空间相机大型长条形反射镜支撑结构设计
2016-02-15李旭孙世君汤天瑾
李旭孙世君汤天瑾
空间相机大型长条形反射镜支撑结构设计
李旭孙世君汤天瑾
(北京空间机电研究所,北京 100094)
针对某空间相机1m口径主反射镜的设计要求,以反射镜组件材料、径厚比、轻量化形式、支撑点数量等为设计变量,以施加1n重力载荷以及2℃温升时反射镜面形变化均方根误差为目标函数,提出了一种三段可装配式柔性支撑结构。与常用的球铰支撑和Bipod支撑相比,文章中的支撑结构没有相对运动、机械摩擦和间隙,可以使反射镜基频更高。当受到载荷作用时,背板会产生变形,支撑结构中的柔性环节能够隔离由于背板变形而产生的应力,从而保证反射镜的面形精度。文章采用有限元分析的方法对反射镜组件动态特性、静态特性和热特性进行分析。结果表明,反射镜组件基频足够高、光轴水平时,同时施加1n重力载荷和2℃温升时面形变化均方根值能够满足设计要求,反射镜支撑结构设计合理。
反射镜 柔性支撑 有限元分析 空间相机
0 引言
随着成像需求的增加,空间相机的地面覆盖面积越来越大,分辨率及成像品质越来越高,反射镜的口径也不断增大[1-2]。反射镜是反射式光学系统的关键部件,对系统成像品质有着重要的影响。反射镜通过支撑结构和相机主结构连接,其支撑技术是大口径反射镜工程应用中最关键的技术之一[3]。良好的支撑结构设计是大口径反射镜能够满足性能要求的一个重要保证[4]。这就需要解决大口径反射镜及其支撑结构设计方面的问题。
大口径反射镜支撑结构是近几年国内外研究的热点。如美国的高分辨率成像卫星GeoEye主镜口径达到1.1m,采用了背部六点Bipod支撑。俄罗斯的SiC反射镜直径为630mm,采用了背部三点球头支撑[5]。美国Kepler卫星主镜材料采用ULE玻璃,通光口径达到了1 450mm,支撑结构是由碳纤维和钛合金制成的三个倒立Bipod[6]。文献[7]研究了口径为1 080mm的反射镜,采用了背部九点柔性支撑。支撑结构会根据反射镜的指标要求不同而不同,需要对反射镜支撑结构进行详细设计,保证反射镜能够满足要求。
本文以某空间相机大型长条形1m口径主反射镜为研究对象。光学设计中对主反射镜提出的要求是组件频率≥120Hz。地面测试时,由1n重力(三个方向)引起的反射镜镜面最大位移小于0.015mm,面形变化均方根值(RMS)在与光轴垂直的两个方向小于/50(=632.8nm);在轨温度波动±2℃,引起的反射镜镜面最大位移小于0.015mm,面形变化RMS要求小于/50。几种工况耦合下的最大位移要控制在0.02mm以内,面形控制在/40。按照这个指标要求对反射镜进行支撑结构的设计,然后通过有限元软件对结构进行仿真分析。
1 反射镜组件设计
1.1 轻量化设计
在轻量化方式上,传统的反射镜镜背一般设计成平面,在背面加工三角形、四边形或六边形的轻量化孔[8-9]。这种轻量化形式面密度较大,轻量化率较低。因此,本反射镜采用侧面加工直孔或盲孔进行轻量化,轻量化孔的大小根据反射镜厚度有所不同。轻量化后的剖视图如图1所示。这种轻量化结构形式保持了反射镜镜背的完整性,反射镜的抗弯刚度较高,反射镜在厚度方向尺寸可以做到很小。主镜的径厚比约为11,最大限度地减轻了反射镜的质量,提高了反射镜的比刚度。

图1 反射镜轻量化模型剖视图
1.2 支撑形式选择
空间相机反射镜支撑有很多种,按照支撑位置的不同可以分为中心支撑、周边支撑、侧面支撑和背部支撑[10-15]。对于口径不是很大的反射镜,过去一直使用中心打盲孔支撑和周边装框式支撑,这些支撑技术在过去一直有很广泛的应用,也已经比较成熟。一般来讲,当反射镜口径大于500mm时,中心打盲孔支撑方式会使镜面变形过大,而周边装框式支撑会显著增大反射镜的尺寸,也不适用于大口径反射镜。因此,大口径反射镜一般采用侧面支撑和背部支撑,侧面支撑一般用于大长细比反射镜,本文中反射镜长细比不大,因此,本文采用背部支撑形式。背部支撑就是在反射镜背部打一定数量的盲孔,将支撑组件胶结于盲孔内。背部支撑在不增大光学系统整体尺寸的情况下很好地减轻了由于主反射镜环境温度变化及空间微重力作用下主反射镜的变形,因此是大口径反射镜使用最多的支撑结构型式。
在支撑点数选择方面,反射镜支撑点一旦多于3点,就会大大增加结构的复杂程度,同时加工检测装调难度也有所增加,因此在工程中应在满足支撑刚度的前提下尽可能减少支撑点数[16],考虑到本文反射镜的尺寸和质量,确定采用背部三点支撑形式。反射镜组件如图2所示。

图2 反射镜组件装配图
1.3 支撑结构选择
反射镜在轨运行时要承受空间热载荷的变化,由于反射镜与支撑结构不可能做到完全一致的材料特性匹配,两种材料受热后变形量不同,从而产生热应力,影响面形精度[17-18]。因此需要支撑结构能够卸载应力,使面形精度能够达到要求。目前常用的支撑结构主要有球形铰链和Bipod结构等。球形铰链一般设计在接头部位,利用球面支撑仅约束线位移而不约束角运动的特点,避免外部力矩通过连接接头传至反射镜。图3为球形铰链组件,组件下部的圆柱杆在反射镜内部,球头插在圆柱杆内,铰链上部与背板连接。当反射镜组件产生热载荷或重力载荷时,球形铰链可以通过转动来卸载应力,从而保证面形精度。这种形式间距较小,结构紧凑,但会存在相对运动,是一种不稳定支撑,球套加工、表面处理的工艺要求高,在产生振动时容易与反射镜发生碰撞,影响精度。

图3 球形铰链
Bipod结构由6个长度可设计的支架,两两一组构成3个Bipod支撑结构,固定到反射镜的背部或侧面,通过调整每组Bipod支架相互间的角度,可以将支撑力的交点(瞬时支点)放置到反射镜的重心处。每一个Bipod支撑结构等效于一个双臂铰链或十字形挠性装置,具有旋转适应性,瞬时支点即为其枢轴位置。Bipod结构简单,易加工,而且精度较高。图4为某圆形反射镜Bipod支撑的设计实例。但这种结构要求支撑结构与反射镜材料特性要一致,而且由于Bipod杆的存在使其需要占有较大的空间,而且会降低反射镜的基频。

图4 Bipod结构
本文中的反射镜组件要求反射镜与背板间隙较小,而且要求基频较高,要达到120Hz以上,而以上两种方案都不能满足要求,本文采用柔性组件支撑形式。这种支撑形式没有相对运动、机械摩擦和间隙,而且体积较小,基频较高[19-20],目前国内外已经对柔性支撑进行了研究,柔性组件通常采用两段式设计,柔性环节与背板为直连式,如图5所示。本文提出了一种三段可装配式柔性支撑形式,这种形式在反射镜组件受到载荷时可以更好地卸载产生的应力,保证面形精度。

图5 柔性环节
1.4 支撑结构设计
柔性组件由柔性环节、连接件、锥套3部分组成,见图6。柔性环节选用钛合金材料,通过在柔性环节上加工两个相互垂直的柔性槽,来释放这两个方向的自由度,为使柔性环节的刚度降低,设计了一个复合十字结构,这个结构是用来释放绕光轴转动的自由度。当受到重力以及热载荷作用时,产生的应力会首先使柔性环节变形,从而释放应力,保证反射镜面形精度。柔性环节与反射镜间设计一个锥套,锥套选用与SiC热胀系数一致的殷钢材料(4J36),锥套与反射镜采用侧面粘接,在锥套底面不设粘接点,可以最大程度减小粘接应力对反射镜的影响。设计锥套的作用是保证在点胶后,柔性组件可以与反射镜粘接紧密。通过优化设计,确定锥套的锥度为1∶17。本文在柔性环节与背板间设计一个连接件,如图7所示。连接件也进行了柔性设计,释放由于背板的变形而产生的应力,提高面形精度。同时也使柔性环节易于加工,材料选择更加灵活。

图6 柔性组件

图7 背板连接件
1.5 背板设计
背板是与相机镜框直接连接的结构。在材料选择方面,应选用密度小,刚度大的材料。这样可以使镜框的形变尽可能小的影响反射镜的面形精度,通过查阅相关材料参数,确定采用高体分SiC/Al材料。在结构设计上,要对背板进行轻量化设计。背板的轻量化是在背板上留下若干数量的加强筋,然后将其余部分切除,最后进行拓扑优化。这种设计的轻量化率可以达到80%以上,优化后的背板结构如图8所示。
图8 背板结构
2 有限元分析
反射镜在空间环境中承受微重力和热载荷工况,会产生变形,导致光学元件的波前畸变,从而影响空间相机的成像品质[12],为了验证反射镜组件设计是否满足设计指标要求,需对反射镜组件进行仿真分析。
2.1 有限元建模
在反射镜镜体设计阶段,采用Pro/Engineer软件进行参数化建模,然后将三维模型导入有限元前处理软件Hypermesh中,采用四面体网格划分功能,对反射镜、柔性环节、背板进行四面体网格划分,根据后续分析计算的精度不同,对不同结构的网格疏密有所不同。有限元网格划分如图9所示。其中,锥套与反射镜之间采用胶接,在锥套与反射镜间建立一个胶层,胶层刚度远远小于其它结构刚度,锥套与胶层、胶层与反射镜之间都采用部分节点重合进行连接。柔性组件的各部件间、柔性组件与背板间为螺栓连接,建立仿真模型时采用Rbe2单元连接,如图10所示。

图9 反射镜组件有限元模型

图10 柔性组件螺栓连接结构建模
建模所用材料参数如表1所示。
表1 有限元分析材料参数

Tab.1 Material parameters for finite element analysis
2.2 静力学分析
静力学分析的边界条件为在反射镜背板与相机主框架连接位置的3个平面上每个平面施加6点约束,6个约束点分别在平面的4个边角附近以及两条长边中点上,见图11。

图11 约束点位置示意图
分别计算反射镜组件在1n重力向(短轴方向)、向(长轴方向)、向(光轴方向)下的面形变化,计算结果如图12所示。由图可以看到,在向下的位移量最大,向下位移量最小,但都小于0.015nm。
另外,在计算施加1n重力的同时再施加2℃均匀温升,反射镜组件的面形变化,如图13所示,可以看到,施加温度载荷后,位移量有所增大,但依然满足指标要求,面形变化数据见表2。

图12 1gn重力载荷作用下组件的变形
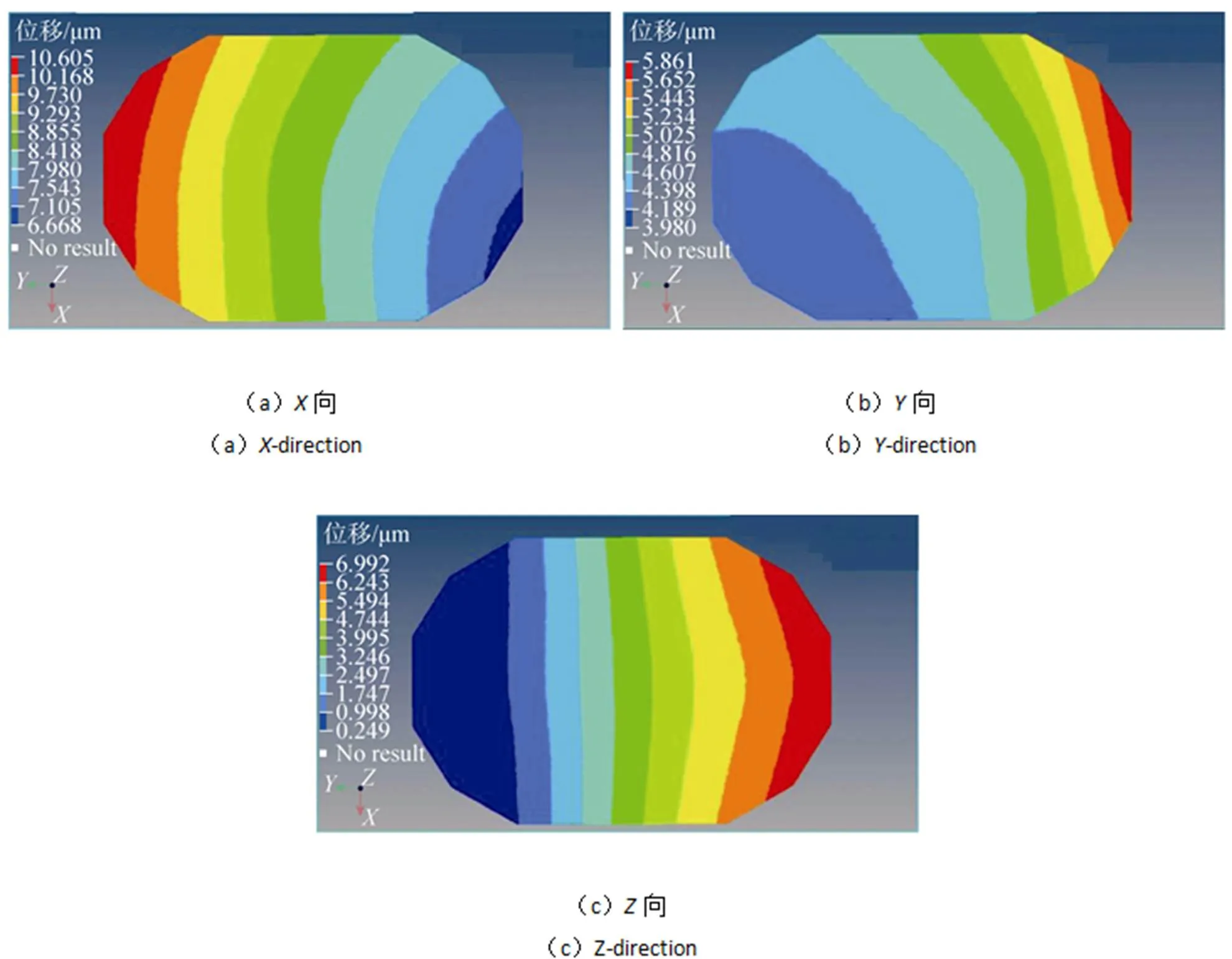
图13 1gn重力和2℃温升作用下组件的变形
表2 组件面形变化分析结果

Tab.2 Analysis results of the mirror surface figure changes
从分析结果可以看出,反射镜在向重力下面形误差较大,但本反射镜采用光轴水平装调,向面形误差对反射镜没有影响。而在光轴水平时,单独施加、向重力和、向重力与温度共同耦合作用下面形精度都优于/50,最大位移小于0.015mm,满足指标要求。
2.3 模态分析
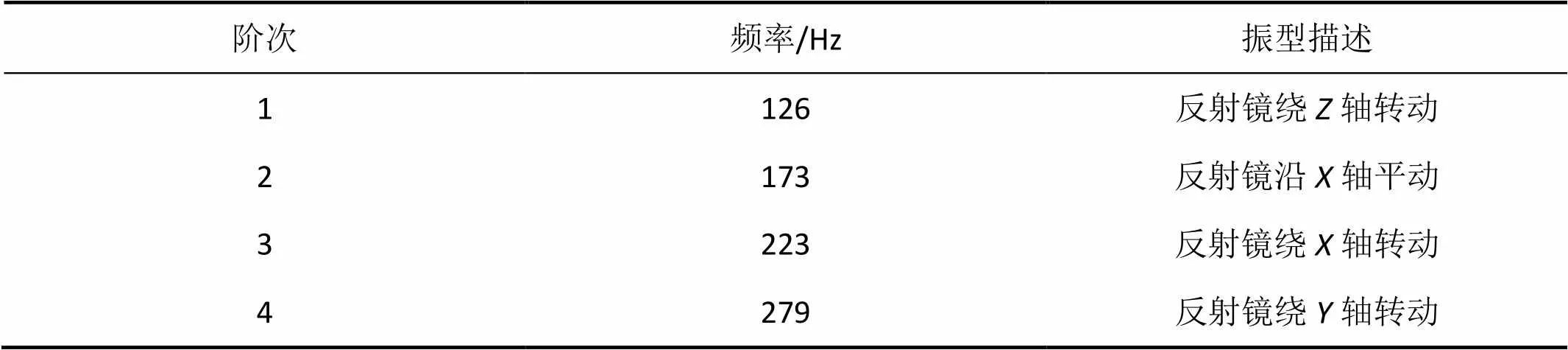
模态分析是考察反射镜组件动态刚度的重要指标,通过仿真分析来确定反射镜组件的基频,并与技术要求中给定的基频进行比较,从而确定反射镜是否具有足够的动态刚度。本文仿真分析了反射镜组件的前四阶模态,如图14所示。

图14 反射镜组件前4阶模态
表3列出了前4阶模态,可以看出,一阶固有频率为126Hz,符合设计要求。
表3 反射镜组件前4阶模态分析结果
Tab.3 Modal analysis result of mirror component
3 结束语
本文针对某大型长条形空间反射镜的设计指标和要求,结合反射镜的材料和轻量化形式,提出了一种三段可装配式柔性支撑结构,通过柔性支撑的变形来隔离应力,并利用有限元软件对反射镜组件进行了力学和热分析,通过分析结果可以看出,组件在1n重力和2℃温升共同耦合作用下X向面形变化RMS只有7.646nm,在方向面形变化RMS只有8.348nm,均满足小于/40的光学指标;模态分析结果表明,组件的一阶频率达到126Hz,具有足够的结构刚度。综上所述,本文所设计的反射镜柔性支撑设计合理,能够满足工程需要,具有空间环境适应性。本文也为其它大口径反射镜支撑设计提供了参考。
[1] BARTO A, ACTON D S, FINLEY P, et al. Actuator Usage and Fault Tolerance of the James Webb Space Telescope Optical Element Mirror Actuators[C]//Conference on Space Telescopes and Instrumentation. Amsterdam(NL): SPIE, 2012.
[2] YAN C, LIU W, WU Q. Design and Analysis on a Kind of Primary Reflector Support Structure Based on Thermal Compensation Principle[C]//International Symposium on Advanced Optical Manufacturing and Testing Technologies. Xiamen: SPIE, 2012.
[3] PIERARD M, FLEBUS C, NINANE N. The 3.6m Indo-Belgian Devasthal Optical: the Active M1 Mirror Support[C]//Conference on Ground-based and Airborne Telescopes IV. Amsterdam(NL): SPIE, 2012.
[4] KANEDA H, NAITOH M, NAKAGAWA T, et al. Manufacturing and Optical Testing of 800mm Lightweight all C/SiC Optics[C]//ROBICHAVD J L, KRÖDEL M, GPODMAN W A. Proceedings of SPIE Volume 8837: Material Technologies and Applications to Optics, Structures, Components, and Sub-Systems. SPIE, 2013: 7246-7254.
[5] LOGUT D, BREYSSE J, TOULEMONT Y, et al. Light Weight Monolithic Silicon Carbide Telescope for Space Application[C]//MAZURAY L,WARTMANN R. Proceedings of SPIE Volume 5962: Optical Design and Engineering II. Jena, Germany: SPIE, 2005: 59621Q1-12.
[6] ZINN J, JONES G. Kepler Primary Mirror Assembly: FEA Surface Figure Analyses and Comparison to Metrology[C]. Optical Manufacturing and Testing VII. San Diego: SPIE, 2007.
[7] 刘宏伟, 张芹, 丁亚林, 等. 基于有限元分析的长条状主镜支撑结构设计[J]. 光学精密工程, 2003, 11(6): 555-559. LIU Hongwei, ZHANG Qin, DING Yalin, et al. Design of Strip Primary Mirror Supporting Structure Based on Finite Element Analysis[J]. Optics and Precision Engineering, 2003, 11(6): 555-559. (in Chinese)
[8] 郭喜庆, 王悦勇. 大口径反射镜几种轻量化孔结构形式的分析[J]. 光学精密工程, 2000, 8(6): 518-521. GUO Xiqing, WANG Yueyong. Analysis of Structural Forms of Lightweight Hole Heavy-caliber Mirror[J]. Optics and Precision Engineering, 2000, 8(6): 518-521. (in Chinese)
[9] 杨洋, 孙宝玉. 长条反射镜轻量化及支撑结构设计[J]. 长春工业大学学报(自然科学版), 2010, 31(4): 403-406. YANG Yang, SUN Baoyu. Design and Analysis of Lightweight Structure and Support for Rectangular Mirror[J]. Journal of Changchun University of Technology (Natural Science Edition), 2010, 31(4): 403-406. (in Chinese)
[10] 曾勇强, 傅丹鹰, 孙纪文. 空间遥感器大口径反射镜支撑结构型式综述[J]. 航天返回与遥感, 2006, 27(2): 18-27. ZENG Yongqiang, FU Danying, SUN Jiwen. Summary of Support Structure Patterns of Large Mirror for Space Remote Sensor[J]. Spacecraft Recovery and Remote Sensing, 2006, 27(2): 18-22. (in Chinese)
[11] 杨秉新. 空间相机用碳化硅SiC反射镜的研究[J]. 航天返回与遥感, 2003, 24(1): 15-18. YANG Bingxin. Research of SiC Reflection Mirror for Space Camera[J]. Spacecraft Recovery & Remote Sensing, 2003, 24(1): 15-18. (in Chinese)
[12] 刘湃, 黄巧林, 杨居奎. 大口径长焦距相机主次镜支撑结构方案初步研究[J]. 航天返回与遥感, 2014, 35(3): 60-67. LIU Pai, HUANG Qiaolin, YANG Jukui. Research on Support Structure between Primary and Secondary Mirror in Large-aperture and Long-focal-length Space Camera[J]. Spacecraft Recovery and Remote Sensing, 2006, 27(2): 18-22. (in Chinese)
[13] 陈晓丽, 王彬, 杨秉新. 大口径超轻型反射镜定位和支撑方案研究[J]. 航天返回与遥感, 2010, 31(3): 15-20. CHEN Xiaoli, WANG Bin, YANG Bingxin. Study of Positioning and Mounting Scheme of Large Aperture Ultra-light Space Reflector[J]. Spacecraft Recovery and Remote Sensing, 2010, 31(3): 15-20. (in Chinese)
[14] 王伟之, 高卫军, 郭崇岭. 空间相机结构设计中的拓扑优化及尺寸优化[J]. 航天返回与遥感, 2012, 33(6): 67-73. WANG Weizhi, GAO Weijun, GUO Chongling. Topology and Size Optimization Technologies Applied in Structure Design of Space Camera[J]. Spacecraft Recovery and Remote Sensing, 2012, 33(6): 67-73. (in Chinese)
[15] YODER P. Opto-mechanical Systems Design[M]. New York: Marcel Dekker Inc, 1993.
[16] 李志来, 徐宏. 长条形空间反射镜及其支撑结构设计[J]. 光学精密工程, 2011, 19(5): 1039-1047. LI Zhilai, XU Hong. Design of Rectangular Space Mirror and its Support Structure[J]. Optics and Precision Engineering, 2011, 19(5): 1039-1047. (in Chinese)
[17] OSAWA Y, HIRAMATSU M, ICHIDA K. A Panchromatic Three-line Sensor for Mapping Boarded on ALOS[C]. Sensors, Systems, and Next-Generation Satellites II, SPIE, Barcelona, 1998.
[18] 鲍赫, 李志来. 长条型SiC反射镜轻量化及支撑结构的设计[J]. 光学技术, 2008, 34(4): 593-596. BAO He, LI Zhilai. Design of the Strip SiC Mirror Supporting Structure and Lightweight[J]. Optical Technique, 2008, 34(4): 593-596. (in Chinese)
[19] 崔永鹏, 何欣, 张凯. 采用三点定位原理的反射镜支撑结构设计[J]. 光学仪器, 2012, 34(6): 56-61. CUI Yongpeng, HE Xin, ZHANG Kai. The Support Design of Reflected Mirror from the Principle of Three Points Supported[J]. Optical Instruments, 2012, 34(6): 56-61. (in Chinese)
[20] 罗廷云, 张凤芹, 范斌. 大长细比反射镜侧面支撑结构设计与分析[J]. 航天返回与遥感, 2013, 34(4): 66-70. LUO Tingyun, ZHANG Fengqin, FAN Bin. Design and Analysis of Side Support for Large Aspect Ratio Mirror[J]. Spacecraft Recovery and Remote Sensing, 2013, 34(4): 66-70. (in Chinese)
Design of Support Structure for Large Mirror of Space Camera
LI Xu SUN Shijun TANG Tianjin
(Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)
By taking the material, diameter-thickness ratio, lightweight form, and number of support point as design variables and the mirror shape change root mean square error(RMS)under 1ngravity load and 2℃ temperature increment as objective function, a three-section assembled flexible support structure is proposed for a 1m diameter primary mirror of space camera is introduced. Compared with the commonly used spherical hinge support and bipod support, the support structure proposed in this paper has no relative motion, mechanical friction and clearance, and can make the mirror’s frequency higher. The backboard would deform when subjected to loads. The flexible part of the support structure can isolate the stress caused by the deformation of the backboard so as to ensure the surface figure accuracy of the mirror. By using the finite element analysis method to analyze the mirror, the main parameters include mirror component dynamic, static and thermal characteristics. The results demonstrate that the fundamental frequency of the mirror component is high enough and the RMS value of surface shape change meets the design requirements under the conditions of 1ngravity load and 2℃ temperature increment when the optical axis is level. The design of the mirror support structure meets the design requirements.
mirror; flexible support; finite element analysis; space camera
(编辑:王丽霞)
V475.3
A
1009-8518(2016)03-0091-09
10.3969/j.issn.1009-8518.2016.03.011
李旭,男,1990年生,2013年获天津大学机械设计制造及自动化专业学士学位,现在中国空间技术研究院光学工程专业攻读硕士学位。研究方向为大口径反射镜支撑技术。E-mail:lixu_1990@163.com。
2015-12-19
国家自然科学基金项目(11304012)
