平台惯导静基座自对准方案特性分析与验证
2016-02-11祝佳芳王新龙邹静如
祝佳芳,王新龙,邹静如
(1. 北京航空航天大学 宇航学院,北京 100191; 2. 北京机电工程总体设计部,北京 100854)
平台惯导静基座自对准方案特性分析与验证
祝佳芳1,王新龙1,邹静如2
(1. 北京航空航天大学 宇航学院,北京 100191; 2. 北京机电工程总体设计部,北京 100854)
初始对准作为平台惯导的关键技术之一,是影响平台惯导系统导航精度的重要因素。本文介绍了几种常用平台惯导初始自对准方案的理论、方法与特点,包括罗经自对准、多位置自对准、基于Kalman滤波的自对准、连续旋转自对准和基于自抗扰控制技术的自对准。从对准的快速性、准确性和抗干扰性三方面出发,对几种方案进行了综合分析与比较。最后,对两种典型的自对准方案进行仿真验证与对比,指出平台惯导自对准面对的问题和未来自对准方案研究的方向。
平台式惯导; 自对准; Kalman滤波; 自抗扰控制
0 引 言
惯导系统有着高度的自主性、隐蔽性、全球性等优点,在航空、航天、航海以及陆地导航领域中得到广泛应用[1]。根据物理平台的有无,可以将惯导系统分为平台式惯导系统和捷联式惯导系统。平台式惯导可以隔离载体角运动,具有计算误差小、精度高的优点。在一些精度要求较高的场合,比如弹道导弹的发射、水下潜器的航行以及水面舰船等武器的导航,多采用平台式惯导[2]。
初始对准可以为之后的惯性测量提供基准,为导航工作提供必要的初始条件。因此,平台惯导在导航工作开始之前,必须要进行初始对准。目前,平台惯导静基座对准可分为自对准和引入外部辅助对准。自对准是利用惯导本身的惯性器件测量地球重力加速度矢量和地球自转角速率矢量,将其作为水平对准和方位对准的基准,将平台系对准导航系的方法[3-4]。自对准最大的特点是完全的自主性和高度的隐蔽性,这也是现代战争的发展对武器装备提出的新要求。因此,研究自对准技术具有重要意义。
1 平台惯导静基座常用自对准方案
1.1 罗经自对准
罗经自对准是利用平台惯导静基座误差方程,在频域设计水平回路使平台保持水平,利用罗经效应,设计方位负反馈回路,控制方位轴自动寻北的一种自对准方式[5-7]。罗经自对准包括水平对准和方位对准。


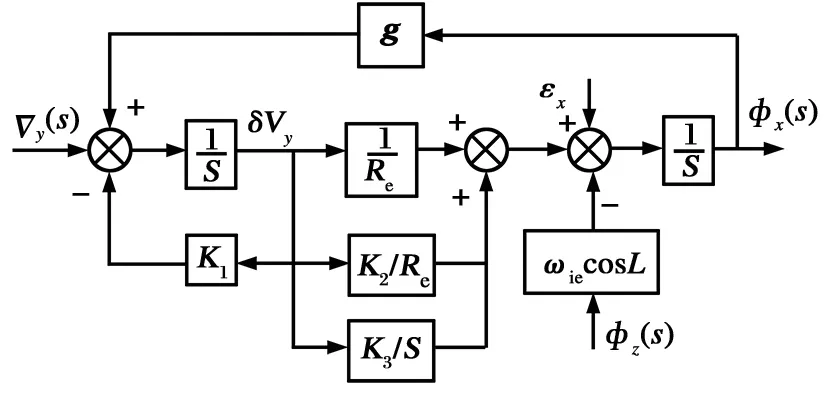
图1 水平对准回路原理框图
方位对准回路设计如图2所示。平台的天向误差角φz,通过交叉耦合项-φzωiecosL(其中:L为当地地理纬度; ωie为地球自转角速率)与平台水平误差角φx紧密联系。-φzωiecosL使得平台水平倾斜,从而由北向加速度计输出信号,控制方位轴自动寻北。罗经自对准可以做到不依赖任何外部辅助信息,实现平台自主对准,但方位对准时间过长,对准精度不高。

图2 方位对准回路原理框图
1.2 多位置自对准
多位置自对准通过多次改变平台惯导的位置,增加测量信息,可提高系统的可观测度,实现平台对准[8-13]。多位置对准一般包括锁定、调平、测漂等工作,操作示意图与流程如图3所示。
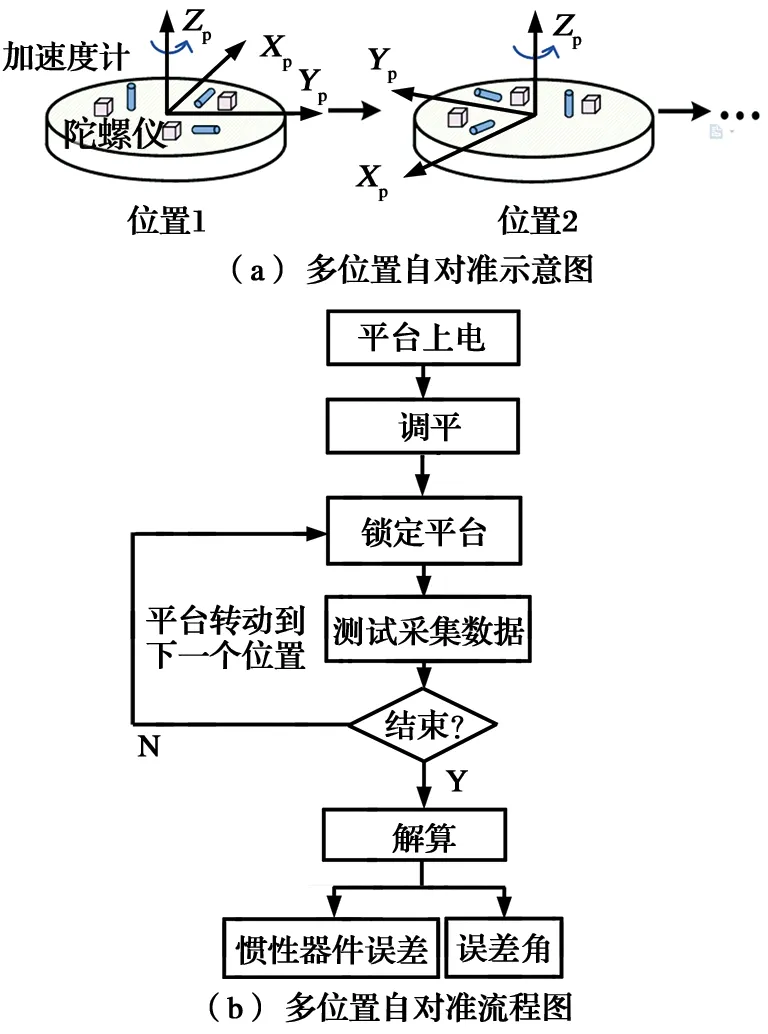
图3 多位置自对准示意与流程图
平台上电之后,首先进行调平,为之后的精对准打好基础。调平的目的在于控制平台尽可能接近水平面。接着将平台分别锁定在不同的位置,并且测量每一个位置惯性器件的输出,便可以采集平台在多个位置的数据。对于数据的处理有解析法、最小二乘法和滤波法等,可以解算或估计平台失准角以及惯性器件的误差。
1.3 Kalman及其相关滤波自对准
Kalman滤波算法是一种线性最小方差估计,有递推、计算量小的特点,适用于平稳随机过程[14]。惯导可以看作是一个随机系统,系统内部的一些状态可估计,一些状态可观测[15]。因此,利用惯导初始对准的误差方程建立Kalman滤波器的状态方程,以水平速度误差作为Kalman滤波器的量测量,就可以建立起Kalman滤波模型。

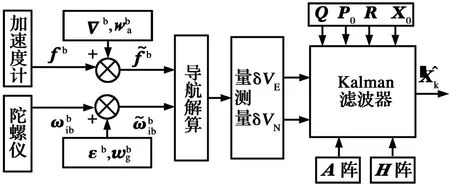
图4 Kalman滤波自对准流程图

这种自对准方案操作简便、计算量小、对准速度较快且对准精度较高,但是也存在弊端。首先,Kalman滤波对加速度计的水平偏置和东向陀螺仪的漂移没有估计效果,对方位陀螺仪的漂移估计效果也很差。其次,在使用过程中,需要建立完善的系统误差模型,并要求系统噪声统计特性已知。若这两个条件不能满足,将会导致滤波结果不准确甚至发散,并且对准过程中存在的非线性问题也得不到解决。
1.4 连续旋转自对准
连续旋转自对准是平台在外加力矩作用下,绕某一轴连续旋转进行对准的方法,大致流程如图5所示。首先设计平台旋转路径,让平台绕着某一轴线连续旋转,采集惯性器件的输出; 然后建立Kalman滤波模型,状态方程利用惯性平台在外加力矩作用下绕这一轴连续旋转的动力学模型建立,量测模型则利用加速度计输出建立。该方法可以估计失准角和惯性器件的误差。
连续旋转自对准只需要平台有一定精度的自转角功能,不需要其他繁琐的操作,对准速度得到了改善。并且在一般的Kalman滤波自对准方法中,加速度计零偏和东向陀螺漂移是不可观测的,但在该方法中,都可以被估计出来[16-19]。
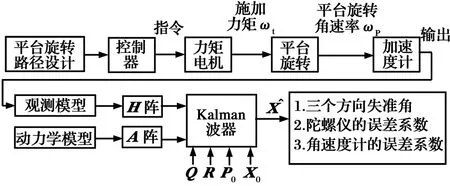
图5 连续旋转自对准流程图
1.5 基于自抗扰控制技术的自对准
自抗扰控制技术采用跟踪微分器TD、扩张状态观测器ESO以及非线性状态误差反馈NLSEF等相关理论,将系统的未建模动态和未知外扰作用归结为系统的“总扰动”,对其进行估计和补偿,是一种新型的控制方法[20-21]。跟踪微分器主要用于解决系统响应的快速性和超调之间的矛盾; 扩张状态观测器可以在系统模型近似的情况下,对状态量进行观测; 非线性状态误差反馈能优化误差的利用率。自抗扰控制技术常用于处理大范围以及非线性、时变和耦合系统的控制问题,这一特点正好可用于解决平台的静基座对准。
结合静基座误差方程和自抗扰控制技术的原理,设计自抗扰控制器,利用水平速度误差作为观测量,可以很好地估计水平方向的失准角。为了较快地估计方位失准角,在完成水平对准之后,利用式(1)可求取方位失准角:
(1)


图6 基于自抗扰控制技术的自对准流程
自抗扰控制器可很好地解决系统快速性和稳定性的矛盾,具有响应快、超调小、精度高和抗干扰能力强的优点。但其结构参数多而复杂,手动调整参数工作量大,因而使用受到了一定的限制。
2 平台惯导静基座自对准方案特性比较与分析
从对准的快速性、准确性和抗干扰能力三个方面对上述自对准方案特性进行分析与比较。
(1) 快速性。五种自对准方法所用时间如表1所示[9,14,17, 23-24]。可以看出,将滤波器或控制器引入对准环路中,可明显提高对准的快速性。
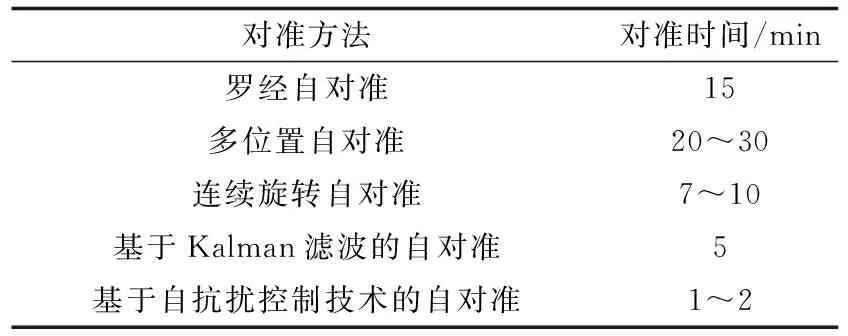
表1 不同自对准方案快速性对比
(2) 准确性。平台惯导对准精度主要受惯性器件精度和对准方法的影响。上述自对准方案中三个失准角的稳态误差相同,对准精度与惯性器件误差补偿效果有直接关系。罗经自对准和基于自抗扰控制技术的自对准不能估计惯性器件误差,因此无法提高对准精度; 基于Kalman滤波的自对准只能估计惯性器件的一部分误差; 而多位置自对准和连续旋转自对准由于增强了系统的可观测性,比较容易获取惯性器件误差甚至其他的误差系数,对准效果得到很好的改善。由此可见,改变平台的位置或者施加角运动可以增强惯性器件误差的可观测度,甚至实现惯性误差系数的自标定。
(3) 抗干扰性。罗经自对准从经典控制理论出发,在频域设计对准回路,其频带较低,因此对噪声有一定的抑制作用; 连续旋转自对准和多位置自对准对外界环境的依赖程度较大,对干扰的抑制作用较差; Kalman滤波对外界噪声和系统噪声分布特性的变化比较敏感,噪声的变化通常会导致滤波偏差较大甚至发散; 而基于自抗扰控制技术的自对准方案最大的特点是将外部扰动和内部扰动归结成一个扩张的系统状态变量,进行估计与补偿,这种方法的抗干扰性能是最好的。
3 仿真验证
目前,罗经自对准、多位置自对准和连续旋转自对准的研究相对成熟,而基于Kalman滤波和自抗扰控制技术的两种自对准方案是近年来研究的热点。因此,针对这两种方法,利用开发的仿真平台对其进行仿真验证和对比。
3.1 初始条件
(1) 初始姿态角:俯仰角θ=0°,横滚角γ=0°,偏航角ψ=0°;
(2) 初始纬度:L=40°N;
(3) 初始失准:φE=10″,φN=5″,φU=60′;
(4) 惯性器件误差:陀螺常值漂移为0.02 (°)/h,随机漂移为0.01 (°)/h; 加速度计零偏为1 μg; 随机偏差为0.5 μg。
3.2 仿真结果与分析

为了对比分析基于Kalman滤波和基于自抗扰控制技术两种自对准方法的特点,在同样的仿真条件下,对基于Kalman滤波的自对准方法也进行了仿真,结果如图7中虚线所示。
为进一步对比上述两种方案在受扰情况下的对准效果,在100~150 s仿真时间内,方位上加入一个正弦扰动信号N(t)=5sin(0.01t)。受扰情况下,上述两种方案的对准结果如图8所示。
结合图7~8,从快速性、准确性和抗干扰性三方面对两种方法的对准效果进行分析可知:
(1) 快速性对比。系统在理想情况下工作时,由于观测量相同,直接反映了水平失准角的信息,因此二者的水平对准速度相当。但方位失准角的收敛时间差别很大,见图7(c)。自抗扰的方位对准速度比Kalman滤波快了近100 s,优势明显。
(2) 准确性对比。两种方案的对准精度相当,这与之前的理论分析吻合。对准精度主要受惯性器件零偏和漂移的影响,但是自抗扰控制器的性能优越、曲线平稳,精度可以长时间保持。
(3) 抗干扰性对比。由图8可知,扰动情况下,Kalman滤波水平对准效果受到的影响较小,而方位失准角的估计结果有一个幅度很大的扰动,效果不理想。但基于自抗扰技术的对准结果并没有受到太大影响。由此可见,Kalman滤波器的抗干扰性和鲁棒性不如自抗扰控制器好。
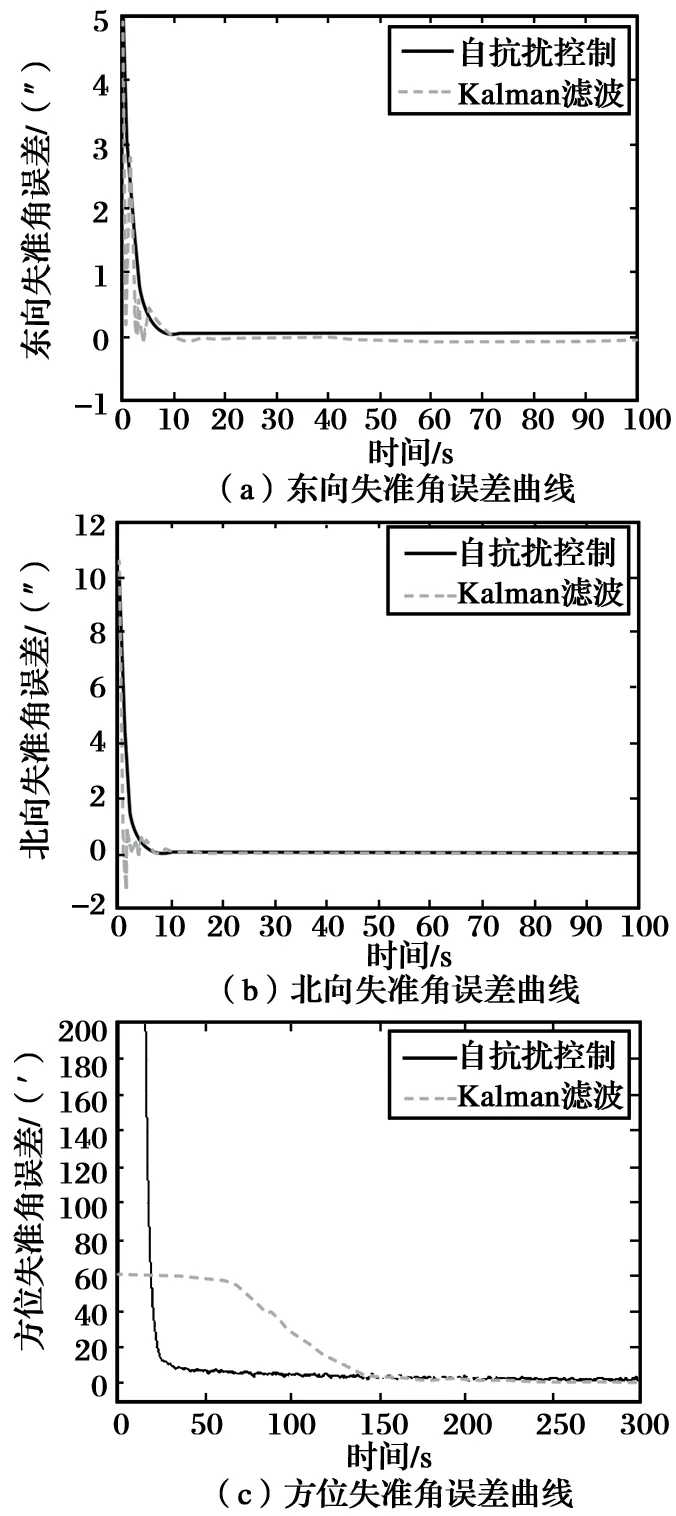
图7 理想情况下两种方案对准结果对比图
4 结 束 语
平台惯导自对准普遍存在对准时间长、对准精度不高的问题,原因在于系统不完全可观测。因此,未来自对准方法的研究工作将围绕两方面来进行:一是如何提高惯导系统的可观测度; 二是如何增强滤波器或控制器的性能。改变平台惯导的位置可以很好地提高观测度,因此,连续旋转自对准将会有更广泛的应用。Kalman滤波器和自抗扰控制器的引入虽可以加快对准速度或提高系统的抗干扰性能,但都存在一些弊端,如对噪声比较敏感或参数整定工作困难等。可以通过引入一些自适应方法或快速学习算法来优化这类滤波器或控制器,从而改善对准效果。另外,一些新的理论、方法和技术也在不断地被应用到初始对准领域中,如组合对准技术、最优控制理论等。随着研究的不断深入,平台惯导的自对准技术会得到更进一步的发展。

图8 受扰情况下两种方案对准结果对比图
[1] 王新龙. 捷联式惯导系统动、静基座初始对准[M].西安: 西北工业大学出版社, 2013.
[2] 王琛琛, 王新龙, 黄海. 扰动观测器在惯导平台稳定回路中的应用方法[J]. 鱼雷技术, 2012, 20(3): 195-200.
[3] 以光衢. 惯性导航原理[M]. 北京: 航空工业出版社, 1987.
[4] 巩乃英, 冯振声. 导弹惯性平台自对准[J]. 国防科技大学学报, 1980(1):178-189.
[5] 纪明. 几种陆用惯性自寻北方案的比较[J]. 应用光学, 1992(4): 40-44.
[6] 秦永元. 惯性导航[M]. 北京: 科学出版社, 2014.
[7] Hung J C, White H V. Self-Alignment Techniques for Inertial Measurement Units[J]. IEEE Transactions on Aerospace and Electronic Systems, 1975, AES-11(6):1232-1247.
[8] 王新龙, 申功勋. 惯导系统可观性的全面分析研究[J]. 航天控制, 2002, 20(3): 14-19.
[9] 任思聪. 带单轴稳定惯导系统的双位置对准法[J]. 西北工业大学学报, 1988 (4):6-15.
[10] 邹志勤, 杜祖良. 平台惯导系统初始自对准技术研究[J]. 战术导弹技术, 1995 (1): 47-52.
[11] 王新龙, 申功勋. 一种快速精确的惯导系统多位置初始对准方法研究[J]. 宇航学报, 2002, 23(4): 81-84.
[12] 孟卫锋,袁爱红,贾天龙, 等.高精度惯性平台十六位置自标定方案[J].中国惯性技术学报, 2015, 23(2): 150-155.
[13] 付梦印, 邓志红, 张继伟. 卡尔曼滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.
[14] 胡宏灿, 郭立, 朱俊株. 卡尔曼滤波器在导航系统初始对准中的应用[J]. 微电子学与计算机, 2006, 23(2): 163-165.
[15] 王荣颖, 许江宁, 卞鸿巍. 基于可观测性分析的方位旋转式惯导初始对准仿真研究[J]. 中国惯性技术学报, 2009, 17(1): 15-19.
[16] Sciegienny J, Nurse R, Kampion P, et al. Inertial Navigation System Standardized Software Development, Final Technical Report Volume II: INS Survey and Analytical Development[R]. Massachusetts, USA: Charles Stark Draper Laboratory, Inc., 1976.
[17] 杨华波, 蔡洪, 张士峰,等. 高精度惯性平台连续自标定自对准技术[J]. 宇航学报, 2006, 27(4): 600-604.
[18] Jackson A D. Continuous Calibration and Alignment Techniques for an All-Attitude Inertial Platform[C]∥American Institute of Aeronautics and Astronautics, Guidance and Control Conference, Key Biscayne, Florida, 1973.
[19] 曹渊, 张士峰, 杨华波,等. 一种新的惯性平台快速连续旋转自对准方法[J]. 兵工学报, 2011, 32(12): 1468-1473.
[20] 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京:国防工业出版社, 2008.
[21] 黄一, 薛文超. 自抗扰控制:思想、应用及理论分析[J]. 系统科学与数学, 2012, 32(10): 1287-1307.
[22] 宋金来, 韩京清. 平台式惯导系统的快速初始对准方法的研究[J]. 中国惯性技术学报, 2002, 10(1): 25-29.
[23] 宋金来, 杨雨, 许可康,等. 自抗扰控制在惯性导航系统初始对准中的应用[J]. 中国惯性技术学报, 2001, 9(4): 11-14.
[24] 张宗麟. 惯性导航与组合导航[M]. 北京: 航空工业出版社, 2000.
·简讯·
雷神公司的相控阵技术——供电和冷却
如同封装技术一样,AESA的散热处理和功率设计在过去三十多年也经历了飞速变化。AESA的射频器件会产生大量的热流,AESA的散热处理系统经历了飞速发展,包括基于液体流的冷却板技术、散热接口材料和受控CTE封装材料。在20世纪80年代,阵列主要通过热导管降低电子器件和环境之间的温升。如同封装技术发展到高密度设计一样,散热处理发展到采用小型的气体或液体散热组件。
对于高性能AESA电子器件,基于液体冷却是一种散热处理的优良选择,具有效率高的特点,其提供了一种经济性的方法,使得单片微波集成电路(MMIC)和T/R组件(TRM)维持在所需的温度,以实现高可靠性和电气性能。一些液体的冷却方案直接在TRM和MIMICs下设计冷却通道,而其他的一些方案则将TRM和MIMICs的热量引导到液体冷却支管。为了进一步提高冷却效率,新型的冷却系统在平面冷却结构和新型热传导设计上,尽量采用纳米或者微型通道设计并将液体流更加靠近MIMICs。气体冷却方法也在使用,尤其是在一些低功耗的设备上。相对液体冷却设计,气体冷却方法通常具有简单、经济特点,在一些系统条件许可的情况下可采用该方案。
功率调节技术随着平面磁性元件和小型化设备的发展在过去若干年也取得了进步。许多小型化的AESA使用集中式,因为供电与AESA比较靠近。大型的AESA必须将功率转换电子器件分布设计以降低导器件的体积和重量,提高其效率。采用高电压的GaN,可使采用更小的传导器件,并提高整个系统的功率效率,进而可显著降低率调节系统的重量。
(赵毅寰 天 光)
Analysis and Validation of Self-Alignment Methods of Platform Inertial Navigation System
Zhu Jiafang1, Wang Xinlong1, Zou Jingru2
(1. School of Astronautics,Beihang University,Beijing 100191,China;2. Beijing System Design Institute of Electro-Mechanic Engineering,Beijing 100854,China)
As one of the key technologies of platform inertial navigation system(PINS), initial alignment is an important factor which affects the accuracy of PINS. In this paper, the theories, methodologies and characteristics of several typical initial self-alignment methods of PINS, including gyrocompass self-alignment, multi-position self-alignment, self-alignment based on Kalman filter, continuous rotation self-alignment and self-alignment based on auto-disturbance-rejection control (ADRC) technology,are introduced in details. These methods are compared and analyzed from three aspects which consist of rapidity, accuracy and anti-jamming ability. In addition, the simulations are implemented to validate and compare two representative self-alignment methods. The problems faced by self-alignment of PINS and the research direction in the future are pointed out.
PINS; self-alignment; Kalman filter; ADRC
10.19297/j.cnki.41-1228/tj.2016.06.011
2015-11-02
航空科学基金项目(2013015004; 2015ZC51038); 卫星应用研究院创新基金项目(2014_CXJJ-DH_01)
祝佳芳(1990-),女,四川乐山人,硕士研究生,研究方向为惯性导航、组合导航。
TJ765; V249.32+8
A
1673-5048(2016)06-0049-06
