CAD/CAE集成的高速列车子系统仿真分析一体化平台
2016-02-09朱允瑞聂隐愚张卫华
唐 兆, 朱允瑞, 聂隐愚, 张卫华
(西南交通大学牵引动力国家重点实验室,四川成都610031)
CAD/CAE集成的高速列车子系统仿真分析一体化平台
唐 兆, 朱允瑞, 聂隐愚, 张卫华
(西南交通大学牵引动力国家重点实验室,四川成都610031)
为了使现有的通用商业多体动力学与有限元软件能满足高速列车子系统仿真建模的需求,利用开源组件和动态封装技术实现了可扩展弹性仿真平台架构框架,并基于该框架以高速列车弓网系统为例开发了高速列车子系统仿真平台(TPL.PC).该仿真平台的构建表明,所提出的框架能够提供几何建模、网格生成与编辑、数值代码求解和三维实时可视化高速列车仿真平台所需的常用功能,解决了子系统几何模型和仿真模型在这些环节中的互用性问题,使得各异构子系统之间在仿真计算迭代步的中间结果数据和最终仿真结果文件交换通畅.
仿真平台;软件架构;弓网系统;高速列车
高速列车大系统动力学(high-speed train vast system dynamics)是为适应高速列车在我国的快速发展而建立起来的工程学科分支[1-2],涉及弓网、轮轨、流固和机电等多个领域,其中一些子系统(如弓网系统)在仿真分析时,通常采用两种方式:一种是直接使用通用目的的商业软件包,另一种是使用专门针对弓网系统的专用软件包.通用目的的商业软件包主要指用于一般机械系统的多体动力学或有限元分析的软件包.基于通用目的的软件包对弓网系统进行仿真分析已有文献研究,如使用商业有限元软件包MSC-Marc建立弓网系统模型,分析随机风场对弓网系统动态性能的影响[3];使用商业有限元软件SAMCEF分析弓网接触动态性能,进行参数敏感性分析和性能优化[4-5];利用有限元Ansys和多体动力学软件Simpack采用虚拟样机的理念对受电弓零部件强度和刚度进行校核,计算接触网振动模态和自振频率,分析接触网动应力及疲劳可靠性[6].另一种方式是专门针对弓网系统开发的软件包,可以分为两类:一类是自行开发数学模型、前后处理和数值计算方法,如:西南交通大学基于自行建立的受电弓/接触网耦合系统理论计算模型,开发了PCRUN弓网动力学系统仿真软件,建立了功能相对完善的弓网系统仿真计算工具[7];欧洲在2005—2007年间联合各铁路机构进行EUROPAC项目研究,其中法国国家铁路公司(SNCF)开发的有限元软件OSCAR主要用于接触网系统的仿真模拟,IST开发DAP软件工具用于受电弓的模拟[8],最后整合为EUROPACAS,该软件可以三维仿真各种类型的弓网系统,也可同时兼顾风载、温度、路桥等多种工况.德国开发的已实现商业化的CATMOS软件[9]也是这一类型的代表,国内也有单位应用这一工具进行接触网优化[6].另一类是利用通用有限元或多体动力学商业软件进行开发,如:FAMOS[10]基于有限元软件包Abaqus;PrOSA[11]基于多体动力学软件包Simpack.
通用商业软件包进行弓网系统仿真设计针对性不强,对系统特有力或约束(如弓网接触力)没有现成力元组件可用.自行开发的软件包虽然针对性较强,由于专业局限性,往往没有完善的前后处理功能.联合商业软件进行仿真虽然是一种较好的策略,但由于商业软件本身出于自身利益的考虑,一些底层功能往往不对用户开放,不同软件包之间的数据交互和可操作性有局限性.此外,现有主流商业多体动力学和CAE软件,其后处理模块也存在一些缺陷或不足,如对连续数据的可视化操作不支持动态交互操作[12].在弓网系统中,接触网三维模型尺寸较大,且受电弓的几何尺寸相对于接触网的比例有较大的悬殊[13],在后处理时需要实时交互才能方便用户理解其动态行为,因此,平台需要支持动态交互操作的后处理可视化系统.除了利用相对完善的软件计算包进行分析以外,许多学者也开发了自己的数学模型和数值代码进行求解,这些代码往往没有完善的前处理或后处理功能,通常只针对某一特定问题,由于知识结构不同,往往也选用不同的语言进行开发,如Fortran、C、C++、Matlab等,这些代码对解决特定的问题有非常重要的意义.如何将这些代码有效耦合,提供丰富的前后处理功能,对于提高弓网系统的仿真设计分析水平和效率具有现实意义.
本文提出基于开源代码实现CAD/CAE高度集成的一体化高速列车子系统仿真设计分析平台,着重从平台的功能模块、架构模型以及数据模型的互操作性等方面给出了解决上述问题的方法.
1 平台集成架构
1.1 总体架构模型
开发高速列车子系统仿真设计分析平台需要多个学科和多个领域的软件组件和模块,这些基础组件和模块虽然单一技术都比较成熟,但重新组合和开发也需要耗费大量的人力和物力.开源软件(open-source software)为工业仿真提供了许多基础的组件库,特别是为大型软件平台架构提供了丰富的有用资源.许多成熟的商业软件广泛采用协议对应的开源软件作为基础组件.美国商业资讯2012年的研究报告指出,在CAD领域,高可用的开源CAD软件已经影响商业CAD供应的增长.在工业仿真领域,有许多有影响力的仿真开源组件库和基础平台,SALOME就是其中之一[14-15].欧洲利用SALOME平台建立核反应堆的多维多物理仿真分析NURESIM平台[16],除了使用SALOME提供的前后处理以外,还使用其集成多个数值计算核心代码.美国能源部参照SALOME组件结构开发了多维多物理核能源建模和仿真程序NEAMS[17].法国原子能机构结合商业软件和商业软件接口开发了用于求解PDEs方程的求解器Cast3M.鉴于SALOME平台的优越性,甚至使用SALOME替代了基于商业软件构建的平台用于超导磁体的机械行为仿真[18].
高速列车子系统仿真设计分析平台利用SALOME平台提供基础组件和通用的功能,基于SALOME的平台总体架构如图1所示.图1中,平台利用几何建模组件实现系统的几何建模,应用网格划分模块划分有限元网格,结合几何建模和网格划分生成求解前处理文件,将内嵌的前处理文件送给求解器进行求解,求解的结果和前处理模型一同传入后处理模块进行可视化展示和分析,整个过程一体化完成,不需要对外提供数据接口和交互.

图1 基于SALOME的平台总体架构Fig.1 Overall architecture of the simulation platform based on SALOME
1.2 基于动态组件结构的多体动力学与有限元联合仿真集成架构实现
平台架构要突破的主要问题是多体动力学和有限元的模型融合和内嵌联合仿真.由于多体动力学和有限元采用不同的时间积分算法,这为求解代码的数据交换和求解集成设置了障碍.解决这一问题的抽象实现是使用基于组件的分布异构编程模型,用这一模型将求解代码所需要的计算资源进行分割,便于程序进行分布式异构部署,基于组件的分布式异构编程模型如图2所示[19].
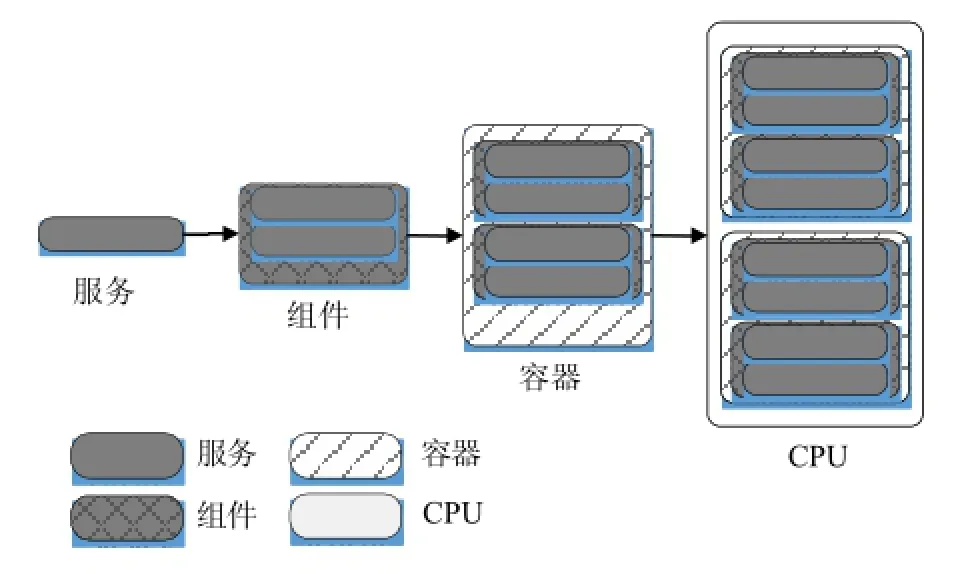
图2 基于组件的分布式异构编程模型Fig.2 Distributed heterogeneous programming model based on components
图2中,SALOME平台采用两层编程模型来实现,分别为SALOME对象和动态软件组件,并且使用CORBA[20]进行组件间通信.本文依赖SALOME平台提供的基础组件,基于动态组件结构重写弓网仿真设计分析平台所需要的功能,构建了几何建模、网格划分、前后处理、求解一体化的仿真设计分析平台.平台集成的关键是开发了模块黏结组件,在开源组件中,有限元的前后处理功能和多体动力学的前后处理功能分开,在弓网仿真中同时使用两者,因此,开发了专门的黏结模块处理动态组件间的功能交叉问题,在黏结模块中借助SALOME平台的内嵌文件管理模式来实现.另外,需要考虑后续功能的扩展问题,在功能平台本身单独设计了插件机制,在后续功能扩展时不需要重新耦合开源组件,只是为平台自身写插件,这样将开源组件和平台本身的模块解耦,在开源组件升级或修改时不影响平台自身功能.
2 数值求解器集成
在弓网系统这种专业细分领域的数值仿真中,研究人员自行求解模型和相应的计算代码,这些数值代码由不同的编程语言(Fortran、C、C++等)实现.为了突破编程语言在模块接口上的限制,解决与现有求解代码(home-made software)的集成问题,研究人员做了许多研究,有效的集成和重用有价值的代码.西班牙的研究人员将这些问题抽象为IPO(input-process-output)模式,应用MVC(model-view-controller)结构开发了JAVA应用框架[19].为了实现大型仿真软件各功能模块解耦,方便已有代码集成和功能扩展,基于组件的软件架构模式在大型仿真平台架构中广泛应用,美国能源部基于组件结构开发了多维多物理核能源建模和仿真程序NEAMS[17],指出基于组件结构可以较好地解决在集成原有代码时所面临的挑战.大型耦合集成核聚变等离子仿真平台也是基于组件框架[21],也有学者为基于组件的软件平台设计了架构模式[22].
遵照NEAMS等系统采用的组件框架原理,借助IPO模式,在仿真设计分析平台中将原有的求解器代码分别进一步抽象为规范的接口,通过编写自动封装程序,将组件描述和IDL接口作为SALOME平台的动态服务组件.这些动态组件可以分布式部署,平台求解器和前后处理求解可以分别部署在不同的计算机上,为平台部署提供更大的灵活性.
3 平台数据集成和互操作性
在高速列车子系统中,弓网系统的受电弓是多体模型,采用多体动力学进行仿真分析.接触网是典型的有限元模型,采用有限元方法分析.因此,在软件平台中有效集成两个学科工具,CAD和CAE数据在底层进行数据交换和重用.虽然CAD和CAE数据的重用和互换对提高整个系统的分析效率和缩短产品开发周期有很重要的作用,但商业软件由于商业竞争,各自数据可互换性较差[23].另外,不同CAD系统数据多采用中性文件格式(IGES,STEP,BREP)和专用接口插件解析两种方式.采用中性文件格式经常导致几何信息丢失,并且精度降低[24],采用专用接口模式除了需要CAD软件厂商授权外,格式文件的升级换代也会带来诸多的不便.相对于CAD数据,CAE数据更具有多样性,结构也更加复杂,目前关于CAE数据的互换性和互操作性研究较少[25].弓网系统设计到有限元分析和多体动力学分析,对CAE数据和CAD数据除了需要互换性以外,还需要有互操作性需求.因此,弓网设计平台需要解决的一个主要问题是CAD数据和CAE数据的互换性和互操作性.
为了减少分析人员CFD分析时处理数据的繁杂工作,对CFD输入输出数据进行标准化.美国波音公司和国家航空航天局(NASA)联合提出了CGNS,CGNS对网格、流场解、区域连接、边界条件和其它辅助信息等都有统一的约定,除了定义标准接口数据结构以外,还提供可扩展的函数库读取数据[26].国内学者采用CGNS标准配合开发了求解器,求解简化系统数据交换[27].
本文以SALOME平台的文件管理系统(HDF)为基础,参照CGNS标准提出了弓网系统几何模型和分析数据的互换性和互操作性策略,开发专用的数据集成引擎,在MED文件系统的支持下实现平台各子系统之间以及平台与外部的CAD和CAE数据交换和互操作.
弓网仿真设计分析平台的数据集成方案如图3所示.

图3 弓网仿真设计分析平台的数据集成方案Fig.3 The data exchange and integration solution for TPL.PC
如图3所示,分析平台自身提供了几何建模和网格生成与编辑功能,考虑到商业软件格式的普遍性,分析平台以中性文件格式支持商业CAD软件格式转换,以Python脚本转换支持CAE分析数据与系统外部商业数据内核进行交换,这样充分考虑了系统的弹性和后续可扩展.以SALOME平台基础功能作为平台集成中枢,在应用层提供弓网平台数据模板定义数据格式,对应CGNS的标准,在引擎层提供弓网平台数据引擎,对应CGNS的可扩展函数库,采用SALOME组件和组件容器进行封装,以动态组件集成到SALOME的CORBA环境中,方便了系统分布式部署和增加系统的弹性.
4 弓网仿真设计分析平台应用实例
考虑弓网仿真设计分析平台的功能完备性以及多体动力学和有限元相结合这一特殊性,分析平台需要提供4个主要功能:三维几何建模与编辑、有限元网格生成与编辑、数值求解器和后处理.
4.1 三维几何建模与编辑
现有的商业软件提供了参数化建模、变量化建模等建模手段和方法,但建立一体化的弓网仿真设计分析平台需要提供自身的几何建模功能,这是平台的基础要求.因此,TPL.PC除了提供通用的建模方法和手段以外,还针对接触网和受电弓的模型特点提供参数化和智能化建模功能.借助SALOME提供的基础功能,TPL.PC可以利用内建的三维几何建模功能生成弓网模型,也支持从外部商业软件中导入的中性文件格式,支持中性文件格式有iges、step等,也可从自行开发文件格式插件程序中导入特定的几何模型.
4.2 有限元网格生成与编辑模块
分析平台基于NETGEN技术,提供丰富的网格划分功能,包括一维网格划分和三维网格划分[28].为了便于几何模型重用,在网格划分时,直接利用几何建模模块导入或绘制的三维模型以及相关参数提供建模和网格划分一体化解决方案.
根据弓网系统仿真的需要,在网格划分时还可以依据跨数、跨距等参数,对划分的单元进行智能编组,以便后续求解器计算,这样省去繁杂的人工操作.为了便于观察网格对应的这个弓网系统的几何位置,可以同时显示几何线框模型和零部件单元网格,如图4所示.
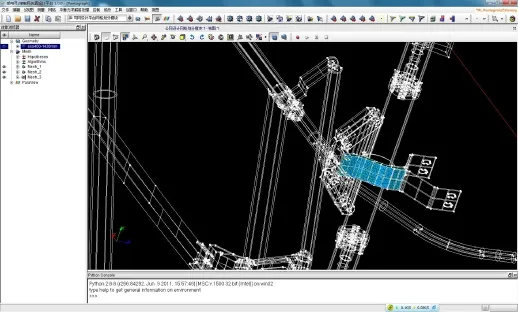
图4 弓网系统线框模型和零部件网格Fig.4 The wire-frame model of pantograph-catenary system and the mesh display of parts
4.3 后处理
现有的商业软件虽然都有较为完善的后处理工具,但对于弓网这种专业程度较高的特定仿真对象,现有的软件都存在一些缺陷或不足,例如,对连续CAE仿真数据三维可视化展示时无交互操作.分析平台后处理模块支持三维动画展示,实时云图数据交互操作,也支持二维图表绘制等基本功能.图5为分析平台后处理模块的应用实例.
利用弓网仿真设计分析平台的后处理功能可重用在几何建模和网格划分模块所建立的模型和网格文件,也可以方便地访问求解结果文件.该系统支持海量数据的并行可视化,同时提供与商业三维可视化软件EnSight的接口,支持立体显示等功能.
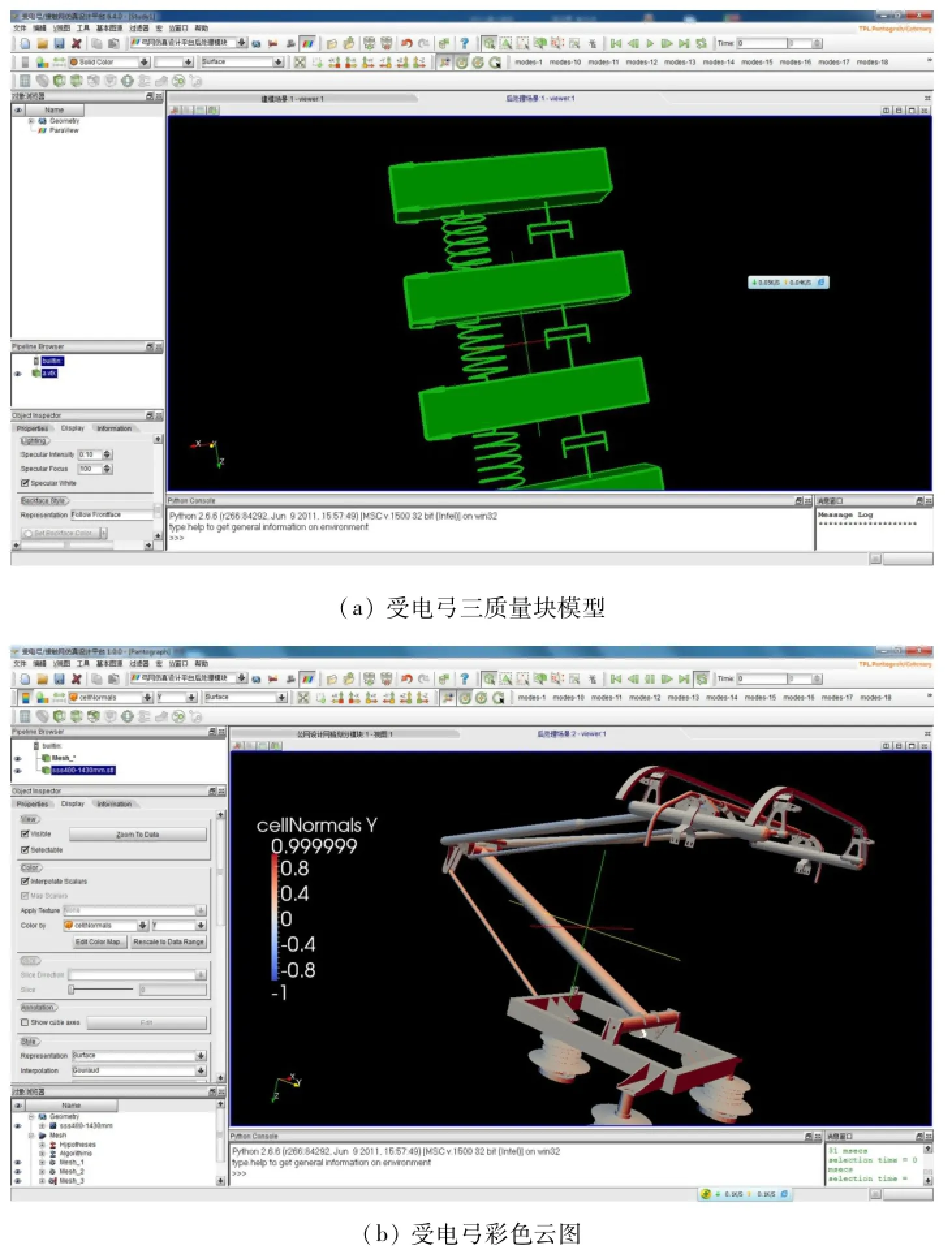
图5 TPL.PC后处理模块Fig.5 The post-processing module of TPL.PC
5 结束语
弓网仿真设计分析平台是一个多体系统软件和有限元软件混合体,本文结合CAD和CAE技术自行研发新的弓网系统虚拟设计、仿真和分析一体化平台,该平台提供完善的前后处理模块.针对行业细分领域自行编制数值仿真代码较多,集成困难的情况,在现有的数值代码集成和部署模型基础上,给出了弓网系统有限元和多体动力学数值代码集成方式,基于动态组件的分布式异构编程实现了现有弓网计算数值代码与平台的内嵌集成.鉴于平台底层数值计算需要集成多体动力学和有限元联合仿真,讨论了两种学科的数据交换和互操作问题,给出了解决这两个学科间数据集成和互操作性的引擎架构和处理流程.参照CGNS标准提出了弓网系统几何模型和分析数据的互换性和互操作性策略,该平台克服了利用商业软件底层数据封闭的缺点,为细分行业利用开源扩展弹性架构设计大规模仿真软件提供参考.
分析平台下一步考虑增加和完善以下功能:
(1)动态黏结算法实现弓网系统异构分布式仿真,使受电弓和接触网分别在不同的求解器、计算机上求解,通过黏结算法进行联合仿真,利用该算法对大型仿真任务进行分割,便于仿真任务的部署.
(2)集成基于实时图形渲染的后处理模块,提供拉弧现象、弓网接触细节展示等直观的弓网系统动态后处理功能.
(3)进一步集成计算流体动力学求解代码和流程,为弓网系统多物理场仿真分析提供完善的软件工具和设计平台.
(4)扩展平台模块的基础架构,实现高速列车大系统动力学的线路、车辆等各子平台开发.
致谢:西南交通大学国家重点实验室自主课题资助(2015TPL_T06);西南交通大学百人计划项目资助(2682014BR033).
[1] 沈志云.论我国高速铁路技术创新发展的优势[J].科学通报,2012,57(8):594-599.SHEN Zhiyun.The superiorities in innovatively developing high-speed train technology in China[J].Chinese Science Bulletin,2012,57(8):594-599.
[2] 张卫华,张曙光.高速列车耦合大系统动力学及服役模拟[J].西南交通大学学报,2008,43(2):147-152.ZHANG Weihua,ZHANG Shuguang.Dynamics and service simulation for general coupling system of highspeed trains[J].Journal of Southwest Jiaotong University,2008,43(2):147-152.
[3] 赵飞,刘志刚,韩志伟.随机风场对弓网系统动态性能影响研究[J].铁道学报,2012,34(10):36-42.ZHAO Fei,LIU Zhigang,HAN Zhiwei.Simulation study on influence of stochastic wind field to dynamic behavior of pantograph-catenary system[J].Journal of the China Railway Society,2012,34(10):36-42.
[4] LEE JH,KIM Y G,PAIK JS.Performance evaluation and design optimization using differential evolutionary algorithm of the pantograph for the high-speed train[J].Journal of Mechanical Science and Technology,2012,26(10):3253-3260.
[5] JUNG SP,KIM Y G,PAIK JS,et al.Estimation of dynamic contact force between a pantograph and catenary using the finite element method[J].Journal of Computational and Nonlinear Dynamics,2012,7(10):0410061-1-041006-13.
[6] 张卫华,黄标,梅桂明.基于虚拟样机技术的高速弓网系统研究[J].铁道学报,2005,27(4):30-35.ZHANG Weihua,Huang Biao,MEI Guiming.Study on pantograph-catenary system based on virtual prototyping[J].Journal of the China Railway Society,2005,27(4):30-35.
[7] 梅桂明.受电弓-接触网系统动力学研究[D].成都:西南交通大学,2010.
[8] BOBILLOT A,CLEON L M,COLLINA A,et al.Pantograph-catenary:a high-speed European couple[C]∥Proceedings of the World Congress on Railway Research.Seoul:UIC,2008:1-8.
[9] BECKER K,KONIG A,RESCH U,et al.Cotenaries for high-speed lines:a subject for research[J].ETREisenbahantechnische Rundschau,1995,44(1/2):64-72.
[10] EINBOLD M,DECKART U.Famos-ein programm zur simulation von oberleitungen und stromabnehmer(famos:a program for the simulation of catenaries and pantographs)[J].ZEV+DET Glases Annalen,1996,120(6):239-243.
[11] VEITL A,ARNOLD M.Coupled simulation of multibody systems and elastic structures[C]∥Proceedings of Euromech Colloquium 404 Advances in Computational Multibody Dynamics.Lisbon:[s.n.],1999:635-644.
[12] SONG I,YANG J.A scene graph based visualization method for representing continuous simulation data[J].Computers in Industry,2011,62(10):301-310.
[13] 于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003:1-11.
[14] Open Cascade Company.SALOME platform[EB/OL].[2012-06-11].http://www.salome-platform.org.
[15] BERGEAUD V,LEFEBVRE V.SALOME:a software integration platform for multi-physics[C]∥Pre-Processing and Visualization.Tokyo:[s.n.],2010:21-29.
[16] CHAULIAC C,ARAGONES JM,BESTION D,et al.NURESIM a European simulation platform for nuclear reactor safety:multi-scale and multi-physics calculations,sensitivity and uncertainty analysis[J].Nuclear Engineering and Design,2011,241(9):3416-3426.
[17] JAY JB,WAEL R E,LEE M H,et al.Designing a component-based architecture for the modeling and simulation of nuclear fuels and reactors[C]∥Proceedings of the 2009 Workshop on Component-Based High Performance Computing.New York:ACM,2009:1-4.
[18] NUNIO F,MANIL P.SALOME as a platform formagneto-mechanical simulation[J].IEEE Transactions on Applied Superconductivity,2012,22(3):4904904-4904908.
[19] RIVEROLA F F,GLEZ P D,LOPEZ F H,et al.A JAVA application framework for scientific software development[J].Software Practice and Experience,2012,42(8):1015-1036.
[20] Object Management Group.CORBA:common object request broker architecture[EB/OL].[2012-08-21].http://www.corba.org/.
[21] WAEL R E,DAVID E B,LEE A B,et al.Component framework for coupled integrated fusion plasma simulation[C]∥Component and Framework Technology in High-Performance and Scientific Computing.New York:ACM,2007:93-100..
[22] PARSONS D,RASHID A,TELEA A,et al.An architectural pattern for designing component-based application frameworks[J].Software Practice and Experience,2006,36(2):157-190.
[23] 杨双荣,胡沙,李建军.CAD数据交换与互操作性的研究[J].计算机工程与设计,2010,32(7):1580-1584.YANG Shuangrong,HU Sha,LI Jianjun.CAD data exchange and interoperability[J].Computer Engineering and Design,2010,32(7):1580-1584.
[24] VERGEEST J S M,HORVATH I.Where interoperability ends[C]∥Proceedings of 2001 Computers and Information in Engineering Conference.Pittsburgh:ASME,2001:1-8.
[25] SONG IH,YANG J,JOC H,et al.Development of a lightweight CAE middleware for CAE data exchange[J].International Journal of Computer Integrated Manufacturing,2009,22(9):823-835.
[26] International Steering Committe.CGNS:CFD general notation system[EB/OL].[2012-07-15].http://http://cgns.github.io/.
[27] 雷国东,柳贡民,明平剑,等.CGNS API和FVM在非结构混合网格计算中的应用[J].计算物理,2007,24(3):277-281.LEI Guodong,LIU Gongmin,MING Pingjian,et al.CGNS API and FVM in unstructured hybrid grid computational method[J].Chinese Journal of Computational Physics,2007,24(3):277-281.
[28] JOACHIM S,SABINE Z,ALMEDIN B,et al.NETGEN:automatic mesh generator[EB/OL].[2012-08-23].http://www.hpfem.jku.at/netgen/.
(中文编辑:秦 瑜 英文编辑:兰俊思)
Holistic High-Speed Train Subsystem Simulation Platform Based on CAD/CAE Integration
TANG Zhao, ZHU Yunrui, NIE Yinyu, ZHANG Weihua
(State Key Laboratory of Traction Power,Southwest Jiaotong University,Chengdu 610031,China)
To enable general-purpose commercial multi-body dynamics and finite element software to meet the requirements of simulation and modeling of a high-speed train subsystem,an extensible and flexible framework was set up by utilizing open-source components and the dynamic encapsulating technology.As a case study,a high-speed train pantograph-catenary subsystem simulation platform(TPL.PC)was developed based on this framework.The application result shows that the proposed framework can provide all necessary functions for the high-speed train simulation platform,such as geometric modeling,mesh generation and editing,numerical solution,and 3D real-time visualization.In addition,it can overcome the difficulty of interoperability of geometry models and simulation models in above aspects among different subsystems,which makes the temporal data produced by iterative computation and the result data exchange smoothly.
simulation platform;software architecture;pantograph-catenary system;high-speed train
TPL391.9
A
0258-2724(2016)01-0113-08
10.3969/j.issn.0258-2724.2016.01.017
2013-10-17
国家自然科学基金资助项目(51405402,51475394)
唐兆(1979—),男,助理研究员,博士研究生,研究方向为轨道交通仿真与可视化,E-mail:tangzhao@swjtu.edu.cn
唐兆,朱允瑞,聂隐愚,等.CAD/CAE集成的高速列车子系统仿真分析一体化平台[J].西南交通大学学报,2016,51(1):113-120.
