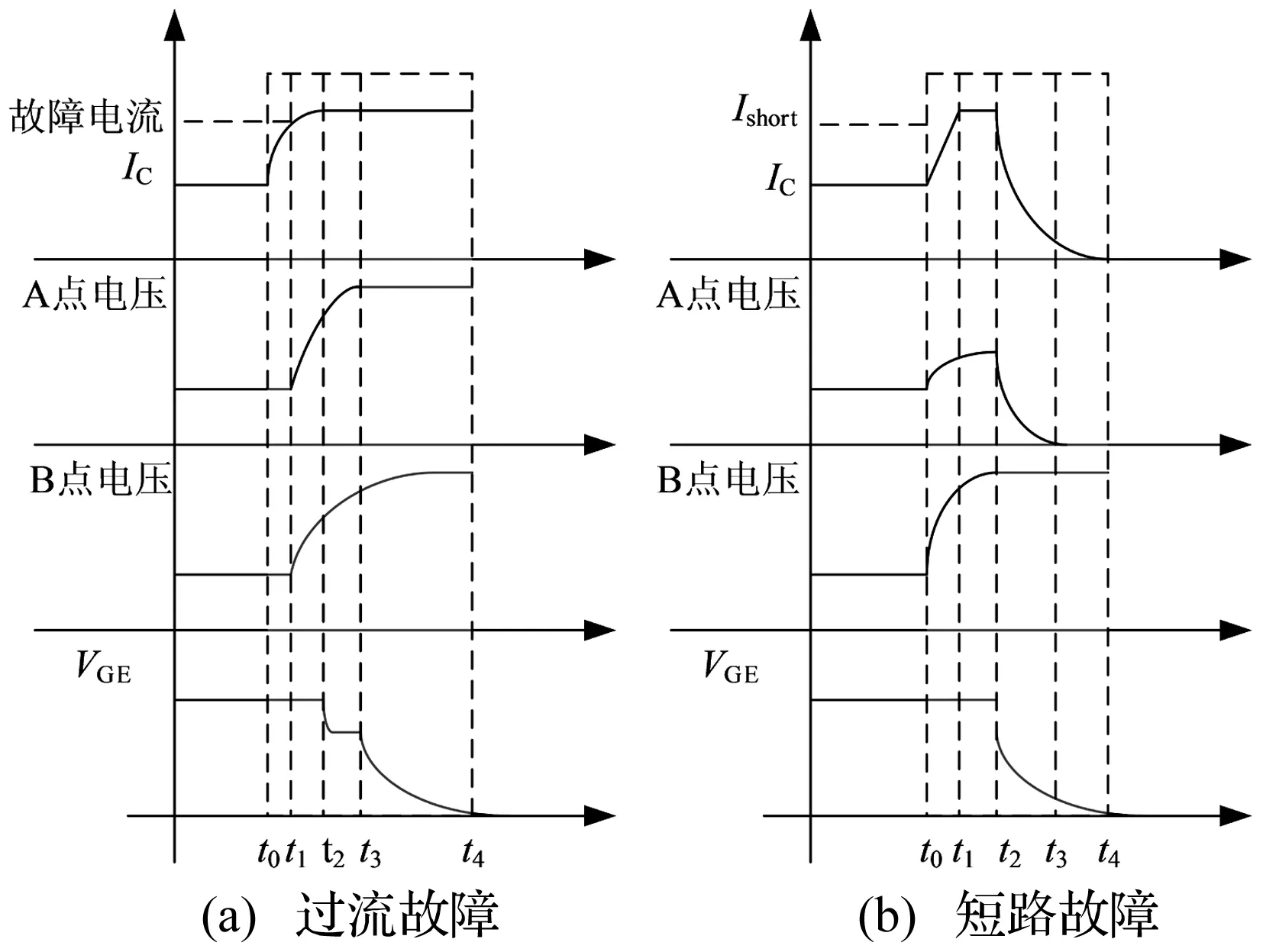
图6 驱动控制电路各点信号时序图
过流状态下故障电流上升比较缓慢。根据图6(a)时序图,在t0时刻电流开始上升,在t1时刻,IGBT集电极和A点电压升至VZ1击穿电压使其导通,T4、T5导通,稳压管VZ4击穿导通,从而实现IGBT的快速降栅压的过程。t2时刻,A点电位上升至稳压管VZ2击穿电压而B点未至稳压管VZ3击穿电压,电容C4通过导通的晶体管T3与电阻R9放电,从而逐渐降低栅射极电压VGE,实现IGBT的慢速关断。
(3)短路故障保护
如图7(b)所示时序图,短路电流上升很快,t1时刻流过IGBT的电流达到短路电流阈值,经过短暂的故障判断时间,在t2时刻B点电压上升至稳压管VZ3击穿电压值,而A点电压并未上升至对应稳压管击穿电压,T3、T4、T5均未导通,此时不存在降栅压的过程,而T6导通,电容C4通过T6和电阻R10放电,缓慢降低IGBT栅压,可靠关断IGBT。
2.2.2 电路驱动主要参数计算
(1)过流支路参数设计
由上小节分析可知检测时间则由电阻R5、电容C3以及稳压管VZ1决定,而所降栅压大小由稳压管VZ4的稳压值决定。A点电压为12 V,在发生过负载故障时,该电路存在故障检测阀值与检测时间的设定。检测时间设计为1.5 μs,A点电压如式(1),其中τ1=R4C3。
VA=20(1-et/τ1)+12e-t/τ1
(1)
在该故障状态下的IGBT整个关断过程还包括降栅压延迟时间,VZ1和VZ2的稳压值与降栅压延时时间的关系如式(2)所示,其中τ1=R4C3。
VZ2=20(1-et/τ2)+VZ1e-t/τ2
(2)
而之后的软关断的时间由τ3=R9C4确定,公式如(3)所示:
6.6=20e-t/τ3
(3)
(2)短路负载参数设计
短路驱动保护时,只有一段软关断过程。和过流支路软关断过程相似,软关断时间与R10,C4有关。
3 仿真分析验证
根据2.2章节所设计的驱动控制电路结构,在Saber仿真环境中搭建相应的原理电路图并设置各器件参数,然后进行仿真分析,验证其可行性,其中驱动开通电压为15 V,关断电压为-5 V。
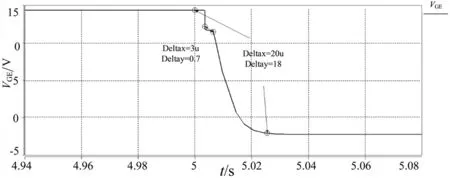
图7 过负载故障时,IGBT的驱动电压波形

图8 短路故障时,IGBT的驱动电压波形
对应于微网系统中不同故障状态,分别模拟过负载故障的状态与短路故障状态(集电极电压上升速率和检测阈值),得到如图7、图8所示的IGBT栅极驱动电压波形图。图7为过负载故障时的关断驱动波形,降栅压过程中,电压下降为3 V,持续时间为5 μs,整个软管段时间为20 μs。而图8是短路故障时的关断驱动电压波形整个软关断时间为20 μs。
4 故障实验验证分析

图9 交流驱动实验电路拓扑
图9所示电路拓扑为以1 200 V/75 A的IGBT模块为核心的快速开关系统的实验平台,在无缓冲电路时验证IGBT驱动电路在故障发生后降低电压应力的可行性。实验拓扑如将二极管D2阴极接入直流电压源,调整该直流电压,分别模拟过负载故障状态和短路故障状态,其中US为电网电压,Ro为1 Ω,模拟线路杂散电感LS为100 nH。
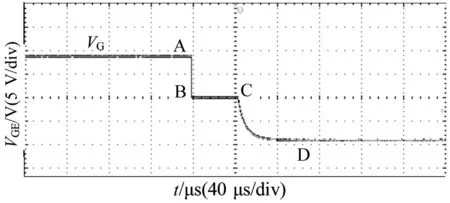
图10 过负载故障状态下, IGBT驱动电压波形

图11 短路故障状态下, IGBT驱动电压波形
过负载故障状态下的IGBT驱动控制电压实验波形图如图10所示,而短路故障状态下IGBT驱动控制电压实验波形如图11所示,该IGBT驱动控制电路对应于不同故障状态所产生的驱动控制电压变化趋势与仿真和理论分析一致。
为适应不同功率等级和驱动保护要求,在该驱动控制电路中可通过选择不同的稳压管来调节所降栅压的大小。
该驱动保护电路针对于微网系统中不同的故障状态均能有效地产生相应的IGBT驱动控制电压。而且通过改变该驱动控制电路中的驱动控制以及满足不同短路故障检测要求的效果。

图12 过负载故障下的主电路实验波形图

图13 短路故障下的主电路实验波形图
同样地,通过改变负载来模拟过负载故障与短路故障状态,从而得到两种故障状态下的主电路实验波形图12和图13所示。
根据图12所示实验波形可看出,在过负载故障状态下,IGBT的关断存在降栅压过程,且在降栅压后能够有效地限制故障电流的大小,同时在延迟后实现了软关断的过程,抑制了过电压的产生。而如图13所示,在电流达到短路故障检测阈值)时,IGBT驱动控制电路直接逐渐降栅压进行软关断,使得电流逐渐较小而抑制过电压的产生。
5 结束语
该IGBT驱动保护电路针对不同的故障状态能够产生相应的驱动控制电压,从而应用于新型微网系统的快速开关中,保证IGBT的可靠关断。同时可调整该驱动控制电路中的部分器件与相
应参数来适应实际中不同的IGBT模块与系统的保护要求,实现IGBT降栅压过程的可调,软关断过程持续时间的可调以及短路故障检测电压的可调。但在实际应用中,针对不同的电流等级,研究降栅压的影响,还需对软关断时间进行系统优化,达到既能减小电压应力又能满足微电网快速性的要求。
[1] HUANG ALEX Q.Renewable energy system research and education at the NSF FREEDM systems center[C]. IEEE Power and Energy Society General Meeting,PES ’09. Calgary,AB,Canada,2009(7):1-6.
[2] 张明锐,刘金辉,金鑫.FREEDM微型电网及其继电保护研究[J].电力系统保护与控制,2011,39(7):95-99.
[3] KRSTIC S,WELLNER E L,BENDRE A R,et al.Circuit breaker technologies for advanced ship power systems[C].ESTS ’07 IEEE Electric Ship Technologies Symposium,2007.Arlington,VA,2007(5):201-208.
[4] 吕婷婷,段玉兵,龚宇雷.微电网故障暂态分析及抑制方法研究[J],电力系统保护与控制,2011,39(2):102-107,130.
[5] 吕玉详,张志强,袁阔.新型智能固态断路器研制[J].电力自动化设备,2008,28(9):112-114.
[6] 周华,孟晨,张占军,等.智能电网及高压开关设备技术发展[J].电气技术,2010,11(8):25-27.
[7] LEFEBVRE S,MISEREY F.Analysis of CIC NPT IGBT’s Turn-off operations for high switching current Level[J].IEEE Transactions on Electron Devices,2002,6(8):1042-1049.
[8] SUNG W,HUANG A Q,BALIGA B JAYANT.A novel 4H-SiC IGBT structure with improved trade-off between short circuit capability and on-state voltage drop[C].Power Semiconductor Devices & IC’s (ISPSD),2010.International Symposium on Hiroshima,2010.
[9] 邓夷,赵争鸣,袁立强,等.适用于复杂电路分析的IGBT模型[J].中国电机工程学报,2010,9(30):1-7.
[10] 张明锐,金鑫,刘金辉,等.基于IGBT的固态断路器的开断策略研究[J].电力系统保护与控制,2012,40(18):123-126.
A Study on the Drive Circuit in the Fast Switching System of Micro Grid
Zou Yunfei, Wang Huizhen, Niu Xianzhi
(College of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing Jiangsu 210016, China)
With respect to the fast switching system in the new micro grid system FREEDM (Future Renewable Electric Energy Delivery and Management), this paper proposes a new IGBT drive control circuit. The IGBT is used in the FREEDM fast-switching system. Based on its different switching-on/off characters in different fault conditions, by using collector off-saturation principle, this paper gives a design of an IGBT drive control circuit with double fault detection branches, thus ensuring reliable switching-on/off of the IGBT in the FREEDM. Finally, through Saber simulation and experiment, it is verified that the drive control circuit can reliably switch off the IGBT in different fault conditions.
FREEDM; IGBT; fast switch; collector off-saturation; double fault detection branches
10.3969/j.issn.1000-3886.2016.05.036
TM761
A
1000-3886(2016)05-0115-04
邹云飞(1990-),男,安徽芜湖人,硕士生,研究方向为IGBT驱动与IGBT串联应用研究。
定稿日期: 2016-02-29
