双控制河段船舶通行指挥系统设计与实现
2016-02-16吴关胜
吴关胜
(长江泸州航道局,泸州646000)
双控制河段船舶通行指挥系统设计与实现
吴关胜
(长江泸州航道局,泸州646000)
针对双控制河段缺乏有效船舶通行指挥方法的现状,在考虑工程实际因素的基础上,应用网络、通信、计算机、人工智能等理论和技术手段,设计了一种基于智能控制算法的双控制河段船舶通行指挥系统。该系统以船载自动识别系统(automatic identification system,AIS)作为主要信息源,采用改进卡尔曼滤波方法实现对船舶位置的实时跟踪预测,以船舶到达和通过控制河段的行程时间为依据,并结合船舶操纵特性,制定了一套船舶安全通行排序规则和指挥方法。泸州永川航段双控制河段的实地应用结果表明,文章提出的双控制河段船舶通行指挥系统可行性较好,能够降低信号员工作强度,并能提高控制河段通航服务水平和通行指挥效率。
控制河段;电子航道图;航迹预测;通行排序;卡尔曼滤波
在长江上游河段,部分航道仍处于天然河道状态,航道弯曲狭窄、滩多水急,航行条件不良,轮船只能单向通过,需设置控制信号台指挥船舶通行,从而保障通航安全。随着长江数字航道建设的推进,在部分单控制河段已实现智能指挥和自动揭示,这提高了控制河段信号台通行指挥效率和水平,增强了控制河段的主动监控能力[1-6]。然而,目前控制河段智能指挥系统只能解决单一控制航段的船舶交通管理问题[7-8]。当两个或两个以上控制河段相距很近且在同水位期时,则需要联合控制这些控制河段,以保证航道总体通航效率最大化、安全最优化。由于船舶吨位和船舶通航密度的增大,传统的人工指挥模式在双控制河段的通行指挥难度越来越大,影响了航道通航效率和船舶航行安全。
1系统功能分析
双控制河段船舶通行指挥系统旨在通过实现交通指挥和船舶通行控制的自动化来降低信号员的劳动强度。为实现这一目标,该系统应当具有如下功能:
(1)船舶交通流感知。采集控制河段的船舶到达和通行情况,预测船舶到达、通过控制河段的时间。(2)制定船舶最优通行顺序。采用智能算法,根据双控制河段船舶到达情况和通行约束条件,制定船舶通行规则。(3)船舶通行信号揭示。根据制定的船舶通行规则,联动控制各个信号控制台,准确揭示信号旗并将通行信号推送到电子航道图。(4)船舶通行状态远程动态监控。通过各类船舶感知工具,实时捕捉船舶运行动态,并经由传输网络远程监视船舶执行通行规则的情况。(5)统计分析。自动保存通行信号揭示和船舶通行情况,作为系统运行反馈和评估的依据。
2系统架构设计
双控制河段船舶通行指挥系统通过各类传感器感知水域内船舶交通流信息,然后通过智能算法评估船舶交通运行态势,分析最优的船舶通行方法,最后将通行指令发送给船舶端和电子航道图服务系统。系统可分为信息采集层、控制决策层和执行层(图1)。
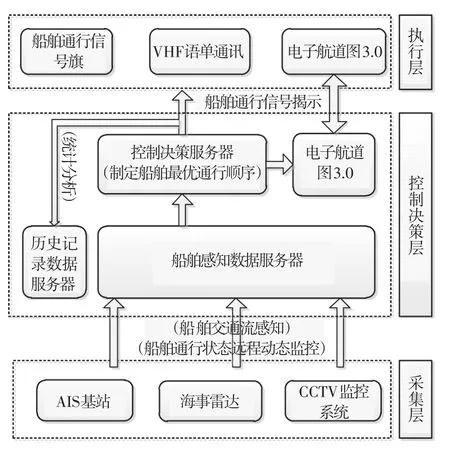
图1 双控制河段船舶通行指挥系统架构Fig.1 Structure of ship traffic control system in double control waterway
(1)信息采集层。信息采集层通常包括AIS基站、海事雷达、CCTV监控系统,有时还会包括无线射频识别系统(RFID)和GPS。信息采集层全面感知控制河段内的交通环境和船舶交通状态,并将状态数据实时存储到数据库服务器。
(2)控制决策层。控制决策层根据信息采集层获取的航道环境和船舶交通数据,采用优化的人工智能控制算法,自动计算最优船舶交通控制方案,并提供人机交互接口,便于及时对控制方案进行监视与调控。控制决策层主要包括控制决策服务器、电子航道图3.0和数据库服务器和历史记录数据服务器。
(3)执行层。执行层将控制河段信号指挥系统的控制决策真正应用于真实船舶管理环境,具体是通过电子航道图3.0、信号旗控制装置和VHF通讯系统来实现。其中,信号旗控制系统是控制河段信号指挥系统的最终输出,即通过信号旗揭示通行方案。VHF通信系统实现了船方和控制人员之间的语音通信,信号员可以通过VHF将船舶应该执行的动作传达给船方,或者咨询船方的行为动态。
3双控制河段通行指挥策略
双控制河段由稳船区、第一控制河段、过渡区、第二控制河段、调头区5个区域组成。调头区可供下行船舶掉头,稳船区和过渡区允许上行船舶稳船,其中过渡区的稳船数量需限定在一定范围,第一、二控制河段区域同一时间只允许船舶单向通过控制河段。
由于下行船舶的航速快,不易掉头,所以当同时有上下行船舶到达控制河段指挥断面时,上行船舶应当让下行船舶先通行,尽量避免下行船舶掉头。双控制河段通行指挥原则主要包括以下4点:
(1)下行船舶还没有到达调头区,此时上行船舶已经到达第二控制河段或者已经在过渡区等待,应当让上行船舶先通过第二控制河段。
(2)下行船舶到达调头区时,上行船舶也到达第二控制河段,应当让下行船舶先通行,让上行船舶在第二控制河段外等待。如果下行船舶还没有到达调头区,而上行船舶已经到达稳船区,应当让上行船舶先通过第一控制河段。
(3)下行船舶到达调头区时,上行船舶也到达稳船区,应当让下行船舶先通行,让上行船舶在第一控制河段外等待。
(4)当控制河段有上行船舶通行时,同时下行船舶到达了调头区,对于还没有进入第二控制河段或者第一控制河段的上行船舶应该在第二控制河段或第一控制河段外等待,当已指挥的上行船舶通过后,让下行船舶先通行。
明确双控制河段船舶通行基本规则之后,则可以依据船舶AIS信息预测上下水船舶到达相应界限标的时间,对船舶的通行顺序进行动态排序。图2给出了双控制河段船舶通行指挥算法的信息处理流程。当收到船舶AIS信息时,根据船舶的动静态信息计算船舶的航行方向(上行或下行)、到各个标志的距离(到各界限标鸣笛标距离)、到各个标志的时间(到各界限标鸣笛标时间、通过控制河段时间)、船舶的区域位置(上游、调头区、第二控制河段内、过渡区、第一控制河段内、稳船区、下游),为指挥算法提供数据支持。
首先,第一、第二控制河段分别根据船舶的预计到达时间、预计通过控制河段时间长短进行排序,时间越短表示船舶会先通过控制河段,应该排在前面,这样就得到两个控制河段的初次通行队列。其次,系统根据相邻控制河段的船舶通行情况对这两个通行顺序进行协同及调整,得到最终的通行队列。最后,当船舶到达指挥断面时,指挥算法给出预警信号让船舶松车等待或者给出相应的通行信号指挥船舶通行。
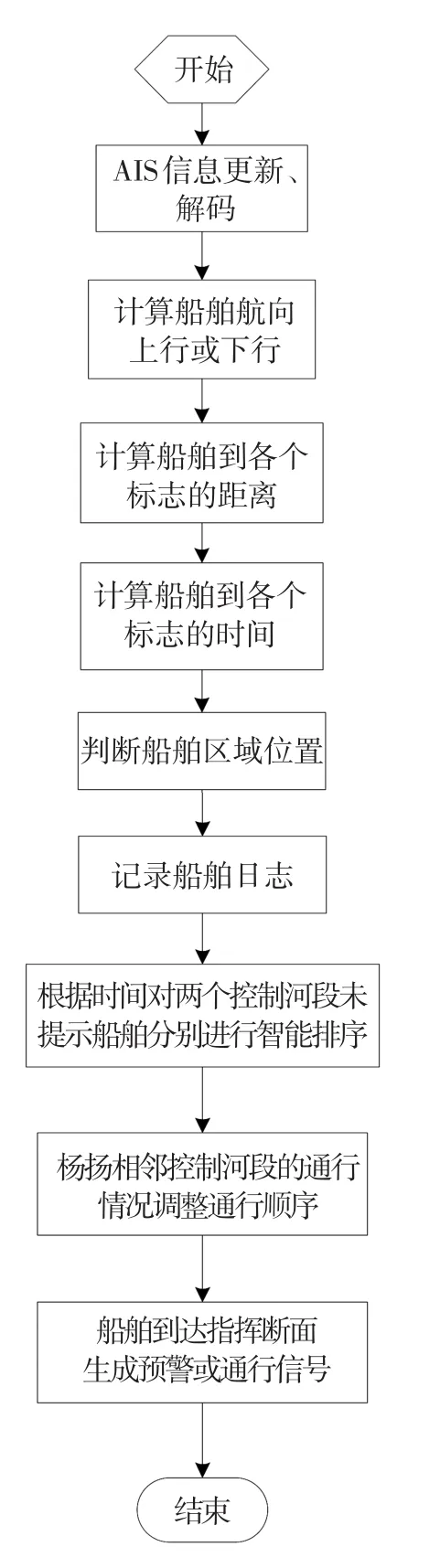
图2 指挥算法处理流程Fig.2 Processing flow chart of command algorithm
4系统应用
长江泸州航道局永川航道处所辖长江航道庙角碛控制河段(斗笠子预告台、控制台)和白脸石控制河段(东溪口指挥台和朱沱控制台)在3 m以下水位时形成双控制河段。本研究以此河段为例,开展双控制河段通行指挥系统的实现与应用研究。
4.1系统组成
庙角碛双控制河段通行指挥系统主要由主控端、被控端、监控端等三部分组成。其中,主控端由控制河段智能通行指挥系统软件和信号揭示及控制系统组成,用于船舶通行状况监控、通行指挥和信号揭示,部署于指挥台;被控端由控制河段智能通行指挥系统软件和信号揭示及控制系统组成,用于接收主控端所发布的通行指挥信号并予以揭示,部署于控制台;监控端由控制河段智能通行指挥系统软件实现,用于接收主控端所发布的通行指挥信号、远程查看任意控制河段内已安装AIS设备船舶的船位以及当前信号台的通行信号。
系统主要包括双控制河段船舶通行指挥系统、长江电子航道图3.0系统远程数据中心、远程控制中心(只保留接口)。其中双控制河段船舶通行指挥系统分为3个子系统,即双控制河段船舶通行指挥子系统(主控端)、双控制河段船舶通行指挥子系统(被控端1)和双控制河段船舶通行指挥子系统(被控端2),它们分别安装在东溪口、斗笠子和朱沱信号台。由于每个信号台职责不同,因此每个系统功能也不同,有必要根据每个信号台通行情况自动生成和揭示通行信号。不同信号台具体的功能要求为:东溪口信号台和斗笠子信号台需要同时揭示下水信号,分别揭示上水信号和下水信号;朱沱信号台与东溪口信号台信号需时刻保持一致。3个子系统通过网络实现数据的协同与共享。
东溪口指挥台部署双控制河段船舶通行指挥子系统(主控端),该系统采用C/S开发模式。该信号台主要负责信号采集,船舶动态监控,通行指挥,将相关信息实时发送到被控端,信号揭示,通行日志记录。
斗笠子控制台、预告台部署双控制河段船舶通行指挥子系统(被控端1),该系统采用C/S开发模式。该信号台主要负责信号采集与发送,接收主控端发布的通行信号并揭示,船舶动态监控,通行日志记录。
朱沱控制台部署双控制河段船舶通行指挥子系统(被控端2),该系统采用C/S开发模式。该信号台主要用于接收双控制河段船舶通行指挥系统(主控端)发布的通行信号并揭示,船舶动态监控,朱沱控制台能够直接使用与斗笠子控制台所采用的指挥系统,其与斗笠子控制台被控端的区别在于朱沱控制台所揭示的通行指挥信号与东溪口指挥信号一致,斗笠子控制台所揭示的信号为斗笠子控制河段的指挥信号。
4.2应用效果
通过实地部署应用,本文提出的双控制河段船舶通行指挥系统实现了船舶交通流感知,信号自动生成与揭示,船舶信息的实时动态监控,以及通行信息、指挥记录等信息的自动记录与管理等功能。控制河段智能通行指挥系统(主控端)具有AIS信号采集、船舶通行信号指挥和“三种”模式信号揭示的功能,并将相关信息实时发送到被控端和远程监控端。
控制河段智能通行指挥子系统(被控端)可以接收并显示主控端发送过来的实时信号,并控制实体揭示装置的运行。监控端可用于监视控制河段的通行指挥状况,并查询通行指挥历史信息。
该系统实现的重要功能描述如下:(1)实现了主控端和被控端信号的智能同步揭示。利用AIS、控制河段通行指挥规则及人工指挥经验构建了智能控制网络专家系统,并融合了电子航道图系统、AIS及网络数据储存等基础技术,成功实现了主控端和被控端信号的智能同步揭示的功能。(2)实现了信号台对船舶的“点对点”信号揭示和主动指挥能力。系统通过为长江电子航道图提供控制河段通航实时信息和船舶通行顺序队列,使船载电子航道图导航系统能够显示控制河段通行信号、通行指挥信息和本船通行指令等信息,从而实现“点对点”的通行信号推送和指挥,使过往船舶能更合理地安排其通过控制河段的计划,减少等候时间。(3)构建了控制河段通行动态远程监控客户端。远程用户通过动态远程监控客户端可以访问控制河段智能通行服务器,能够实时获取控制河段船舶的动静态信息以及东溪口、斗笠子信息台信号揭示的状况,为实时了解和掌握辖区内所有控制河段船舶航行与指挥情况奠定了技术基础。
5结论
本文探讨了双控制河段船舶通行指挥系统的功能、系统架构、通航指挥方法等,并在长江航道上游泸州永川段展开应用。通过实际运用部署,本文建立的双控制河段船舶通行指挥系统显著降低了信号员的劳动负荷,提高了双控制河段船舶通行效率。
[1]毕慧博.神背嘴信号台智能辅助指挥系统设计与实现[D].重庆:重庆大学,2012.
[2]李良雄.基于AIS的控制河段智能通行指挥系统的设计及实现[J].水运工程,2014(11):39-43. LI L X.Design and implementation of intelligent command system for controlled waterway based on AIS[J].Port&Waterway En⁃gineering,2014(11):39-43.
[3]毕方全.信号台信号自动揭示与船舶通行智能辅助指挥系统技术研究[J].科技传播,2011(13):225-226.
[4]靳智,梁山,曹芳平.基于自动识别系统的长江控制河段船舶视觉伺服跟踪方法[J].计算机应用,2011,31(12):3 414-3 417,3 421. JIN Z,LIANG S,CAO F P.Visual servo tracking method based on automatic identification system for vessels in controlled areas of Yangtze River[J].Journal of Computer Applications,2011,31(12):3 414-3 417,3 421.
[5]吴关胜,钟丽,龙艾芳,等.控制河段船舶远程通行指挥数据实时传输的设计[J].水运工程,2014(11):60-63,68. WU G S,ZHONG L,LONG A F,et al.Design on real⁃time data transmission in remote command system for controlled waterway[J].Port&Waterway Engineering,2014(11):60-63,68.
[6]赵帅兵,唐诚,梁山,等.基于改进卡尔曼滤波的控制河段船舶航迹预测[J].计算机应用,2012,32(11):3 247-3 250. ZHAO S B,TANG C,LIANG S,et al.Track prediction of vessel in controlled waterway based on improved Kalman filter[J]. Journal of Computer Applications,2012,32(11):3 247-3 250.
[7]甘少君.控制河段通行信号自动揭示系统设计与实现[D].重庆:重庆大学,2013.
[8]程伟.控制河段船舶通行指挥决策专家系统研究与实现[D].重庆:重庆大学,2014.
Design and implementation of ship traffic control system in double control waterway
WU Guan⁃sheng
(Changjiang Luzhou Waterway Bureau,Luzhou 646000,China)
Aiming at the problem of lacking effective access control method in double control waterway,double control waterway technology,database technology,artificial intelligence technology were designed with the consider⁃ation of practical facts.The system takes AIS as a main information source,and uses the improved Kalman filtering method to realize the real⁃time tracking and prediction of the ship′s position,on the basis of the time of ship arrival and through the reach,combines the control characteristics of the ship,finally makes the ship′s safe traffic order rules and command method.The application results of Luzhou Yongchuan section double control waterway shows that the proposed system has practical feasibility,reduces the work intensity of the workers,and improves the navi⁃gation service level and traffic control efficiency.
control reach;inland ECDIS;track prediction;traffic order;Kalman filtering
TP 317
A
1005-8443(2016)04-0422-04
2016-04-11;
2016-06-16
交通运输部信息化技术研究项目(2013-364-548-200)
吴关胜(1961-),男,高级工程师,主要从事航道管理技术的研究。
Biography:WU Guan⁃sheng(1961-),male,senior engineer.
