如何指定一台机械手
2016-02-09威猛巴顿菲尔美国公司JasonLong
文/威猛巴顿菲尔美国公司 Jason Long
如何指定一台机械手
文/威猛巴顿菲尔美国公司 Jason Long
作为一个注塑加工商,目前你的业务的应用领域在哪里?明天的成型项目又会是什么?在决定什么样的机械手最适合你的时候,你有必要对这些问题做出回答。
为机械手选择合适的设计是最大限度提高其价值的关键步骤之一。如果机械手没有为重型的高有效荷重工作做好准备,那它实际上就会变得无用。然而,当机械手只需处理短距离搬运、轻负载的任务时,购买长行程和高有效荷重的机械手则是浪费你的金钱。
要正确指定机械手,你就需要全面地了解你目前业务的应用领域,以及它可能发展的方向。既要为任何潜在的未来做好准备,同时也不能不切实际。
本文的目的是帮助你利用自己的成型知识,来为你的下一台机械手选择正确的设计。
机械手设计的三个主要方面包括:安装选项、有效荷重,以及前踢设计(用于大吨位注塑机)和后踢设计(用于小吨位注塑机)。
安装选项
每个成型单元都是独一无二的,而一台新的机械手其最重要的要素之一是它要尽可能无缝地符合成型单元设计。在注塑机上安装机械手的位置和它落下成品部件的地方,对于实现可能最为有效的成型过程是极其重要的。理想的情况是,机械手能够提供横梁模块化,以使成型人员能够移动到不同的方向来适应工作单元中的变化。
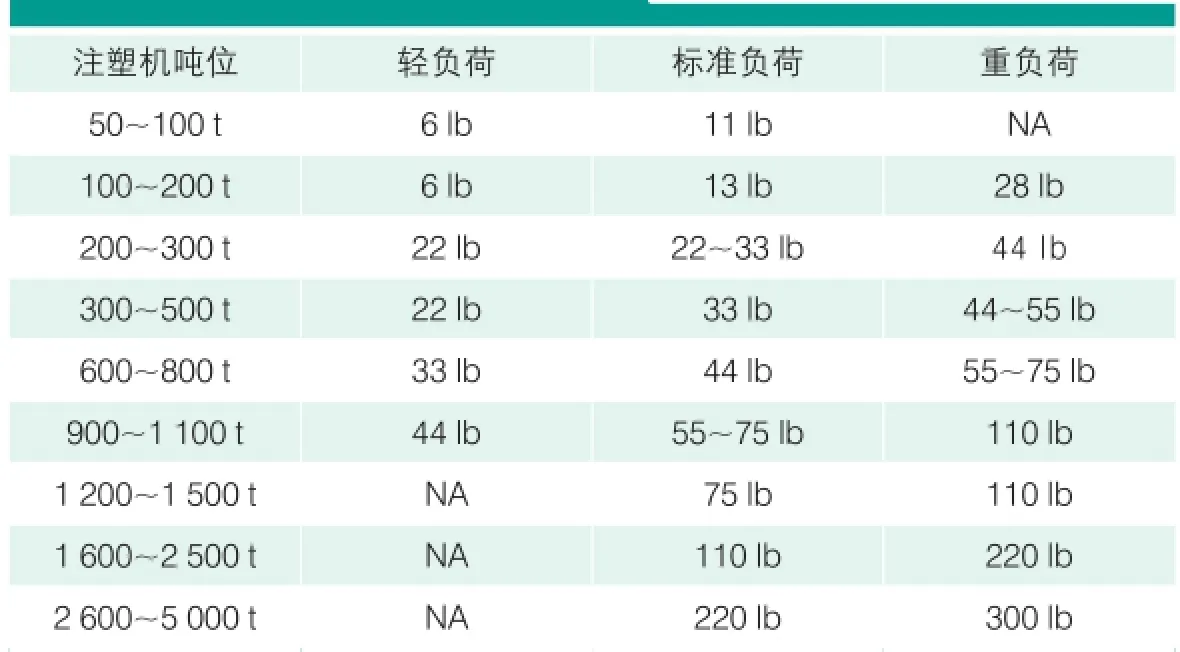
表 机械手的标准有效载荷推荐值
安装一台机械手有许多不同的位置,但4个标准位置是操作人员的侧面和后面以及T-座架和纵向。
从操作人员的侧面和后面落下部件,对于需要空间让操作者或模具安装者能从注塑机两侧门进入的应用而言是很好的。注塑机的侧面和后面经常会使用更短的水平行程,因为不需要更多的进入。这是两种最常见的机械手定位。
T-座架设计是一种分离不同部件的解决方案,无论是一侧为“左面”、另一侧为“右面”,还是把坏的部件落入一台造粒机中,同时把好的部件转移到另一侧成型单元的下一个阶段。这种设计也是可订制的,因为如果有必要,机械手可以偏向某一个侧面,使它在一个方向上能够达到稍远一些。T-座架易于进入注塑机门的设计与一般的操作人员后面或侧面设计是相同的。
纵向设计或L-安装,对于需要节省地面空间的成型商来说是最有用的。这种设计通过将部件放置在机器的合模端,使成型商可以比常规操作侧面设计放置多50%的机器(基于平面布局)。它还可以使用一台中央传送机,将所有的部件带到一个中央位置,而且需要的操作人员更少。为了使用这种设计,确保没有障碍或越过注塑机合模单元,包括合模压力缸、油过滤器、供水线或照明设备。成型商还应该确保为梁的支撑腿留有空间,并且水平行程可以使它经过压板至少留有拉杆的宽度。
有效载荷的确定
针对当前和未来的应用需求,机械手应该具有足够的有效载荷能力。记住,有效载荷的确定不只是测量塑料部件的尺寸或者注射量:
有效再荷=注射量+EOAT(末端臂治具)重量+重心补偿量。
例如,由于包含较重的材料和较坚固的EOAT,当以计算的所有有效载荷大小为标准时,在500 t注塑机上的嵌入应用可能需要机械手具有55~75 lb(1 lb=0.4536 kg)的有效载荷能力,尽管塑料部件本身的质量只有2 lb。记住,在计算适当的有效载荷时,除参考随附的机械手标准有效载荷推荐值外(见表),机械手的长期可靠性和坚固性也是重要的考虑因素。
前踢与后踢
中小型机器通常需要前踢(kick-forward)或者滑架向前的设计。这种设计使压板后面畅通,可以避开障碍物,如短筒注射装置上的料斗、具有进料喉的干燥机、歌林柱及机器过道等(如图1所示)。
大中型机器可以从采用后踢(kick-back)或滑架向后设计的机械手中获益,此设计更加平衡,而且允许更重的有效载荷(如图2所示)。如前所述,这个有效载荷考虑了EOAT的重量,所以当成型商需要一种用于汽车仪表板、保险杠或房屋墙面板的超大EOAT时,这种设计也是有用的。后踢也可以为模具上方的障碍物提供空隙,如芯筒和退扣架(unscrewing rack)等。

图1 对于大中型成型机,后踢设计更平衡,而且允许更重的有效载荷

图2 前踢设计更适合于中小吨位的注塑机。它们可以使压板后侧畅通以避开障碍物
二次翻转(secondary flip)或旋转轴也可以帮助部件从较大的成型机上脱模。这些轴可以是气动或伺服驱动,使部件在机械手退出成型区域时同时旋转或翻转。这使得部件在退出时更容易通过不好通过的空间。
有时候,采用1 500 t或以上的注塑机,注塑机高度上没有安装一台龙门式机械手及清除高架起重机等障碍物的空间。大多数的机械手制造商提供与起重机联动的选项。这些联锁装置有助于确保机械手停在一个安全的地方后才让起重机离开注塑机。
另一个提示是:机械手应该便于3个维度同时编程以允许曲线运动,而不是采用严格的线性依次单独动作的编程。3维动作使序列更高效,并可以减少机械手力学上的磨损和损坏。
要做到这点,必须正确指定机械手驱动器。今天,伺服驱动器一般都是标准的,同时高速和重负荷应用的伺服系统也可选择。高速是针对10 s以下的周期所需要的,重负荷是针对如托盘或大型汽车零部件等应用所需要的。
请注意,有些机械手制造商仍然使用气动缸代替伺服驱动器。它们大都质量不高、限制你的编程、阻碍你的有效载荷,而且需要比全伺服方案更多的维护。
机械手针对特殊的要求也应该有现成的选项,如附加的输入和输出、额外的一扇检修门、箱填充控件、延长的电源线、工装标识和起重机联锁。
和往常一样,这些都是通用的准则。每台成型机都是独一无二的,应用也有所不同,因而对于机械手的要求都是不同的。如果这些准则对你的公司都不十分适用,那么请联系你的机械手供应商,它会与你合作,找出匹配你具体应用的机械手。
关于作者
Jason Long是威猛巴顿菲尔美国公司(康涅狄格州托林顿)机械手和自动化业务的区域经理,他于2007年在威猛巴顿菲尔公司作为机械手现场服务人员开始其职业生涯。在加入威猛巴顿菲尔公司之前,他在SAS自动化公司担任了8年的高级自动化技术员。
