基于Lifemod仿真的鞍马全旋多体动力学模型研究
2016-02-05苏杨
苏杨
基于Lifemod仿真的鞍马全旋多体动力学模型研究
苏杨
鞍马是我国男子体操的传统优势项目,鞍马全旋(DLC)是该项目的典型和核心动作,也是规则规定必须完成的“规定动作”。运动员要在鞍马全旋上达到高水平,不仅训练周期很长,还要不断地纠错、枯燥地重复“规定动作”以及克服伤病干扰,以实现肌肉工作时的协同效应和“自动化”。从运动生物力学的角度对鞍马全旋动作的肌肉工作机制进行定量描述尚无报道。采用多体系统动力学仿真软件Lifemod对该动作进行建模仿真,验证了重心和足在水平面基本作圆周运动是其良好技术水平的体现;并首次揭示了背阔肌在鞍马全旋运动中是主要的动力来源,胸大肌在进行躯干远固定的同时,肱二头肌和肱三头肌协同工作起到支撑作用;三角肌起固定肩关节作用。为精细和准确的训练提供了可定量化的初步依据。
鞍马全旋;多体动力学模型;Lifemod仿真
1. 前言
“鞍马全旋”是男子体操竞技的“王牌动作”,不仅出现在鞍马项目的比赛中,还出现在自由体操、技巧等平面场地的比赛中,其动作变种正日益广泛地被应用于各种身体艺术表演之中(如空中瑜伽、钢管舞、啦啦操等)。查阅1980年代以来的体育科技文献发现,这样一个具有高冲击力视觉效果、被广泛应用的“体操招牌动作”至今尚没有得到精细的定量描述,其技能学习和训练的过程依然处于“暗箱摸索”的状态。近年来,多体系统动力学理论的不断发展,为复杂系统的机构设计、分析,以及优化提供了有力支持,也为体育运动技术的研究开辟了新的途径[1]。随着多体系统动力学理论的发展和计算机的普及,通过建立多体动力学模型进行人体动态模拟方法越来越多地运用于体操、跳水等技术性竞技项目的研究和训练实践。Spägele等(1999) 为了进一步模拟仿真人体跳跃运动建立了人体前臂的多体动力学模型[2]。Wilson 等(2007)为一名优秀男跳高运动员量身定做了8环节多刚体模型,并计算其中5个关节处的屈伸力矩[3]。目前国内外较为先进的针对人体运动建模仿真的软件是多体动力学数字仿真软件Lifemod。Lifemod是在 MSC.ADAMS (机械系统动力学仿真分析软件)基础上进行的二次开发,用以研究人体生物力学特征的数字仿真软件。宋红方、张绪树等曾运用ADAMS 仿真软件建立上肢的运动模型[4]。以上人体运动的多体系统动力学的建模研究,其人体模型动力控制和计算只能量化到关节力矩,达不到肌肉力量层面。Lifemod作为一种新兴的方法已逐渐应用于不同的研究领域。在过去的研究中,虽有一小部分涉及鞍马全旋动作(Baudry et al.2006)[5],但本研究以多体动力学数字仿真软件Lifemod为平台直观的建立鞍马全旋动作的人体骨骼肌肉模型,不仅可以更深入、更经济、更准确地把握鞍马全旋动作中动力学的问题,而且可以获取肌肉力量等以往任何其他模型所达不到的层次。
2. 研究对象
本研究属于“新方法应用的可行性及其应用后指导实践的价值潜力的探索性研究”,故不能进行大样本的测试。以一名江苏省体操队现役运动健将为测试对象,训练年限16y,年龄20y,身高162cm,体重57kg。
3. 研究设备
首先使用美国Motion Analysis红外动作捕捉系统硬件设备和相应的软件workstation 5.0进行运动动作资料采集;其次使用多体动力学数字仿真软件Lifemod建构人体模型。
4. 研究方法和步骤
本研究流程主要是:
4.1 为硬体校正:静态校正(定义空间坐标系统)、动态校正(定义摄影机在空间坐标的位置);
4.2 将受试者贴上反光球,见图1;
4.3 电脑模拟,见图2。
其模拟流程第一步骤利用Lifemod的功能,将受试者基本参数输入构建人体模型;
第二步创建运动引导点并导入运动捕捉的数据(motion capture data);
第三步进行平衡分析,使仿真分析过程中运动引导点固定能够在初始位置上;
第四步进行反向动力学分析,模型在运动引导点的控制下运动,运动引导点的运动是动作捕捉数据或者用户输入的曲线数据。关节会先记录下模型在运动引导点的控制下运动时关节角度的变化情况 (或者肌肉的长度变化过程被记录下来);
第五步进行正向动力学分析,肌肉按照记录下的肌肉长度变化过程作为主动激励角色去驱动运动,使模型再次执行该动作;
第六步,模拟结束后将运动员在做鞍马全旋运动中的运动学参数和动力学参数用图表的形式展示。

图1 lifemod中反光球(marker点)位置图

图2 lifemod模拟仿真流程图
5. 结果与分析
5.1 重心位置变化分析
图3是人体模型进行仿真后重心位置在各方向的变化曲线图,X方向为人体矢状轴方向,Y方向为人体冠状轴方向,Z方向为人体垂直轴方向。由此可计算重心轨迹在各方向上的投影直径,见表1。
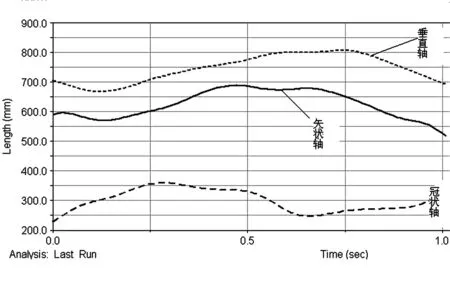
图3 lifemod模型仿真重心位置在各方向的变化图

冠状轴方向矢状轴方向垂直轴方向Lifemod模型0.130.140.17
5.2 足位置变化分析

图4 lifemod模型仿真足位置在各方向的变化图
图4是人体模型进行仿真后重心位置在各方向的变化曲线图,X方向为人体矢状轴方向,Y方向为人体冠状轴方向,Z方向为人体垂直轴方向。由此可计算重心轨迹在各方向上的投影直径,见表2。

表2 足轨迹投影在各方向的投影直径 (m)
综合比较表1,表2可见:无论是重心轨迹还是足轨迹,其在冠状轴方向和矢状轴方向的投影直径均差距较小。说明重心和足在水平面基本作圆周运动,验证了刘延柱老师描述的鞍马全旋的理想运动[12]。进一步证明了在鞍马全旋中重心和足轨迹投影到水平面的曲线越接近圆,动作技术水平越高,这是影响动作好坏的重要因素。
5.3 各骨骼肌肌张力总体趋势分析
图5是模型在鞍马全旋一周后所得左侧骨骼肌肌张力变化曲线图。图6是模型在鞍马全旋一周后所得右侧骨骼肌肌张力变化曲线图。图中4条蓝色竖线分别表示鞍马全旋动作一周的4个阶段的时间分界点(双臂正撑阶段-单臂支撑阶段-双臂反撑阶段-单臂支撑阶段)。由图5可见,左侧肌张力峰值由大到小:肱三头肌>背阔肌>胸大肌>三角肌>肱二头肌。由图6可见,右侧肌张力峰值由大到小:肱三头肌>背阔肌>三角肌(胸大肌)>肱二头肌。

图5 lifemod模型仿真鞍马全旋一周左侧骨骼肌肌张力图
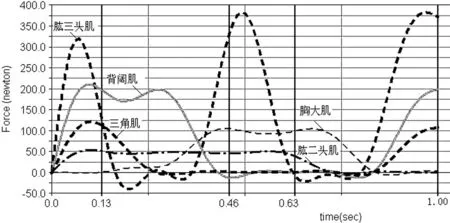
图6 lifemod模型仿真鞍马全旋一周右侧骨骼肌肌张力图
对比两图看出:模型左右肌肉力量对比的趋势基本一致。其中:
5.3.1 左肱三头肌力量最大峰达405.6N,右肱三头肌力量最大峰达382.2N。左右肱三头肌力量峰值均居同侧骨骼肌力量的首位,与本研究第二部分同步实测肌肉数据对比结果一致;
5.3.2 胸大肌和肱二头肌持续发力时间较长。左肱二头肌发力时间为0.32s,右肱二头肌发力时间为0.53s;左胸大肌发力时间为0.49 s,右胸大肌发力时间为0.29 s;
5.3.3 左胸大肌持续发力时间明显长于右胸大肌,与本研究第二部分同步实测肌肉数据对比结果一致;
5.3.4 左右三角肌发力趋势基本一致, T1阶段左三角肌的三个头强烈收缩,其肌肉力量输出百分比达到峰值,主要起到固定肩关节的作用,随后逐渐减弱,到T4阶段又逐渐增大,为下一循环做好准备。
5.3.5 右背阔和肱三头肌在T1、T4阶段明显有发力潜伏期,为进入下一循环的加速阶段作准备。
从两图中可见鞍马全旋一周4个阶段中骨骼肌发力情况:T1阶段双手支撑阶段,主要是肱三头肌、背阔肌、三角肌发力;T2阶段左臂支撑阶段,左胸大肌、右背阔肌、右胸大肌发力;T3阶段双手反撑阶段,左右胸大肌及左右肱二头肌持续发力,同时右肱三再次发力;T4阶段右臂支撑阶段,与第1阶段类似,肱三头肌、背阔肌、三角肌再次发力。
6. 讨论与建议
鞍马全旋运动(DLC)对于提高鞍马项目的稳定性具有决定性意义。由于动作的复杂性,对DLC研究的文献相对稀少。Grassi等研究了DLC中脚踝的轨迹,发现脚和踝关节以近圆形方式移动[6]。Fujihara在水平面研究了质心的运动速度变化[7][8]。在对一般运动员和优秀运动员DLC动作的对比研究中,Baudry等发现足部动作的差异较髋关节和肩关节更显著[9]。之前的研究已经表明,肩、髋关节和脚踝的运动轨迹影响DLC运动的稳定性[6-10]。完成任何一个体操动作都不是一次简单的肌肉作功,需要许多骨骼肌的参与和协调。根据动作的要求,在时间上不同的时段由多组肌肉群收缩与放松交替转换,发力时间长短相接,按照时间上的排列顺序由多组肌肉群协调传递持续作功完成的。控制某些肌肉的最大力量输出的时机,同时保持其他肌群肌力的持续输出是至关重要的。因此,运动员需要了解肌肉收缩和协调的机制。虽然计算机建模和仿真已广泛应用于人体肌肉力量和运动的研究[11],但鞍马DLC运动研究采用的实验方法仍主要局限于运动学。刘延柱从经典力学观点出发,建立人体的理想化多刚体模型分析鞍马上的直体全旋及托马斯全旋的运动规律[12]。本研究探索建立DLC的Lifemod多体动力学粘弹性体模型,重点探究各运动阶段的主要肌肉群的特点,并确定其协同工作机制,这是多刚体模型所达不到的。在Lifemod模型中,肱三头肌和肱二头肌,背阔肌与胸大肌在DLC运动周期中显示拮抗模式。肱三头肌的肌力峰值为所有测试肌肉中输出最高的。胸大肌和肱二头肌力量输出较为平缓,但时间较长。这些结果进一步帮助运动员认识运动规律,并提供肌肉力量训练的具体指导。
在双臂正撑阶段(T1),左臂推,而左肩保持在伸的位置,内旋外展。与此同时,右肩关节内收外旋,并且向下曲推鞍马。肱三头肌、背阔肌和三角肌肌力输出达到第一个峰值。背阔肌积极收缩提供DLC的动力,同时,肱三头肌及肱二头肌协同工作起支撑作用,三角肌发力以稳定肩关节。
在左臂单撑阶段(T2),左肩关节外展内旋,而右肩关节内收积极抓环,以防止由于惯性影响做离心运动。同时胸大肌在整个阶段持续收缩。
在双臂反撑阶段(T3),右肩关节内旋并保持外展,左手及时推马。该模型显示,双侧的胸大肌和肱二头肌呈持续发力状态,右肱三头肌和肱二头肌再次协同工作。
在右臂单撑阶段(T4),右臂外展内旋,而左肩关节内收抓环。该模拟结果表明,肱三头肌、背阔肌和三角肌肌力输出达到第二个峰值。
总之,结合模型可初步推测:背阔肌在鞍马全旋动作的转动过程中是主要的动力来源;胸大肌在进行躯干远固定的同时,肱二头肌和肱三头肌协同工作起到支撑作用;三角肌起固定肩关节作用。
针对该项目不同肌群的工作特点可加强不同类型的肌肉训练,以更加有效的提高肌肉力量和运动能力。国内外已有的研究表明,短期和长期的振动训练可以提高关节肌肉最大力量、快速力量和运动能力[13-15]。常规力量训练中附加全身的振动刺激将更能有效地提高DLC中肱三头肌、背阔肌等的快速力量,并且能够使屈伸肌群的快慢速肌力得到同时协调的发展。除传统的杠铃力量训练法,电刺激力量训练法及等速训练是提高DLC中肱二头肌、胸大肌等肌肉耐力力量的一种高效手段。
7. 总结
综上所述,本研究开创性的建立了鞍马全旋多体动力学Lifemod模型,运用此模型至少可以改进以下训练指导的工作:
7.1 有针对性地纠正DLC训练期间的技术错误,提高训练效率,快速实现运动员鞍马全旋动作的稳定性;
7.2 为创编类似的“支撑性立体化全身动作”提供参照,并有望运用计算机模拟技术实现动作设计、动作诊断和动作改进的数字化;
7.3 lifemod软件是对人体运动进行仿真和模拟运动的一个很好的工具。若能进一步调节肌肉的有关参数和关节的动态精度,对比优秀运动员和一般运动员,进行模型的最优化研究将更有助于探究DLC的运动技术规律;
7.4 运动生物力学的一个重要任务是精确地测量运动技术中的人体关节反力,目前大部分动力学方面的研究仅限于利用测力台来测量地面反作用力,Fujihara设计了测试DLC中马环与手接触的反作用力仪器[8],本研究可进一步通过模型计算人体与马环的接触力,对关节动力学深入研究。这对于DLC等支撑项目的专项动作技术训练具有重要的意义。
[1] 钱竞光. 人体平面运动动作多体系统动力学计算机模拟设计系统软件的研制[J]. 南京体育学院学报, 2006, 5(1): 1-9.
[2] T.Spägele,A.Kistner and A.Gollhofer. Modelling, simulation and optimisation of a human vertical jump[J].J.Biomech., 1999,32(5):521-30.
[3] MA.King,C.Wilson and MR.Yeadon.Evaluation of a torque-driven model of jumping for height [J].J.Appl.Biomech., 2006,22(4):264-74.
[4] 宋红芳,张绪树.人体上肢的ADAMS 建模及仿真[J].医用生物力学,2002,17(4):240-243.
[5] L.Baudry,D.Leroy and D.Chollet.The effect of combined self- and expert-modelling on the performanceof the double leg circle on the pommel horse [J].Journal of Sports Sciences, 2006, 24(10):1055-1063.
[6] Grassi, G., Turci, M., Shirai, Y. F., Lovecchio, N., Sforza, C., and Ferrario, V. F. Body movements on the men's competition mushroom: a three dimensional analysis of circular swings[J]. British Journal of Sports Medicine,2005,39 (8):489-492.
[7] Fujhara, T..Mechanical analysis in mechanism and technique of double leg circles on the pommel horse[J]. Japanese Journal of Biomechanics in Sports and Exercise,2006,10:27-41.
[8] Fujihara, T., Fuchimoto, T., and Gervais, P..Biomechanical analysis of circles on pommel horse[J]. Sports Biomechanics,2009,8 (1):22-38.
[9] Baudry, L., Seifert, L., and Leroy, D..Spatial consistency of circle on the pedagogic pommel horse: influence of expertise[J]. Journal of Strength and Conditioning Research,2008,22 (2):608-613.
[10] Baudry, L., Sforza, C., Leroy, D., Lovecchio, N., Gautier, G., and Thouvarecq, R..Amplitude variables of circle on the pedagogic pommel horse in gymnastics[J]. Journal of Strength and Conditioning Research.,2009,23 (3):705-711.
[11] Cheng, K. B. and Hubbard, M..Optimal compliant-surface jumping: a multi-segment model of springboard standing jumps[J].Journal of Biomechanics,2005,38 (9):1822-1829.
[12] 刘延柱.鞍马全旋运动的动力学[J].力学学报,1985,20(3):243-249.
[13] 曾纪荣,王兴泽.振动训练时发展肌肉力量效果影响的实验研究[J].北京体育大学学报,2007,30(10):1439—1441.
[14] BoSCo c,cARDINALE M,TsARPELAo.Innuence of vibration on mechamcal powerand electromyogram activity in human arm nexor muscles[J].Eur J Appl Physiol occupac Phvsi ol,1999A,79(4):306—311.
[15] ls sURIN VB,LIEBERMANN DG,TENENBAUM G.Effect of vibratorvstimulation training on maximal force and flexibiIity[J].J sportsci,1994,12(6):561—566.
江苏省体操运动员科技攻关的运动生物力学研究(基金项目:BE2008687)。
苏杨(1981.11-),女,江苏常州人,研究方向:体育工程与体育统计,讲师,南京体育学院运动健康科学系。
10.16730/j.cnki.61-1019/g8.2016.02.001
