飞机螺旋运动测量技术的发展
2016-02-21YANWei
颜 巍 / YAN Wei
(上海飞机设计研究院,上海201210)
飞机螺旋运动测量技术的发展
颜 巍 / YAN Wei
(上海飞机设计研究院,上海201210)
立式风洞是研究飞机尾旋与尾旋改出的特种设施。由于尾旋试验模型的大小受限于风洞的试验段尺寸和流场的边界条件,较难在模型内部安装测量系统,早期均采用外部系统对处于螺旋运动状态的飞机模型姿态进行捕捉、辨识,进而分析飞机的尾旋特性与改出特性。随着材料科学、智能加工技术和信号传输技术的发展进步,测量系统向模块化、微型化和超微型化发展,使得测量机构能够安置于飞机模型的内部,这样不仅可以实时测量数据并记录,不需要到试验后才进行判读和辨识,而且所测量的数据更加完整。
人工判读测量系统;全视场尾旋测量系统;航向参考系统
0 引言
飞机在飞行过程中若全机迎角超过临界迎角,则飞机自身会发生复杂的旋转运动,即螺旋运动。这种复杂运动的实质是一种极不稳定的、高度非线性的六自由度运动,即飞机沿自身三个轴向进行直线运动的同时,还围绕三个轴发生自转运动,飞机沿着小半径的螺旋形轨迹下落,就像芭蕾舞演员那样踮起脚尖旋转。在螺旋运动中的飞机部分失去操纵性,有时甚至完全失去操纵性,飞行员很难判别飞机的姿态,旋转的方向,甚至飞行的高度,如果不能立刻迫使飞机迎角回到亚临界迎角范围,则飞机无法从螺旋运动中改出。为了研究飞机的螺旋运动和螺旋的改出,科研人员采用了一系列的方式与方法,如CFD计算、大气模型自由飞试验和立式风洞试验等。立式风洞是研究飞机螺旋运动和螺旋改出的设施。目前世界上立式风洞的形式主要有三种:直流式(日本防衛省技術研究本部第3研究所Φ4m立式风洞)、单回流式(俄罗斯ЦАГИ的T-105 Φ4.5m立式风洞)、双回流式(美国NASA Langley Φ20ft VST)。将满足几何相似与动力相似的飞机模型投入到立式风洞试验段内,使得模型在上升气流中自由地进入螺旋运动,调节试验段气流速度,保证飞机模型在作螺旋运动时处于悬浮状态。在研究改出螺旋时,使用专门的自动驾驶仪控制模型上的可偏转舵面来迫使飞机改出螺旋运动。
与模型静态测力试验测量气动力不同,立式风洞试验为全动态试验,可测量的参数均为角度和运动参数。受立式风洞试验段口径和流场边界的限制,螺旋试验模型一般较小,翼展在1m~1.4m。受质量和惯量的限制,模型需要足够轻,这样较难在模型内部安装测量仪器,尤其是在早期机械式陀螺仪又大又笨重的情况下,模型在螺旋运动中各参数随时间变化规律的测量不得不依赖外部系统。随着技术的发展,特别是微型陀螺仪等仪器的投入使用,使得飞机模型螺旋运动参数的测量更加精确,数据更完善。
1 立式风洞模型运动的测量系统
1.1 人工判读测量系统
此法很古老,俄罗斯中央流体力学研究院T-105立式风洞和美国NASA兰利立式风洞在二十世纪三、四十年代的飞机模型尾旋试验研究中使用这种测量方法。苏联解体后,中国科研人员从俄罗斯中央流体力学研究院T-105立式风洞处学习并获得此套系统的技术和设备。其测量过程是采用高速胶片摄像机将立式风洞中飞机模型的运动过程拍摄下来,图1 a)展示了兰利立式风洞高速胶片摄像机拍摄时的立体示意图。试验中采用了两个高速摄像机,一个在风洞上部洞壁的侧面,一个在风洞底部圆心位置,尾旋试验过程中用64帧/秒的高速胶片摄影机记录下模型的运动姿态。图1 b)展示了兰利立式风洞飞机模型尾旋试验时从侧面所拍摄的飞机模型运动的连续画面。获得胶片后进行冲洗,然后用专用的投影放映机将一张张胶片上的图像投影到一个屏幕上,采用人工手动的方法与专用的解码模型投影进行比对,即在投影前放置一个与试验模型完全等比例缩小的对比模型,直至模型姿态与胶片中的投影完全一致,读出此时缩小模型的空间姿态(俯仰角、滚转角)记为对应时刻的运动模型空间姿态,通过这样一种解码判读方式获得试验模型的运动姿态。图1 c)展示了T-105立式风洞的尾旋试验模型与解码模型对比。此种测量方式简单直观,因为有人工参与的过程,对图像质量要求较低,对光噪声干扰要求低。但这种方法也存在先天的不足,主要有以下几点:1) 数据判读时间极长,一次试验的判读时间就要一周左右;2) 模型制作成本高;3) 模型姿态的判读受人为因素影响,不可避免地会引入人为误差;4) 数据不足,一般选择较为关注的时间段,选择一定的时间间隔进行判读,所以人工判读获得的数据量小,间隔大,数据不足。时至今日,此种测量方法在NASA兰利立式风洞中已被摒弃,而T-105立式风洞仍然采用此种方法,虽然经过几次改进,但其基本方法没有大的改变。

图1 立式风洞高速胶片摄像机系统、拍摄结果与解码模型
1.2 全视场尾旋测量系统
由于人工判读方法的弊端,科研人员开发了全视场尾旋测量系统[1],该系统采用基于图像采集与处理的双目图像测量技术,其基本原理是基于光学中心的面投影方程。所有内部方位参数和外部方位参数通过相机校准而确定,这些参数确定后,目标在2D图像平面的坐标和3D物理空间的坐标的关系得以确定。系统采用4台摄像机,分成A、B两组,每组2台形成双目立体视觉,如图2 a)所示。任一目标点在一组摄像机成像后,可解出目标的空间坐标,再根据其解算模型的各种运动参数。系统应用计算机并口进行图像采集控制,用脉宽调制接口进行舵面偏转控制,可以实现模型舵面控制、图像采集的同步记录,测量系统的结构示意如图2 b)所示。

图2 全视场尾旋测量系统
要获得模型尾旋时的各种运动参数及姿态参数,最理想化的方法是通过获得模型中心点及模型X、Y、Z 轴上各一点在每一时刻的坐标(风轴),即可获得模型尾旋时的各种运动参数及姿态参数。但是,由于尾旋试验要求非接触测量及模型三维自由运动等的特殊性,直接获得这些参数很难。所以需要通过在机身上打上不同的标记,标记点一般为白色,如图3 a)所示。为了保证图像的高对比度,在打标记点之前,需要在模型表面喷上亚光漆,如图3 b)所示,通过CCD相机来识别飞机在某一时刻的空间相对位置和飞机的姿态。当能正确确定标记点的空间实测坐标以后,用一组能够描述飞机姿态的标记点就能够正确判读运动中的飞机姿态。一般来说,可以对飞机姿态进行判定的标记点组合主要有四种,如图4所示,这四种组合基本囊括了实测过程中所有飞机可能出现的姿态。
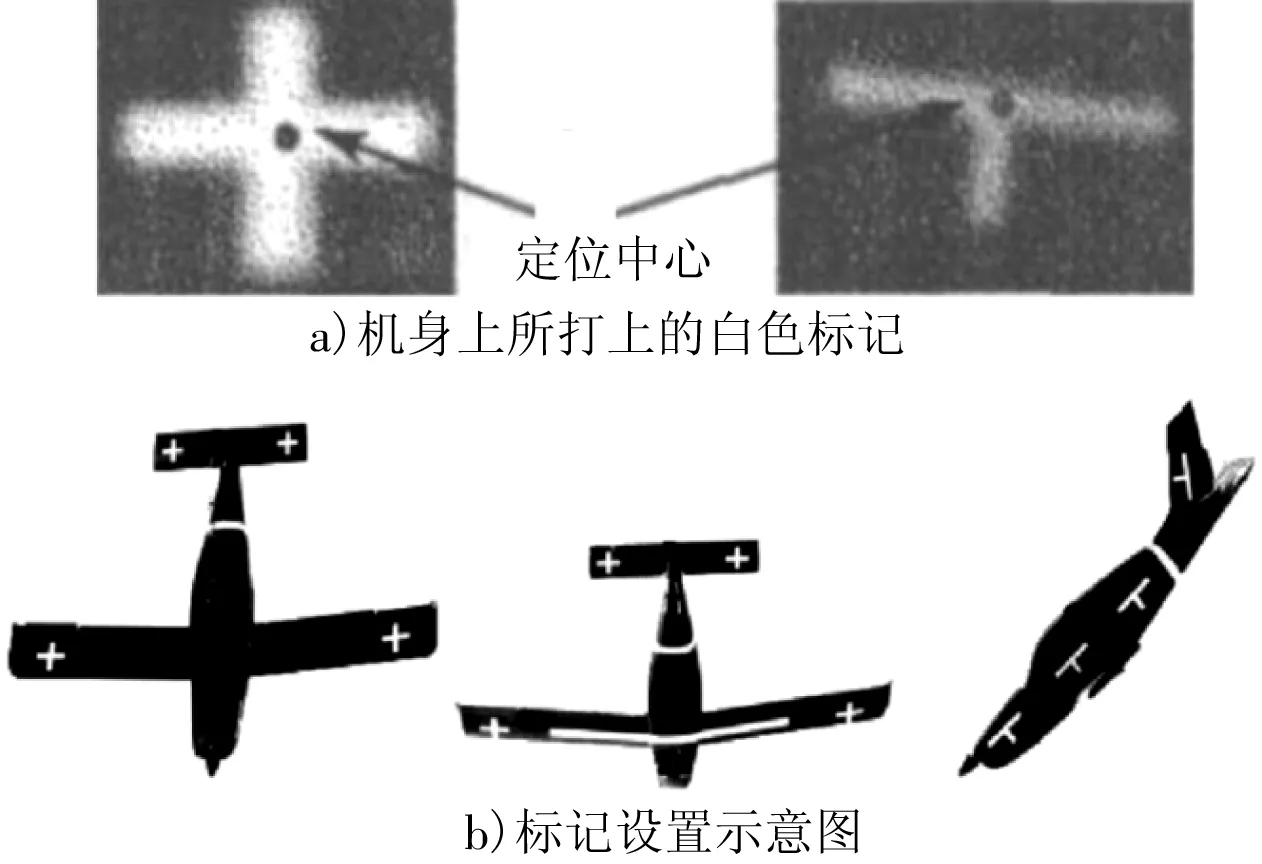
图3 “十”字和“T”字标记点示意图

图4 标记点组合判定模型姿态示意图
为了准确判读飞机在空间的位置和姿态,还需要对立式风洞试验段的空间固定坐标进行准确标定和校核,目的是为了建立风洞洞体坐标系与飞机机体坐标系的关系,这就需要标定图像板,图5展示了标定图像板以及空间坐标标定的过程示意。在完成了以上工作后,即图像识别系统设置、模型标定、空间标定以及风速标定和计算模块设置,就可以获得飞机模型姿态、旋转角速度等信息[2]。

图5 空间位置标定图像板
随着立式风洞型号试验经验的累积,“十”字形和“T”字形标定越来越显示出一些不利的地方,首先这种标定方式比较耗费时间和精力,灵活性较差。有时“十”字形标记和“T”字形标记不易区分,对图像点进行匹配的时候很难做到自动匹配。因此立式风洞尾旋试验的研发人员开发了一种新的标记方式,称为编码标记点,如图6 a)、b)所示,将大圆环的外圈分成面积相等的8份,中心圆为定位圆,对每一个外环颜色区标记为1,黑色区标记为0,这样就构成了一个8位二进制数,将二进制换算到十进制,上图中最小二进制为00100101,换算到十进制则编号为37。将不同的编码标记点按照一定的规则粘贴在飞机模型的不同部位,如图6 c)所示。试验中首先需要对编码标记进行定位和解码,流程为:读入图像→图像预处理→检测圆心→编码标记点解码,飞机模型上的每一个编码点都有唯一的一个编码值,相对于“十”字形和“T”字形标定,这种方法可以有很多种不同的编码,标记点有更高的灵活度。

图6 8位编码标记示意图

图7 标定板检测与模型表面编码点检测
试验中,首先用尺寸大小为0.6m×0.8m,包含有99个圆的标定板进行标定,根据相机的视场范围将标定板放置7~35个不同位置,利用双目摄像机对标定板中的每一个圆的圆心进行定位,如图7 a)和b)所示,其实质是建立了双目摄像机所拍摄的空间三维系统与风洞洞体坐标系的关系。此外,还需要用三维坐标测量仪精确测量各标志点中心在机体坐标系中的三维坐标。然后开启风洞,将打上编码点的飞机模型送入立式风洞,当模型在旋转运动时,通过双目摄像机对飞机的运动进行图像采集,结束后对图片中模型表面的标记点进行定位,如图7 c)和d)所示,将机体体轴系下机体表面的编码点坐标转换到风洞洞体坐标系下的坐标,即建立了风洞洞体坐标系下三维特征点坐标与飞机模型机体坐标系下三维特征点坐标的一个稳定转换关系,这样通过两种坐标系的转换关系就可以较为准确地求得飞机模型的俯仰角、滚转角和偏航角[3]。
1.3 微型姿态航向参考系统

图8 MEMS传感器及工作原理示意图
全视场尾旋测量系统在输出数据和处理数据上比人工判读测量系统在效率上要高出很多,但在试验前需要花费大量时间进行空间位置定位和模型标记点定位。随着科技的进步,传统、粗笨的机械式陀螺仪逐渐被微型机电式(MEMS)陀螺仪所取代,这种微型陀螺仪体积小、质量轻、信号可无线传输,可以将其放置于飞机尾旋模型内部,在满足质量和惯量的前提下,尽可能地使微型陀螺仪的质心与飞机模型的质心重合,若空间限制远离模型质心时,应考虑将试验结果换算至质心。目前一些立式风洞试验模型所使用的微型陀螺仪是荷兰XSENS公司生产的MTI-28A53G25型姿态航向参考系统[4],其外形和工作模式如图8所示,系统内部主要包括三轴加速度计、三轴陀螺仪、三轴磁强计和温度传感器,这些组成了姿态的感知部分,此外还有16位AD、内部DSP和非易失性存储器、电源模块和接口收发器等组件。当飞机模型在立式风洞试验段做螺旋运动时,微型测量系统开始工作,通过三轴加速度计、三轴陀螺仪、三轴磁强计测量出飞机姿态的数据,经过AD转换后获得原始数据,该数据可以直接输出,也可以用于系统内部物理传感器,进而获得准确的传感器数据[5]。
三轴加速度计可以同时测量x、y、z三个方向上的加速度值。MTI微型姿态航向参考系统所采用的加速度传感器为硅微三轴加速度传感器。市场上所出售的MEMS传感器包含有几种基于不同原理的硅微三轴加速度传感器,如电容式、压阻式、热电偶式、谐振式、光波导式和隧道式,其中电容式最为常见[6]。
三轴陀螺仪可以同时测量绕x、y、z三个轴的旋转角速度。MTI微型姿态航向参考系统所采用的陀螺仪为振动式微陀螺仪,它利用科里奥利效应测量运动物体的角速度,即当一个物体沿着一个方向运动且施加角一个旋转率时,则该物体收到一个垂直方向的力,从电容感应结构可以测到科里奥利效应所产生的位移。MEMS陀螺仪有两个方向的可移动电容板,当微型陀螺仪随着飞机模型做螺旋运动时,径向电容板加震荡电压迫使物体作径向运动,横向的电容板测量由于横向科里奥利运动带来的电容变化,科里奥利力与角速度成正比,所以电容的改变可以计算出角速度[7]。
三轴磁强计测得的数据用来校准由陀螺的数据计算而产生的偏航角。温度传感器测得的温度数据用来在计算航向时所需要的温度补偿。
传感器信息采用无线数据传输模式,数据格式为RS232格式,避免因数据线引入额外的悬挂绳干扰问题。试验前,通过对微型姿态航向参考系统进行编程开发,将其输出速率与光学测量系统同频,实现光学测量信息与微型姿态航向参考系统信息的同步记录。
2 结论
本文简要回顾了立式风洞尾旋试验测量技术的发展历史,从较为古老的人工判读测量系统,发展为全视场尾旋测量系统,再到包含微型陀螺仪的微型姿态航向参考系统。为需要进行立式风洞尾旋试验研究的飞机型号提供了参考。
[1] 蒋敏.立式风洞尾旋测量系统研制[D].长沙:国防科技大学,2006.
[2] 张德久.立式风洞尾旋运动姿态参数计算机视觉测量系统的研制[D].长沙:国防科技大学,2007.
[3] 李沛,等.一种基于双目视觉原理的飞机尾旋运动姿态测量方法[J].国防科技大学学报,2008,30(2):111-115.
[4] 乔熠晖.MTI惯性测量单元及其测试平台的研究[D].太原:中北大学,2012.
[5] 黄会明,等.飞机尾旋三维测量试验的改进方法[J].实验流体力学,2013,27(2):77-81.
[6] 张海涛,等.MEMS加速度传感器的原理及分析[J].电子工艺技术,2003,24(6):260-262.
[7] MEMS传感器的原理和应用[Z].哈尔滨工业大学,2012.
Development of Measurement Technique for Aircraft Spin Motion
(Shanghai Aircraft Design and Research Institute, Shanghai 201210, China)
Spin tunnel is a specific facility to investigate aircraft spin and spin recovery. Since the size of aircraft spin model is limited by cross section of test section and flow field boundary condition, it is difficult to set the measurement system inside model. In earlier time, the attitude of spin model was captured and identified by the external system to analyze further aircraft spin characteristics and recovery characteristics. With the development of materials science, intelligent processing technology and signal transmission technology, measurement system is modularized, miniaturized and ultra microminiaturized, and it can be set inside the aircraft spin model. Thus, data can be taken during the tests, interpretation and identification can be carried out simultaneously, furthermore, the measured data is more complete.
manual interpretation measurement system; full field measurement system; navigation reference system
10.19416/j.cnki.1674-9804.2016.04.001
V212
A
