“高分四号”卫星相机镜头像质检验技术
2016-02-23王昀李凌谷振宇王跃练敏隆
王昀 李凌 谷振宇 王跃 练敏隆
(北京空间机电研究所,北京 100094)
“高分四号”卫星相机镜头像质检验技术
王昀 李凌 谷振宇 王跃 练敏隆
(北京空间机电研究所,北京 100094)
大口径相机由于比刚度低等原因,结构重力变形较大。重力造成的波前误差不可忽略,装调测试必须要重点关注,采用特定的方法测试、验证镜头的零重力波前误差,以保障在轨飞行重力释放时相机能够实现较好的成像品质。文章针对“高分四号”卫星相机镜头的重力变形情况进行了分析,主要包括镜头敏感元件的公差分析、次镜及前镜筒组件的结构力学仿真分析。通过分析确定镜头重力变形的敏感位置以及重力变形的量级,在装调测试过程中使用光轴水平旋转测试以及光轴垂直测试对镜头的零重力像质进行检验,两种状态的测试结果相互印证,与仿真结果吻合。
零重力 遥感镜头 光学测试 相机装调 “高分四号”卫星
0 引言
“高分四号”卫星搭载的地球静止轨道凝视相机同时具有可见光近红外成像通道和中波红外成像通道,可见光近红外通道实现地面像元分辨率 50m;中波红外通道实现地面像元分辨率 400m。相机采用面阵凝视成像方式,通过卫星平台的姿态指向实现视场切换和大范围的观测。
地面装调测试过程中,由于受到重力影响,镜头结构会产生重力变形[1-4],导致镜头中光学元件的位置和面形发生变化。由于镜头属于中等口径光学系统,经过分析面形受到重力变形的影响较小,对系统像质没有影响。而通过仿真分析次镜的重力变形造成的刚体位移较大,接近次镜公差要求的水平,对系统有一定的影响,为了保证镜头的在轨成像品质,需要实际测试零重力像质,确保重力造成的变形对像质影响较小,能够满足相机在轨光学传递函数的指标要求[5-10]。
1 镜头光学系统简介
“高分四号”卫星地球静止轨道凝视相机镜头光学系统构型布局如图1所示。可见光近红外通道与中波红外通道共用RC双反射镜主光学系统,由主镜和次镜组成。主光学系统的波前误差对两个通道都有较大的影响,而可见光近红外通道由于分辨率较高,对主光学系统的波前误差要求小于1/15λ(λ为波长,λ=632.8nm),公差严格,对重力变形也更为敏感,因此本文的分析、测试工作主要针对可见光近红外通道开展。
通过对镜头系统结构进行静力分析,获取各光学部组件在重力场作用下的刚体位移和面形变化情况,并与光学设计的公差要求进行比对,筛选出对系统波前误差影响较大的零部件及指标。最终确定重力场影响下对波前误差影响较大的指标是主光学系统的次镜刚体位移以及倾斜偏转,这是因为:一方面次镜的公差较为敏感,微小的平移和偏转都会导致较大的像质下降;另一方面次镜的支撑结构采用了特殊的设计以降低振动响应,导致其刚度相对较弱,支撑结构容易产生较大的重力变形,次镜及支撑结构如图2所示。
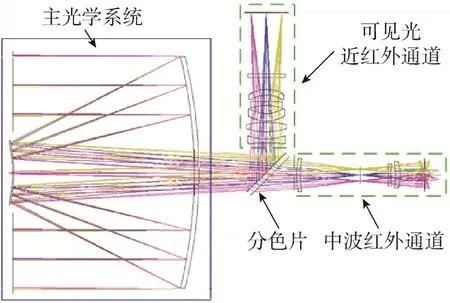
图1 光学系统组成Fig.1 Optical layout
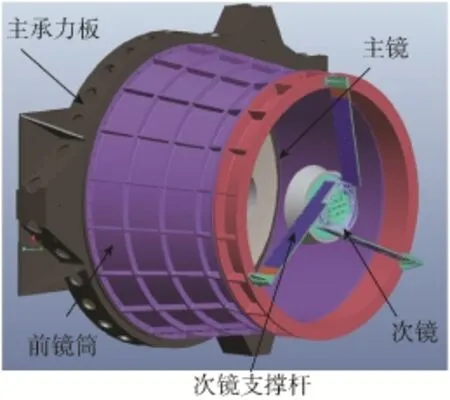
图2 相机结构模型Fig.2 3D model of camera
2 次镜位置的公差分析
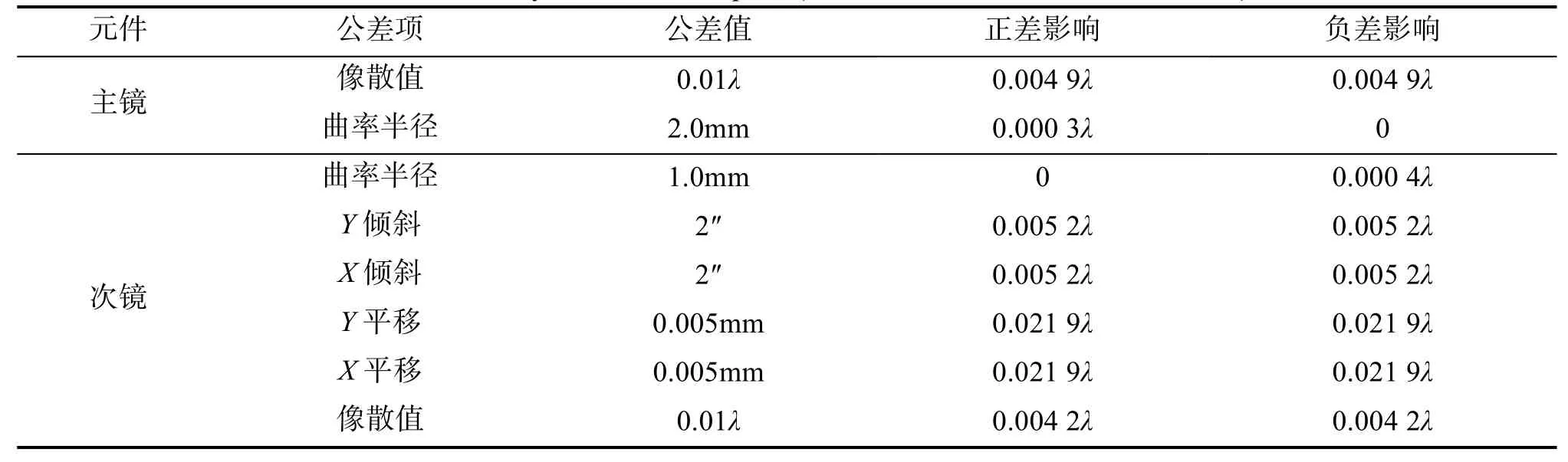
表1 主光学系统光学元件公差及灵敏度结果(中心视场波前均方根误差)Tab.1 Sensitivity table of main optics (RMS wave front error of centre field)
为了研究影响主光学系统波前误差的因素,以光学系统波前均方根(RMS)误差为指标,分析了主光学系统的公差及灵敏度(见表1),根据公差分析主光学系统波前误差97.7%概率为0.023 5λ。由表1的灵敏度结果可以看出,次镜的平移对主光学以及整个系统的波前误差影响最大。由于相机结构的尺寸较大,次镜的平移公差较难满足,因此结构设计时需要保证次镜的重力变形刚体位移处于较低水平,同时还需要进行测试确定光学系统的零重力波前误差。
3 次镜组件力学仿真分析
次镜组件采用“蘑菇头”方案,即次镜框与次镜的配合圆周小于通光口径,次镜框与次镜在次镜的“蘑菇头”脖颈处通过胶斑连接。由于次镜重心位于镜面后,与胶斑有一定轴向距离,次镜入框水平状态下会由于重心偏移造成次镜倾斜,顶部沿轴线方向位移为-1.47μm,底部沿轴线方向位移为 1.44μm,如图3所示,换算为次镜倾斜量约2.8″。
由于前镜筒较长,重力变形造成的次镜下沉也需要考虑,如图4所示。次镜最大位移为5.85μm(位于次镜顶点),最小位移为5.25μm(位于次镜背部)。综合仿真结果:次镜在重力作用下的刚体位移为平移偏心5.9μm,倾斜偏心2.8″。
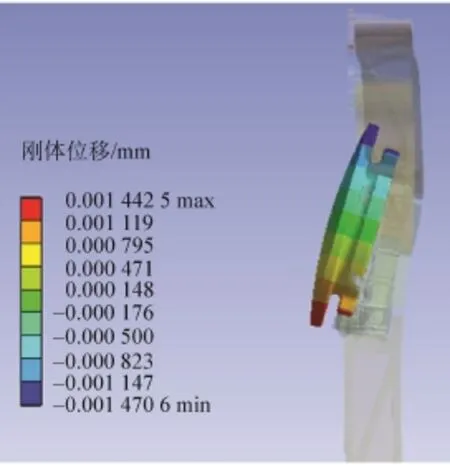
图3 次镜组件的刚体位移分析结果Fig.3 Structural analysis result of M2 assembly
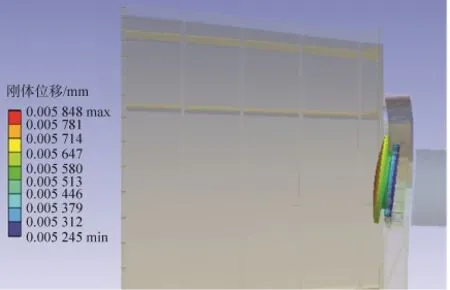
图4 前镜筒组件的刚体位移分析结果Fig.4 Structural analysis result of front optical assembly
4 镜头零重力像质检测方法
针对镜头的零重力像质检测,目前国际上通行的做法有两种:旋转测试和垂直测试。旋转测试主要原理是重力变形与零重力像质相互变化,依靠数据处理剥离重力变形;垂直测试的原理是同轴光学系统在光轴竖直时各反射镜没有垂轴方向的重力变形,据此可以获取零重力状态的共轴像质。“高分四号”卫星相机镜头零重力像质检验采用旋转测试为主,垂直测试复验的技术路线,重点是旋转测试。
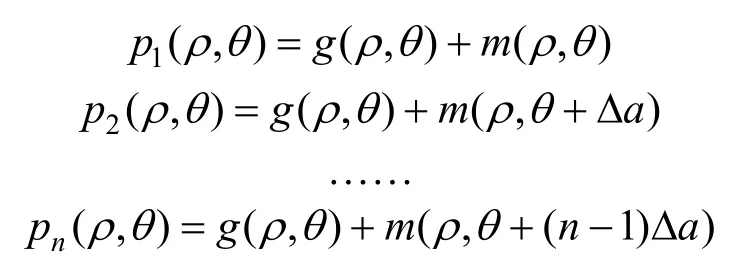
一般情况下镜头进行干涉测量时忽略重力的影响,认为测试结果就是镜头的波前误差。实际上地面测试获取的波前误差分为两个部分:一部分为镜头自身的波前误差或者叫零重力波前误差;另一部分是镜头受重力影响造成的波前误差,简称为重力波前误差。前者是镜头自身的误差,后者是地面测试时叠加的误差。计算公式为

式中 p为测试获取的波前误差;g为重力波前误差;m为镜头的零重力波前误差。波前误差是波面上各个点波前(相位)误差的集合,测试时使用X、Y、Z坐标表示,其中X、Y是测量采样点在波面上的位置坐标,Z代表该采样点的波前(相位)误差值。用函数描述波前误差则可表述为Z(X,Y),表示波前误差Z是采样点坐标X、Y的函数。通常情况下为了便于采用泽尼克系数分析波前误差,需要将X、Y、Z坐标表示的波前误差转换为极坐标方法表示,即将笛卡尔坐标(X,Y)转换为极坐标(ρ,θ),此时Z(X,Y)即可转换为Z(ρ,θ)[11-14]。本文采用上述数学方法表述波前误差,p、g、m为极坐标函数描述的波前误差。
根据上述定义,进行一次镜头的波前测试即可获取镜头波前误差p1。

然后镜头绕光轴旋转β角再次测试波前误差,获取测试波前误差p2,由于支撑及重力方向不改变,则g不变,镜头零重力波前误差极径ρ不变,极角θ旋转β角,式(1)转换为

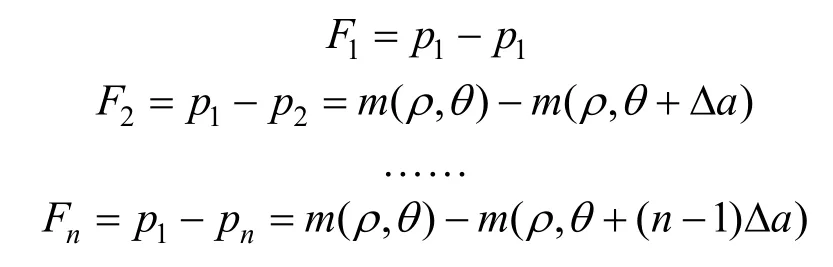
两次测试结果相减,可以消去重力支撑变形:

旋转n次并进行镜头波前测试,每次转过角度为Δa,其中nΔa=2π ,则有
为了便于表述,定义Fn=p1-pn,代表两次测量的波前误差相减的结果:
再求平均得

式(2)左边化简得

式(1)减去式(3)有

式(4)表明,镜头绕光轴旋转多个方向测试结果的算术平均就是重力波前误差以及球差的和。而一般光轴水平测试重力波前中的球差成分可以忽略,可以将算术平均结果去除球差直接看作重力波前误差。
5 镜头零重力像质检测试验
“高分四号”卫星相机镜头零重力像质检验分为两个部分进行:1)在镜头正式装调之前,使用旋转测试技术确定次镜组件包括前镜筒造成的重力变形的影响,确定装调时预置的偏心量;2)镜头装调完成后进行垂直检测,利用垂直状态下次镜组件没有垂轴偏心的特点确定系统最终的零重力像质。
镜头旋转测试时利用工装将偏置的透镜组变成同轴状态,分析发现此环节重力变形造成的透镜组偏转远远小于公差要求,因此透镜组的重力变形影响在测试过程中可以忽略不计。整个测试的配置如图5(a)所示,透镜组的支撑工装如图5(b)所示。采用球面干涉仪加平面镜的配置,旋转镜头测试不同状态,初始方向如图2所示,测试镜头的波前误差。然后镜头绕光轴旋转60°测试,共旋转测试了6个方向,每个方向测试中心视场波前误差。测试时干涉仪、平面镜以及镜头的支撑的状态保持不变。

图5 系统光轴水平旋转测试Fig.5 3D layout of system axial horizontal rotation test
测试获取的波前误差是无序的散点数据,必须进行数学描述才能进行分析、运算。通常测试所得的波前误差使用泽尼克多项式进行拟合,将波前误差转换为泽尼克系数,泽尼克系数单位与波前误差单位相同[15-18]。由于泽尼克多项式的正交特性,测试波前误差先累加求平均再分解为泽尼克系数的结果,与先分解成泽尼克系数再累加平均泽尼克系数结果一致。
因此本文采用先将测试波前误差分解成泽尼克系数,再求泽尼克系数平均值的方法分析数据。测试的结果如表2所示。将6个方向的测试波前误差分解为泽尼克系数列出,此处只列出了关心的低阶泽尼克系数,分别是:第5、6项代表像散,第7、8项代表彗差,第9项代表球差。
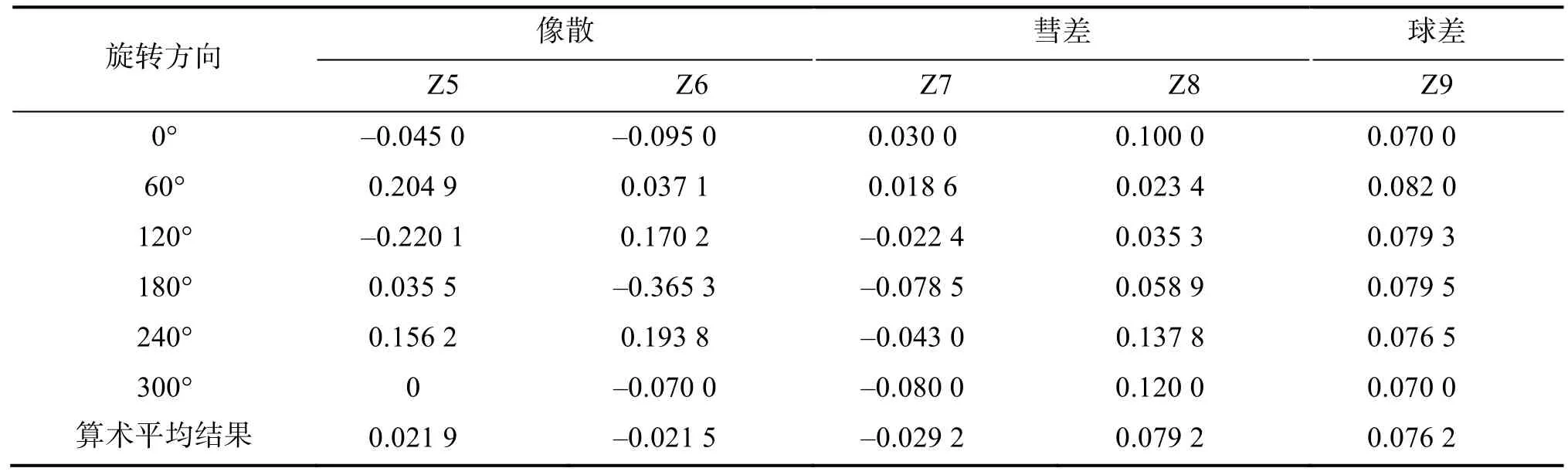
表2 旋转测试结果Tab.2 Result of rotation test
由式(4)可知,6个方向测试的结果直接进行平均去除球差即为重力波前误差。因此,旋转测试获取的各项泽尼克系数取算术平均去除球差即为重力波前误差,结果为:像散项Z5=0.021 9λ、Z6=-0.021 5λ,彗差项Z7=-0.029 2λ、Z8=0.079 2λ,其中次镜的重力变形只对彗差有影响,对像散没有影响。通过光学系统模型可以计算次镜位移量对应的彗差泽尼克系数,通过计算重力波前误差对应次镜组件的重力变形为:垂直方向位移6.4μm,水平方向位移2.0μm(该位移也可根据表1利用彗差与均方根误差的关系推算)。测试结果显示垂直方向次镜的位移为6.4μm,与仿真结果5.9μm非常接近,相互印证。
像散方面由于未完成最终装调,镜头部分螺钉未锁紧,导致旋转过程主镜面形变化,各个测试方向像散值有所波动,但多个方向平均后显示的重力波前误差中的像散值较小,说明多方向平均可以很好的消除误差,从侧面说明了方法的有效性。
经过水平旋转测试,次镜组件重力变形情况与结构仿真结果非常接近,后续装调过程中使用了卸载装置补偿重力变形进行装调和测试。镜头装调完成后在垂直检测塔内进行了竖直检测,以再次验证镜头的零重力像质。测试时镜头主体竖直向上,在垂直检测塔顶部安装竖直平面镜,镜头焦面处安装干涉仪形成自准直光路进行检测。垂直测试结果如图 6所示。垂直测试各项泽尼克系数为:像散项 Z5=-0.040λ、Z6=-0.031λ,彗差项 Z7=-0.038λ、Z8=0.061λ,球差项Z9=-0.089λ。与水平旋转各方向测试结果相比,镜头装调完成后像散显著减小,残余慧差相对较小。通过光学仿真确认在重力方向次镜位置误差为 4.9μm,小于重力变形的量级(6μm),满足次镜平移公差要求(5μm)。垂直测试表明,镜头波前误差处于较低水平,系统成像理想。说明光轴水平旋转测试结果以及后续的卸载补偿措施实施有效,此时的波前即可作为系统的零重力波前,预测系统在轨的成像品质。
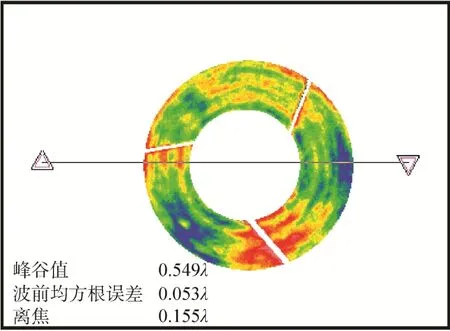
图6 系统光轴垂直测试结果Fig.6 Result of optical system vertical test
6 结束语
根据镜头公差分析结果以及结构力学仿真结果确定了次镜组件受重力变形对系统像质可能有较大影响,需要使用零重力像质检测技术确定重力造成镜头重力波前误差的实际大小,保证镜头的在轨成像品质。随后,本文研究了零重力像质检测的方法,综合应用水平旋转测试和垂直测试的方法进行了镜头零重力像质检测工作。旋转测试的结果表明力学仿真分析结果准确,垂直检测说明次镜实际位移满足公差要求;垂直测试结果与旋转测试结果相互印证,表明镜头的零重力像质良好,满足公差要求。
References)
[1] MCCOMAS B, RIFELLI R, BARTO A, et al. Optical Verification of the James Webb Space Telescope[C]//CULLUM M J, ANGELIi G Z. Proceedings of SPIE Volume 6271, Modeling, Systems Engineering, and Project Management for Astronomy II. SPIE, 2006, 62710A: 1-12.
[2] 陈世平. 空间相机设计与试验[M]. 北京: 宇航出版社, 2003.
CHEN Shiping. Design and Test for Space Camera[M]. Beijing: China Astronautics Publishing house, 2003. (in Chinese)
[3] 姜海滨, 罗世魁, 曹东晶, 等. “高分二号”卫星轻小型高分辨率相机技术[J]. 航天返回与遥感, 2015, 36(4): 25-33.
JIANG Haibin, LUO Shikui, CAO Dongjing, et al. Technology of High-density and High-resolution Camera of GF-2 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2015, 36(4): 23-33. (in Chinese)
[4] 杨秉新. 国外航天侦察相机和测绘相机发展概况[J]. 航天返回与遥感, 1998, 19(2): 47-52.
YANG Bingxin. The Development Survey of Foreign Space Reconnaissance Camera and Mapping Camera[J]. Spacecraft Recovery & Remote Sensing, 1998, 19(2): 47-52. (in Chinese)
[5] ZINN J W, JONES G W. Kepler Primary Mirror Assembly FEA Surface Figure Analyses and Comparison to
Metrology[C]//BURGE J H, FAEHNLE O W, WILLIAMSON R. Proceedings of SPIE Volume 6671, Optical Manufacturing and Testing VII. SPIE, 2007, 667105: 1-11.
[6] 范斌, 蔡伟军, 张孝弘, 等. “资源三号”卫星多光谱相机技术[J]. 航天返回与遥感, 2012, 33(3): 75-84.
FAN Bin, CAI Weijun, ZHANG Xiaohong, et al. Technology of the Multi-spectral Camera of ZY-3 Satellite[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(3): 75-84. (in Chinese)
[7] CLAMPIN M. Status of the James Webb Space Telescope[C]//OSCHMANN J M, DE GRAAUW M W, MACEWEN H A. Proceedings of SPIE Volume 7010, Space Telescopes and Instrumentation 2008: Optical, Infrared, and Millimeter. SPIE, 2008, 70100L: 1-7.
[8] CASTEL D, SEIN E, NAKAGAWA T. The 3.2m all SiC Telescope for SPICA[C]//NAVARRO R, CUNNINGHAM C R, PRIETO E. Proceedings of SPIE Volume 8450, Modern Technologies in Space- and Ground-based Telescopes and Instrumentation II. Amsterdam(NL): SPIE, 2012, 84502P: 1-13.
[9] SABELHAUS P A, CAMPBELL D, CLAMPIN M, et al. An Overview of the James Webb Space Telescope (JWST) Project[C]. UV/Optical/IR Space Telescopes: Innovative Technologies and Concepts II. San Diego, CA: SPIE, 2005.
[10] BARTO A A, ATKINSON C, CONTRERAS J. Optical Performance Verification of the James Webb Space Telescope[C]. Conference on Space Telescopes and Instrumentation. Marseille, France: SPIE, 2008.
[11] 韩娟, 段嘉友, 张钧. 大口径非球面主反射镜的装调方法研究[J]. 应用光学, 2012, 33(3): 490-495.
HAN Juan, DUAN Jiayou, ZHANG Jun. Alignment Method for Large Aperture Aspheric Mirror[J]. Journal of Applied Optics, 2012, 33(3): 490-495.
[12] SUBRAHMANYAM D, KURIAKOSE S A, KUMAR P, et al. Design and Development of the Cartosat Payload for IRS P5 Mission[C]//SMITH W L, LARAR A M, AOKI T, et al. Multispectral, Hyperspectral, and Ultraspectral Remote Sensing Technology, Techniques, and Applications. Goa, India: SPIE, 2006, 6405: 1-7.
[13] IWATA T, ISHIDA H, OSAWA Y, et al. Advanced Land Observing Satellite (ALOS): Development and On-orbitStatus[J]. Journal of Space Technology and Science, 2007, 23(1): 1-13.
[14] CABEZA I, PRADIER A. Dimensional Stability Verification of an Optical Bench for Space Applications under Thermal Vacuum Environment[C]. Spacecraft Structures, Materials and Mechanical Engineering. Noordwijk: ESA, CNES and DARA, 1996.
[15] LAMARD J L, FRECON L, BAILLY B, et al. The High Resolution Optical Instruments for the Pleiades HR Earth Observation Satellites[C]. 59th International Astronautical Congress. Glasgow, United Kingdom: International Astronautical Federation, 2008.
[16] 孙敬伟, 陈涛, 王建立, 等. 主次镜系统的计算机辅助装调[J]. 光学精密工程, 2010, 18(10): 2156-2163.
SUN Jingwei, CHEN Tao, WANG Jianli, et al. Computer-aided Alignment for Primary and Secondary Mirrors[J]. Optics and Precision Engineering, 2010, 18(10): 2156-2163. (in Chinese)
[17] 韩娟, 段嘉友, 陈建军, 等. 大口径望远系统中主次镜系统的装调方法[J]. 中国激光, 2012(7): 231-236.
HAN Juan, DUAN Jiayou, CHEN Jianjun, et al. An Alignment of Primary and Secondary Mirrors for Optical System in Large Telescopic[J]. Chinese Journal of Lasers, 2012(7): 231-236. (in Chinese)
[18] 张向明, 姜峰, 孔龙阳, 等. 卡塞格林系统光学装调技术研究[J]. 应用光学, 2015, 36(4): 526-530.
ZHANG Xiangming, JIANG Feng, KONG Longyang, et al. Research on Optical Alignment Technology for Cassegrain System[J]. Journal of Applied Optics, 2015, 36(4): 526-530. (in Chinese)
Image Quality Checkout Technique for Optical Camera of GF-4 Satellite
WANG Yun LI Ling GU Zhenyu WANG Yue LIAN Minlong
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
Large remote sensing camera has larger gravity deformation because of its lower structure strength. Gravity displacement of large optics cannot be ignored for space mission. Zero-Gravity wave front test is needed for large space camera when aligned and tested on ground, in order to ensure camera imaging quality when gravity is removed on orbit. The gravity displacement of optical camera for GF-4 is analyzed including optical simulation to determine sensitive components, and mechanical simulation is made to get displacement amount. Rotation testing and vertical testing are made to verify Zero-Gravity wave front in alignment procedure, the results of both testings indicate displacement caused by gravity is the same as that in mechanical simulation.
Zero-Gravity; remote sensing lens; optical test; camera alignment; GF-4 satellite
O439
: A
: 1009-8518(2016)04-0080-07
10.3969/j.issn.1009-8518.2016.04.011
王昀,男,1981年生,2005年获南京理工大学光学工程专业硕士学位,高级工程师。研究方向为光学测试与装调。E-mail: 13366359922@163.com。
(编辑:夏淑密)
2016-03-28
国家重大科技专项工程
