门架式转向架迫导向机构曲线通过动力学性能
2016-02-09王伯铭陈洪宇李智泽谭鸿愿
王伯铭, 陈洪宇, 李智泽, 谭鸿愿
(西南交通大学机械工程学院,四川成都610031)
门架式转向架迫导向机构曲线通过动力学性能
王伯铭, 陈洪宇, 李智泽, 谭鸿愿
(西南交通大学机械工程学院,四川成都610031)
为了预测安装了迫导向机构的100%ULF(tra low floor)低地板车辆的曲线通过性能,分析了门架式转向架的迫导向机构组成及其导向原理,推导了其导向参数的理论公式,建立了动力学模型,并通过计算机仿真详细分析了迫导向机构对车辆曲线通过性能的影响,对比分析了加装前后车辆的4个曲线通过性能指标.研究结果表明:加装迫导向机构后车辆的一、二位轮组轮轨横向力变化较小,脱轨系数也无明显变化,轮组冲角可以减少0.5°左右,约减少60%,外轮磨耗指数减少量均超过了10 kN·(°);在对加装迫导向机构后的车辆在不同曲线半径下的通过性能进行预测,当曲线半径大于100 m时,曲线通过性能较好,当曲线半径小于10 m时,转向架的各项曲线通过性能指标响应变得较为敏感,总体车辆在迫导向机构的作用下具有较好的小半径曲线通过性能.关键词:门架式转向架;迫导向机构;曲线通过;动力学性能
100%低地板轻轨车辆作为一种造价低、运量又高于普通公交车的新型交通系统,其技术在国外已经较为成熟并广泛应用于发达国家的大城市,受到人们普遍欢迎[1].我国的城市轨道交通起步较晚,随着我国轨道车辆技术的长足发展,开始逐步迈向轨道交通大国行列.
在对低地板轻轨车辆迫导向机构的曲线通过性能分析方面,国内外学者进行了许多研究.
文献[2]设计了一种单轴转向架及其新型径向调整机构,并分析了其曲线通过性能.文献[3]提出采用导向增益、迫导向机构的等效导向刚度以及迫导向机构杆件的等效连接间隙,描述迫导向转向架的动力学性能.文献[4]中提出耦合轮对,并建立了动力学分析模型,评价了其单轴转向架的动力学性能.文献[5]利用曲率计算方法研究了径向转向架主动导向机构,建立了带有主动导向机构的轨道车辆动力学模型,并利用计算机仿真技术计算了各项曲线通过性能指标,得到了使用主动导向机构能够有效提高轨道车辆导向性能的结论.
目前世界上最低地板面高度的100%ULF(ultra low floor)低地板轻轨车辆是由奥地利SGP(Simmering Graz Pauker)公司设计和制造,入口处地板面高度仅为190mm,基本参数如表1所示[6],表中,A′为动力轮组.

表1 ULF基本技术参数Tab.1 Basic technical parameters of the ULF vehicle
ULF车辆采用的门架式径向转向架结构见图1,其牵引电机在转向架外侧垂向布置,二系悬挂倒置,使用了迫导向径向转向架技术、独立旋转车轮技术和单轮组转向架技术,使车辆自重减小,降低了轮轨之间动作用力和运行噪声,改善了曲线通过性能.
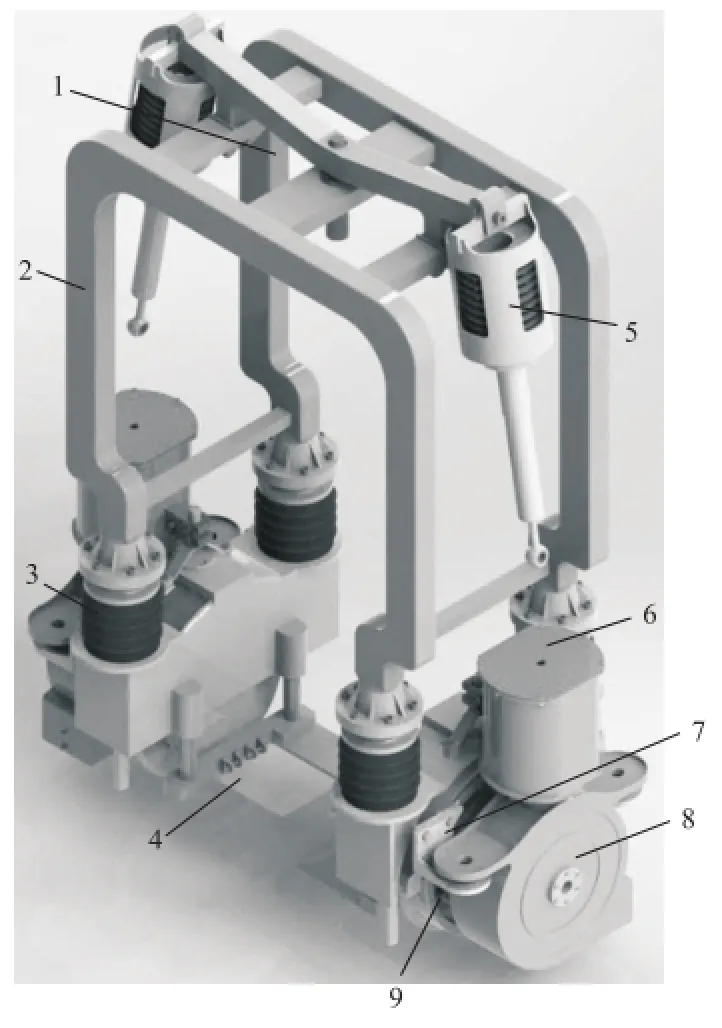
图1 门架式独立旋转单轮组径向动力转向架三维模型Fig.1 3D model of portal radial power bogie with independent rotating wheels
本文研究ULF车辆所采用的门架式转向架及其迫导向机构,分析门架式转向架的结构组成和迫导向机构的导向原理,在推导该迫导向机构导向参数的基础上,建立了ULF车辆的整车动力学模型,利用计算机仿真技术,对比了有无迫导向机构的情况下,ULF车辆的曲线通过性能,并预测了其在不同曲线半径下的曲线通过性能.
1 门架式转向架迫导向机构导向原理
门架式转向架是独立旋转车轮单轮组径向转向架[7],采用多自由度的独立旋转车轮作为轮轨导向系统,左右车轮解耦,理论上不存在纵向蠕滑力所产生的回转力矩,不会产生蛇行运动,使车轮重新获得导向能力.门架式转向架采用了迫导向机构,提高了车辆运行稳定性,减小磨耗和噪声,但其缺乏直线复位和曲线转向能力.为此,通过一套径向调节机构实现车轮的导向和径向调节.
迫导向径向转向架技术通常指[8-9],当车辆在曲线上运行时,利用车体与转向架之间的相对回转位移,通过相应的径向调节机构连接车体和车轮,迫使各转向架车轮向曲线径向位置调整,减小轮对冲角,改善车辆曲线通过性能.
5节编组的门架式转向架轻轨车共有4个门架式转向架,2套径向调节机构,其中车体1和车体2、车体4和车体5是刚性连接的,车体1和车体5为悬臂伸出的司机室,径向调节机构位于车体2和车体3下方.图2为ULF车辆门架式转向架迫导向径向调节机构,通过曲线时,前车车体和中间车体相对回转一定角度,通过对称控制装置带动中间车体转向架车轮径向转动,并通过径向调节连杆机构促使前导转向架径向调节.该径向调节机构主要有3个结构功能模块:
(1)车体摇头角位移传递装置(对称控制装置),通过对称控制装置将相邻车体间的相对摇头角位移传递到跟随转向架的左、右车轮;
(2)径向调节装置,通过径向调节连杆装置将跟随轮组摇头角传递到前导转向架车轮,促使前、后转向架车轮的径向调节;
(3)左、右侧车轮摇头角耦合杆,使同一转向架左、右车轮具有相同的摇头角和横向位移.

图2 ULF车辆门架式转向架迫导向径向调节机构Fig.2 Forced steering mechanism for radial adjusting of the ULF vehicle's portal bogie
2 迫导向机构导向参数
2.1 导向增益
设车辆在过曲线时相邻车体之间的偏转角为α,在迫导向机构作用下推动车轮径向调整角为β,由径向转向架导向增益公式可知[10],理论导向增益为

式中:
2b为转向架轴距;
2L为车辆定距.
由式(1)可以看出,导向增益与曲线半径无关,仅与转向架轴距和车辆定距有关.由单轴独立旋转车轮特点可推导出门架式转向架的导向增益为1,理论上只要迫导向机构与车体之间的导向增益设置合理,即可实现轮对在任意半径曲线上的完全径向调整.
按照门架式径向转向架迫导向机构的设计,迫导向机构车体摇头角位移传递装置(对称控制装置)如图3所示.

图3 导向机构车体摇头角位移传递装置Fig.3 Device to transmit yawing angular rotation of car body in steering mechanism
图3中,铰接点H与车体2连接,铰接点O与车体1连接,车体1与车体2铰接于O′点.通过曲线时,车体1与车体2相对绕点O′的相对摇头角位移为α,在迫导向机构车体摇头角位移传递装置的作用下,可得导向增益为

在实际的设置中,由于迫导向机构由杆件组成,杆件自身是弹性的,且存在安装间隙,实际设计的迫导向机构的导向增益应略大于理论导向增益[11].
2.2 等效导向刚度
对图4所示的迫导向机构的刚度换算到车轮处的等效导向刚度进行公式推导[12].由于导向杠杆COD及三角形对称装置GAB的刚度比车体拉压杆GH和连接车轮处的轴箱拉杆刚度大得多,故可将导向杠杆和三角对称控制装置看成是刚性的,而车体拉压杆和轴箱拉压杆为弹性,其刚度为KGH、KCE、KDF,橡胶关节G、H、C、E、D、F的刚度为KG、KH、KC、KD、KE、KF,如图4所示.
由于机构左右对称,故以图3、4中的1号车轮作为分析对象.设:KG、KH、KGH的串联刚度为K1,
KC、KE、KCE的串联刚度为K2,车体推动车体拉压杆GH的位移为x1,相应的车体拉压杆GH的弹性变形量为x2.由此可计算得到点G、C所受力为

由于L1=L3,CE和OD拉压杆的等效刚度相等,拉压杆的变形量相同,因此有

对O点取矩,可得

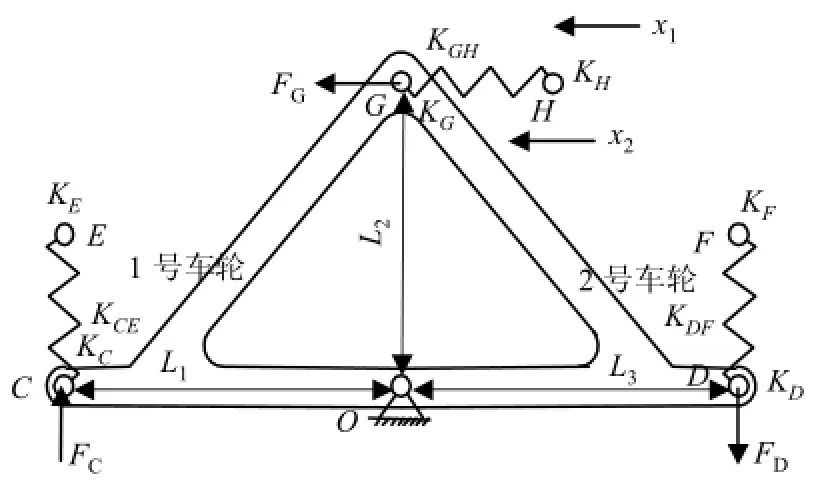
图4 导向机构导向刚度的等效处理Fig.4 Equivalent processing on steering stiffness
将导向刚度进一步等效到车轮处的轴箱拉杆上,此时,GH为刚性连接,等效导向刚度(Kef1)为

由式(3)~(6),可得

故由式(4)、(6)、(7)可得等效导向刚度为

2.3 等效导向间隙
以1号车轮为例,求解迫导向机构的等效导向间隙.设各橡胶关节的连接间隙为gc、gE、gG、gH,铰接点O处的销套连接间隙为g0,调节杆螺纹间隙gL,则等效导向间隙表达式为

3 曲线通过动力学仿真
加装迫导向机构后的整车动力学模型如图5所示.由于车体间采用了铰接式结构,因而在进行动力学分析时必须建立整车的动力学模型,即车体2与车体3、车体3与车体4在两车间的地板面处相互铰接,得到了4个垂向承载点.车体1与车体2刚性固结,除了车体3的铰接点以外,一位轮组的转向架二系也提供了两个垂向承载点,使车体1与车体2有3个点支撑.车体3除了前后车体的铰接以外,转向架2和转向架3的二系分别提供了2个垂向承载点,保证了车体3的四点支撑,车体4与车体5的悬挂方式与车体1、2对称布置.
在动力学仿真模型中,一系悬挂水平和垂直方向分别使用线性弹簧和减振器并联模拟实际的橡胶堆弹簧.二系悬挂可以在顶部安装点绕横向轴回转的线性弹簧和减振器,并联模拟实际的组合弹性元件.
本文分析了有迫导向机构和无迫导向机构时车辆的曲线通过性能,并对加装迫导向机构后的车辆曲线通过性能进行了预测.
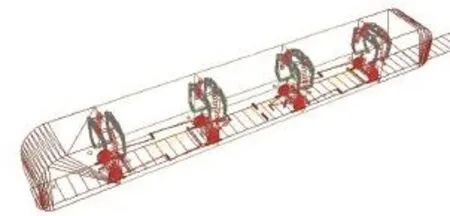
图5 加装迫导向机构后的整车动力学模型Fig.5 Vehicle dynamic model with a forced steering mechanism installed
3.1 迫导向机构对车辆曲线通过性能的影响
对门架式径向转向架有迫导向机构和无迫导向机构时的曲线通过性能进行分析,主要考察4个主要性能指标:轮轨横向力、脱轨系数、轮组冲角和轮轨磨耗.取运行速度v=25 km/h,线路长度由20 m直线+40 m缓和曲线+40 m曲线半径为100 m的圆曲线+40 m缓和曲线+20 m直线组成.
门架式径向转向架同时具备独立旋转车轮转向架、径向转向架和单轴转向架的结构特点,在没有加装迫导向机构时,门架式独立旋转单轮组径向转向架也具备较好的曲线通过性能,在小曲线半径下也能较为平顺的通过曲线[13-14].以一位轮组和二位轮组为例,比较曲线通过外侧轮轨横向力,如图6所示,图中:有-RW1、有-RW2分别为有迫导向机构的一位轮组和二位轮组;无-RW1、无-RW2分别为无迫导向机构的一位轮组和二位轮组.
由图6可知,当车辆开始进入缓和曲线时,前导轮组(一位轮组)开始贴靠钢轨,通过轮缘接触实现导向,其轮轨横向力达到最大值;随着二位轮组继续进入缓和曲线,其相继通过轮缘接触实现导向,轮轨横向力也达到最大值.
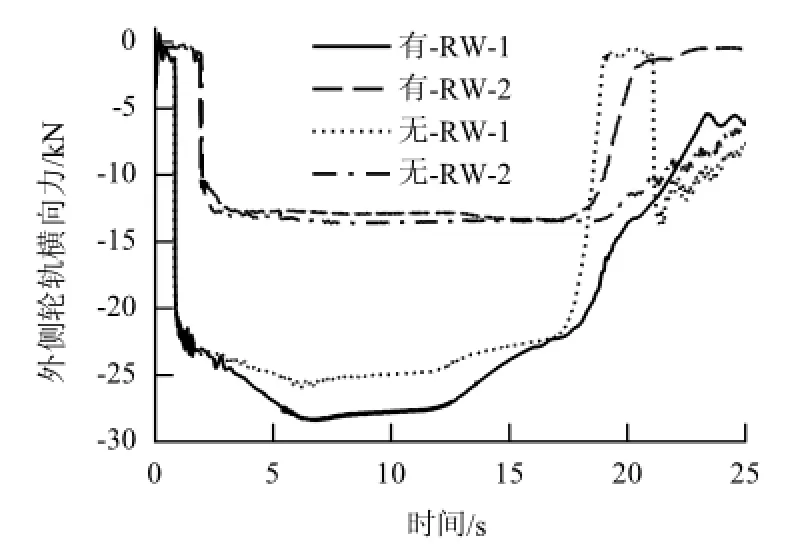
图6 曲线通过外侧轮轨横向力比较Fig.6 Comparison of outside wheel-rail lateral forces
由于门架式径向转向架采用独立旋转车轮,其本身缺乏纵向濡滑力而不具备自动导向的能力,只能依靠轮缘接触实现导向[15],所以,在刚进入曲线时,轮轨横向力急剧增大,但由于采用了径向转向架,轮轨横向力增长速度相继放缓并达到最大值,说明轮组进行了一定程度的径向调节.加装了迫导向机构后,当一位轮组进入缓和曲线,前车车体和中间车体开始相对回转一定角度,迫导向机构开始起作用,通过径向调节装置实现前后轮组径向调节,由于机构反应灵敏,在通过100 m半径曲线时,迫导向机构在2 s内即可完成车轮的径向调节,因此,轮轨横向力在短时间内急剧增大到最大值,基本上不存在太大的时间滞后.
由图6、7可知,与未加装迫导向机构相比,加装迫导向机构后,一、二位轮组轮轨横向力变化不大,轮组冲角可以减少0.5°左右,约减少60%.
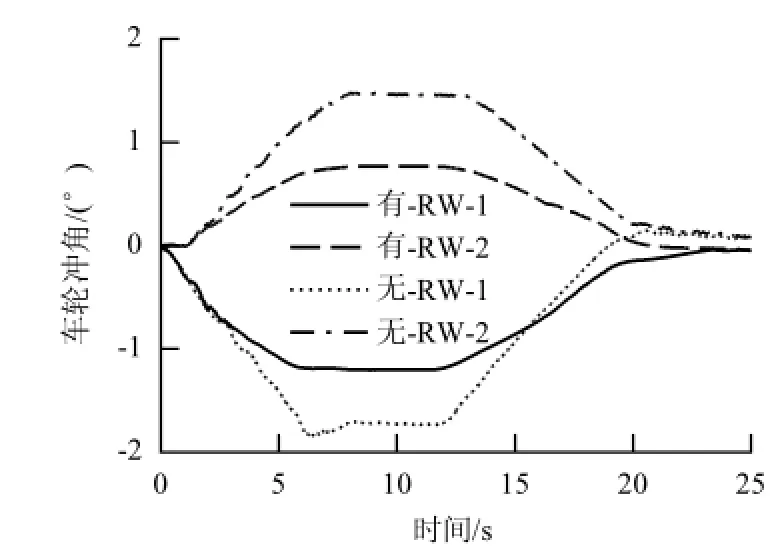
图7 曲线通过车轮冲角比较Fig.7 Comparison of attack angle of wheel pairs in curve passing
由于迫导向机构对轮轨横向受力情况影响不大,有迫导向机构和无迫导向机构对脱轨系数影响很小,各轮组脱轨系数最大值均在0.45左右波动(图8),均在安全范围以内.

图8 曲线通过脱轨系数比较Fig.8 Comparison of derailment coefficient in curve passing
由图9可知,无论是否有迫导向机构,一位轮组的磨耗大于二位轮组,这是由于转向架通过小半径曲线时,前导轮组通常会横移到纯滚线外侧而产生较大的轮缘磨耗,后轮组则横移到纯滚线内侧从而避免了轮缘磨耗.轮缘磨耗以磨耗指数计算,磨耗指数为轮轨横向力和轮组冲角的乘积(kN·(°)).对比加装迫导向机构前后的外轮磨耗指数,可以发现外轮磨耗降低效果明显,一、二位轮组均减少了超过10 kN·(°),改善了整车的磨耗性能.

图9 曲线通过外轮磨耗指数比较Fig.9 Comparison of abrasion index of lateral wheels
3.2 加装迫导向机构后曲线通过性能预测
在不同曲线半径上,对门架式径向转向架加装迫导向机构后的曲线通过性能进行探讨,分别取5种典型的曲线工况,如表2.
由图10可知,各轮组轮轨横向力最大值随着曲线半径的增大呈现出不同程度的下降,且各轮组外侧轮的最大轮轨横向力差距也逐渐减小,说明其曲线通过性能越来越好.
由图10还可知,轮轨间横向力的大小与迫导向机构的设置无关,因而各轮组的轮轨间横向力主要由其在整个车组的前后位置决定.不同曲线半径上一、四位轮组横向力总体上大于二、三位轮组,且呈现出较为对称的分布,这主要是由于车辆编组和迫导向机构是以中间车体为轴对称安装所致.曲线半径50 m时,一、三位轮组的横向力较大,原因是二者分别是前后两个迫导向机构单元的导向轮组.

表2 曲线工况Tab.2 Cases on curves

图10 不同半径曲线下轮组外侧轮最大轮轨横向力Fig.10 The largest lateral force between wheel and rail on curves with different radiuses
由图11可知,轮组冲角随着曲线半径的增大下降趋势明显,曲线半径大于100 m后,轮组冲角维持在较低水平,有利于降低轮缘磨耗和车辆运行安全.三、四位轮组冲角大于一、二位轮组冲角,这主要是因为迫导向机构是依靠车体间相对转角进行车轮径向调节.以100 m曲线半径下各节车体的摇头角为例进行分析(图12).
由图12可以看到,车体2与车体3的摇头角在曲线段上相差很大,此时相对转角控制的迫导向机构作用良好;车体3与车体4的摇头角曲线则几乎重合,即此时车体3的迫导向机构基本不发挥作用,三、四位轮组没有实现径向调整,导致其冲角较大.随着曲线半径的增大,各轮组的车轮组冲角越来越小.
由图13可知,磨耗指数的变化是横向力和轮组冲角曲线趋势的结合.磨耗主要集中在一、三、四位轮组,这主要是由于一位轮组横向力较大,三、四位轮组冲角较大的缘故,曲线半径为50 m时,其磨耗指数明显偏大,轮缘磨耗严重;但当曲线半径大于100 m时,其各轮组磨耗状况得到显著改善,磨耗大大降低,且越发均匀,由此可以看出,当曲线半径小于100 m时,曲线半径对车辆曲线通过性能影响较为明显,但总体看,车辆在迫导向机构的作用下具有较好的小半径曲线通过性能.

图11 不同半径曲线下轮组最大冲角Fig.11 The largest attack angles of wheel pairs on curves with different radiuses
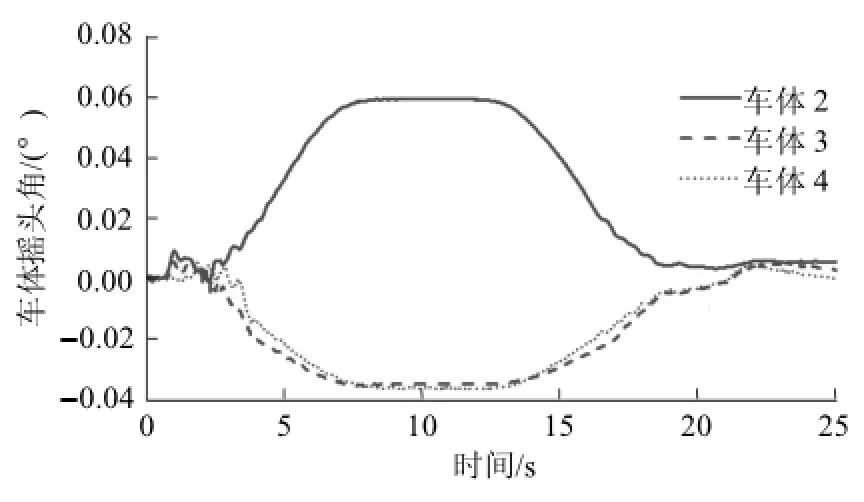
图12 100 m曲线半径下各节车体的摇头角Fig.12 Yawing angles of different car bodies on curve with a radius of 100 m

图13 不同半径曲线下轮组最大磨耗指数Fig.13 The largest abrasion indexes on curves with different radiuses
4 结 论
(1)本文分析的迫导向机构采取迫导向设计,实际导向增益大于理论导向增益,导向刚度和导向间隙对车辆曲线通过动力学影响明显.
(2)迫导向机构可有效地减小轮组冲角和磨耗指数,对提高车辆整车磨耗性能和运行安全性方面有明显作用,有利于减小车辆运行噪音和能量消耗.
(3)迫导向机构径向调节装置动作灵敏,能在短时间内快速完成车轮的径向调节,能较好的适应复杂的曲线环境.
(4)迫导向机构对车轮径向调节作用明显,但在车轮对中方面并不能起到作用,要使转向架获得对中能力需有赖于进一步采用主动控制技术将两侧独立旋转车轮柔性耦合.
(5)本文分析的迫导向机构是由车体间的相对转角驱动控制,在曲线上车体2、3的相对转角较大,因而前迫导向机构的作用更加明显,一、二位轮组的性能指标差别较大;车体3、4的相对转角较小,三、四位轮组的调节效果较差,其曲线通过的性能指标也相对较差.
(6)在曲线半径大于100 m时,转向架具有较好的曲线通过性能,当曲线半径小于100 m时,转向架的各项曲线通过性能指标响应变得更为敏感.
致谢:西南交通大学牵引动力国家重点实验室基金项目资助(J0220602041202).
[1] 王伯铭.城市轨道交通车辆总体及转向架[M].成都:西南交通大学出版社,2013:3-13.
[2] POLACH O.Coup led single-axle running gears:a new radial steering design[J].Journal of Rail and Rapid Transit,2002,216(F3):197-206.
[3] 刘宏友,曾京,李文学.迫导向转向架导向机构参数对动力学性能的影响[J].铁道车辆,2002,40(7):1-4,19.LIU Hongyou,ZENG Jing,LI Wenxue.Effect of parameters of steering mechanism of forced steering bogies on dynamic performance[J].Rolling Stock,2002,40(7):1-4,19.
[4] WU Xingwen,CHIMaoru,ZENG Jing,et al.Analysis of steering performance of differential coupling wheelset[J].Journal of Modern Transportation,2014,22(2):65-75.
[5] SIM K S,HUR H M,SONG H S,et al.Study of the active radial steering of a railway vehicle using the curvature measuring method[J].Journal of Mechanical Science and Technology,2014,28(11):4583-4591.
[6] 王欢,戴焕云,池茂儒.国外100%低地板轻轨车动力转向架纵览[J].内燃机车,2007(12):1-6.WANG Huan,DAI Huanyun,CHI Maoru.Motor bogie of foreign LRV with all-low floor[J].Diesel Locomotive,2007(12):1-6.
[7] 曲文强.门架式独立旋转单轮组径向动力转向架研究[D].成都:西南交通大学,2010.
[8] 毛家驯,严隽耄,沈志云.迫导向转向架的原理及应用(上)[J].铁道车辆,1985(11):22-27.
[9] 毛家驯,严隽耄,沈志云.迫导向转向架的原理及应用(下)[J].铁道车辆,1985(12):5-8.
[10] 李芾,傅茂海,黄运华.车辆径向转向架发展及其动力学特性[J].交通运输工程学报,2003,3(1):1-6.LI Fu,FU Maohai,HUANG Yunhua.Development and dynamic characteristics of radial bogies[J].Journal of Traffic and Transportation Engineering,2003,3(1):1-6.
[11] 刘宏友,李莉,李文学.杠杆式迫导向转向架动力学性能研究[J].中国铁道科学,2002,23(3):37-44.LIU Hongyou,LI Li,LI Wenxue.Dynamics performance of radial bogie with forced-steering levers[J].China Railway Science,2002,23(3):37-44.
[12] 严隽耄.车辆工程[M].北京:中国铁道出版社,1999:134-139.
[13] 李欢.耦合式单轴转向架车辆动力学性能研究[D].成都:西南交通大学,2012.
[14] 倪平涛.无公共轴独立旋转车轮车辆动力学研究[D].成都:西南交通大学,2004.
[15] SHIRO K.The dynamics of guided independently rotating wheel trucks[J].Japanese National Researeh,1981,22(1):19-25.
(中文编辑:秦 瑜 英文编辑:兰俊思)
Curve-Passing Dynamic Performance of Portal Bogie with Forced Steering Mechanism
WANG Boming, CHEN Hongyu, LI Zhize, TAN Hongyuan
(School of Mechanical Engineering,Southwest Jiaotong University,Chengdu 610031,China)
In order to predict the curve-passing dynamic performance of ultra-low-floor(ULF)trams,the configuration of the forced steering mechanism and its working principles were analyzed,theoretical formulas of related steering parameters were derived,and a curve-passing dynamic model was built.By using computer simulation,the influences of the forced steering mechanism on vehicles'curve-passing dynamic performance were assessed,and a comparison on four curve-passing dynamic indexes was made between vehicles with and without forced steering mechanism.As a result,the wheel-rail lateral force and the derailment coefficient in the two cases showed no difference,but the angle of attack of the vehicle with the forced steering mechanism was reduced by nearly 60%(about 0.5°),and the wheel-rail wear coefficient of wheel pairs in positions No.1 and No.2 was reduced more than 10 kN·(°).In addition,the curve-passing performance of vehicles were predicted in different curve radiuses.It was found that when the curve radius was over 100 m,the vehicles showed good curv-passing dynamic performance;and when the curve radius was less than 100 m,the response of curve-passing dynamic indexes became sensitive.On the whole the vehicles with a forced steering mechanism have good small radius curve-passing performance.
portal bogie;forced steering mechanism;curve passing;dynamic performance
U270.2
A
0258-2724(2016)01-0091-07
10.3969/j.issn.0258-2724.2016.01.014
2013-08-09
王伯铭(1962—),男,副教授,硕士,研究方向为机车车辆结构设计与动力学,E-mail:bill_starplus@aliyun.com
王伯铭,陈洪宇,李智泽,等.门架式转向架迫导向机构曲线通过动力学性能[J].西南交通大学学报,2016,51(1):91-97.
