船模试验数据无线采集系统的实现
2016-01-29王承定郭胜军
王承定, 郭胜军
(中海网络科技股份有限公司,上海 200135)
船模试验数据无线采集系统的实现
王承定,郭胜军
(中海网络科技股份有限公司,上海 200135)
摘要:为开发具有无线通信功能的数据采集系统,以提高船模试验的精度,扩大试验领域,介绍一种通过无线网络通信的数据采集系统。该系统整合并转换船模试验传感器接口,以标准形式接入船载数据采集箱,通过无线网络与岸端数据采集箱进行数据交互。岸端数据采集箱通过以太网接入数据采集计算机,并通过计算机上部署的应用软件,实现船模试验数据的无线采集、存储、在线监测及统计分析等。
关键词:船模试验;传感器;陀螺仪;MIMO技术
0引言
进行船模试验时需要使用多种类型的传感器,且通常需要为其提供工作电源电缆和信号输入/输出线,而这些线缆均连接到岸边的数据采集装置和计算机上。由于参与船模试验的传感器的工作电源有多种规格,且部分传感器有多路信号输出,因此试验时连接到船模上的线缆较多(可多达几十根),试验准备和调试工作量较大,也在一定程度上影响了船模的运动。此外,船模需在自航状态下试验,带有大量电缆线,将无法进行试验。因此,开发具有无线通信功能的数据采集系统对提高试验精度、扩大试验领域而言具有重要作用。
对此,介绍一种通过无线网络通信的数据采集系统。该系统整合船模试验的传感器,以标准接口的形式接入船载数据采集箱,通过无线网络与岸端数据采集箱进行数据交互。岸端数据采集箱通过以太网接入数据采集计算机,并通过计算机上部署的应用软件实现船模试验数据的采集、存储、在线监测及统计分析等。
1系统组成
1.1 系统结构
船模试验数据采集和分析系统由传感器(模拟量和数字化)、现场数据采集箱(船载、岸端)、数据采集和统计分析计算机及其应用软件等部分组成。系统网络拓扑图见图1。
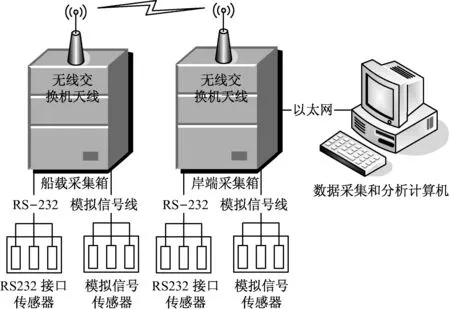
图1 系统网络拓扑图
在设计系统的结构时,考虑过两种网络应用结构:
(1) 船载采集箱中加入前置处理器,以分时轮询的方式对传感器进行数据采集和控制,并仅通过网络上传采集到的数据;
(2) 通过网络透明传输,直接进行数据的采集和控制。
若采用第一种应用结构,MTI陀螺仪的数据交换接口为串口,虽然通过通信转换器转换成了网口,但设备驱动和编程接口还是以串口通信的方式处理。由于陀螺仪数据需要组织和准备,因此进行一次数据采集和传输需花费约8 ms时间。NI(National Instruments)网络接口模拟量输入模块虽然可以用较高的频率采集数据,但因SDK过程调用返回的是封装数据块,并不适合单次采集时间段较长的应用场景。此外,第一种应用结构方案要投入较多的设备购买资金,且嵌入式编程需要花费较多的人力和时间成本。
综上,在系统实现时推荐使用第二种应用结构,即图1所示的系统架构方式。
1.2 系统传感器
1.2.1传感器及其接口
船模试验涉及的传感器按信号输出接口的不同可分成数字化传感器和模拟量传感器两大类。
(1) 数字化传感器的测量结果用数字化格式组织,以RS232电气接口或其他接口通过协议组织成数据包输出。
(2) 模拟量传感器的测量结果以模拟量信号(电流或电压形式)线缆输出。
1.2.2测量类型
目前船模试验所用的测量船舶运动的传感器主要包括:船舶运动测量传感器(如MTI陀螺仪、倾角仪、加速度测量传感器、角速度传感器、位移测量传感器等),试验环境条件测量传感器(如浪高仪、风速仪等)。
1.2.3传感器接入
数据采集箱根据传感器的工作电压规格在其连接插座处提供电源;为具有多个模拟量信号的传感器提供单个连接插座,方便使用;为模拟量传感器输入提供单端连接和差分连接。
1.3 数据采集箱
1.3.1数据采集箱的功能及分类
数据采集箱是为船模试验现场传感器提供工作电源,为传感器模拟量信号接入(电流或电压形式)、数字化传感器通信接口转换及数据传输网络交换路由(含无线AP和天线)等提供统一接口的信号汇集装置。现场数据采集箱分为船载数据采集箱和岸端数据采集箱(见图2、图3)。

图2 船载数据采集箱示意图
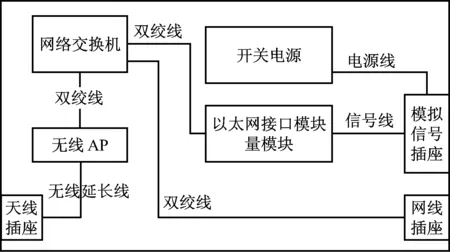
图3 岸端数据采集箱示意图
1.3.2箱内设备
(1) 开关电源:船载数据采集箱配置开关电源,为传感器、通信转换器及交换机等设备提供直流工作电源;开关电源输出有+5 V,±12 V和+24 V等4种规格的直流电源。
(2) 通信转换器:用于与配有RS232通信接口的MTI陀螺仪连接,把MTI陀螺仪串行接口转换成以太网口。
(3) 模拟量输入模块:配置了NI公司的以太网模块连接器和模拟量输入模块,其中模块连接器cDAQ-9184最多可连接4块NI9205模块,模拟量输入模块NI9205具有32通道模拟量输入(±0.2~10 V、16位精度、250 kHz/s采样频率)。
(4) 网络交换机:用于连接串口转换器、NI模块连接器和无线网络接入点(Access Point,AP)。
(5) 无线AP:用于船载数据采集箱与岸端数据采集箱之间实现无线数据交换。
1.3.3数据采集箱接口
(1) 串行设备接入端口:配置了2个连接MTI陀螺仪RS232接口的连接插座,插座上安排了RS232信号线和陀螺仪5 V工作电源引脚。
(2) 模拟量信号接入端口:配置了14路模拟量传感器连接插座,插座上安排了为传感器提供电源(直流+5 V、±12 V和+24 V)的引脚。每个传感器接入插座引脚为8路信号线。
(3) 天线接口:无线AP采用外接天线,外接天线的基座固定在箱体上。
(4) 以太网接口:船载数据采集箱的以太网接口用于在无线通信不能满足要求的情况下使用网线连接;岸端数据采集箱的以太网接口用于连接采集系统计算机。
(5) 电源插座:将UPS或市电引入船载数据采集箱。
1.4 网络数据传输
船模在水池中运动时会受到电源线和网络通信线等线缆的拖曳影响,以致采集系统的测量精度降低。无线网络采集系统把所有传感器的电源线和信号线就地接入船载数据采集箱,船载数据采集箱以无线方式与采集计算机(通过岸端数据采集箱路由)通信,最大程度地降低了线缆对船模试验的影响。
船模在试验过程中因受模拟波浪和风等环境因素的影响而始终处于移动和摇摆状态,系统最初配置的传统无线AP设备在船模运动幅度较大、无线传输不稳定且具有较大的传输延时,无法满足使用需求。经过反复试验,最终选择采用MIMO技术的无线AP,在发射端和接收端分别使用多个发射天线和接收天线,使信号通过这些天线传送和接收,从而提高通信质量。利用MIMO信道提供的空间复用增益及空间分集增益以及多天线来抑制信道衰落。多天线系统的应用使得并行数据流能同时传送,可显著克服信道的衰落,降低误码率。
船载数据采集箱和岸端数据采集箱之间的通信以无线网络优先,同时保留了网线的接口。
1.5 数据采集计算机及其软件
采集计算机及其软件用于实现对船模试验现场传感器的数据采集、存储和统计分析处理。
2系统功能
2.1 任务管理
任务管理的功能之一是为将要进行的船模试验选配所需的传感器资源。在配置传感器资源时,可对传感器进行通信和预采集测试,以检验传感器和系统部件试验准备工作的有效性。
任务管理主要功能包括:任务建立、任务数据导出和任务历史浏览等。
2.2 数据采集
2.2.1采集数据预览
通过采集预览功能,可看到采集任务当前配置的各路传感器的工作状况。当用户认为现场设备到达合适状态时便可启动数据记录。系统缺省的采样数据时间段为1 min,用户可调整采样数据记录时间段采样记录过程。
2.2.2采集数据记录
通过采集数据预览功能,可看到采集任务当前配置的各路传感器的工作状况,当用户认为现场传感器设备到达合适状态时便可启动数据记录。系统缺省的采样数据时间段为1 min,用户可调整采样数据记录时间段。
系统以倒计数的方式显示录制剩余时间(s)。采样记录过程到达预设的时间段时立即终止,用户可随时中断采样记录过程。
2.3 数据管理
2.3.1数据库应用
船模试验系统的数据由系统传感器和采集任务数据、船模试验采集数据两部分组成。其中:系统传感器和采集任务数据存储在SQL Server数据库中;船模试验采集数据以文本文件格式存储在为采集任务建立的文件夹中。
2.3.2历史数据查询
系统保存每个采集任务的传感器配置、采样参数和采集原始数据。系统可按日期反序排列以列表的方式列出采集任务的全部历史,用户可随时查询各采集任务的详细信息。
2.4 数据统计分析
2.4.1统计基准点
船模以相对静止的等待状态准备进入试验时,传感器有1个电气初值,也称校零值(测量的物理零位)。基准点是统计过零处理的参考点。系统为统计分析处理提供了以平均值或校零值为基准点的选择。
2.4.2统计区间调整
统计分析计算默认的样本区间是某批次的所有采集数据。可选择某一传感器数据项作为样本进行查看及调整样本区间。新的样本区间确定后,所有数据项的统计分析计算都将该区间作为参照体。
2.4.3曲线平滑处理
选择某一传感器数据项作为样本进行查看,可调整曲线平滑处理参数(包括平滑次数和平滑点数)。新的平滑处理算法确定后,所有数据项的统计分析计算都将该算法作为参照体。
2.4.4统计分析算法说明
(1) 采样曲线图例见图4。
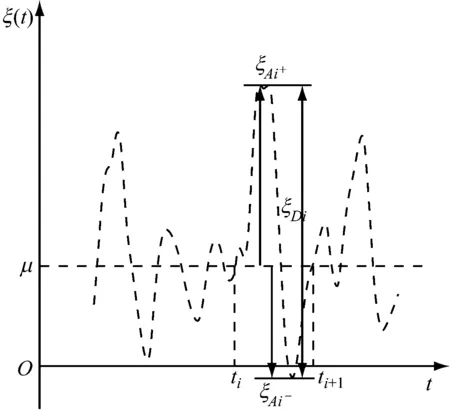
图4 采样曲线图例
(2) 过零周期及峰谷值。

对于t=0→T的整条ξ(t)的时历记录曲线而言,必然会有许多过零周期。若总的过零周期数为M个,则同时也有M个峰值、谷值及双峰值。
(3) 有义值或十一值
对全部M个峰值、谷值和双幅值,按绝对值从大到小按序排列,则1/3数目的最大幅值的平均值即为有义值或三一值;1/10(或1/100)数目的最大幅值的平均值即为十一值(或百一值)。最大单幅值是指单幅值中的最大值;有义单幅值是指1/3最大单幅值的平均值。十一单幅值是指1/10最大单幅值的平均值;最大双幅值是指双幅值中的最大值;有义双幅值是指1/3最大双幅值的平均值;十一双幅值是指1/10最大双幅值的平均值。
3网络性能测试
3.1 测试要求
1) 船载数据采集箱和岸端数据采集箱的无线接入终端均选用垂直极化全向天线,适合于水池中的船模自由运动。
2) 为满足船模试验的功能需求,分别在不同距离、不同天线增益、不同工作频率和不同MIMO无线接入设备等条件下进行了静态和动态测试。
(1) 静态测试:船载数据采集箱处于实验室环境中的静止状态。
(2) 动态测试:船载数据采集箱安装于船模上,船模在试验模拟环境下处于运动状态。
3.2 测试资源配置
1) 传感器及信号处理器:1台MTI陀螺仪;2个NI网络接口模拟量输入模块。
2) 无线设备资源:
(1) 2 dB增益、全向天线、2.4 GHz频段;
(2) 12 dB增益、全向天线、2.4 GHz频段;
(3) 12 dB增益、全向天线、5.8 GHz频段;
(4) 6 dB增益、MIMO终端和天线、5.8 GHz频段(一体化,增益可调)。
为选取满足数据采样要求且性能较好的无线设备配置,在采集系统实施过程中按测试要求对上述无线设备进行了静态和动态测试。
3.3 测试结果比较及分析
测试结果见表1和表2。

表1 静态测试结果

表2 动态测试结果
根据上述测试结果,系统最终选用MIMO技术无线接入终端。该设备可在2.4 GHz和5.8 GHz频段工作,支持IEEE802.11b/g/n标准,可选 AP/Bridge/AP Clien和WDS工作模式。选用5.8 GHz频段是为了避免众多的WIFI信号干扰。
从测试报告中可看出,系统的网络通信测试工作经历了在不同距离下使用不同增益和不同工作频段的全向天线,以及从常规无线AP改换成MIMO无线AP使得最终选配的无线以太网通信设备在性能指标上满足船模试验要求。
4系统特性
4.1 时间相关性
船模试验数据分析的一个特征是关注在某个时刻(时间点)参与试验的各个传感器即时值之间的关联。在统计分析处理时,以某个时刻为参照点,计算出各个传感器所对应的物理量并进行相关性比较。
4.2 基本采样时间
NI网络模拟量输入模块的特点是连接使用方便、传输速度快,可通过设备驱动程序和动态链接库来读取其采集的数据,可设置其数据采样频率、通道类型、通道个数及数据项个数等参数。系统为该模块配置成32通道的单个数据采样和传输方式,其进行一次数据采集大约需要4 ms。
陀螺仪通过串行端口进行运行控制和数据交换,相对于网络接口来说属于低速传输设备,其进行一次数据采集大约需要8 ms。
系统的最小采样周期是选配的NI模拟量输入模块和MTI陀螺仪进行一次数据采集所用时间的总和。
4.3 采样频率
船模试验数据采集常用的采样频率在20~50 Hz(即两次采样的时间间隔为20~50 ms)。经验证,在配置1个陀螺仪和2个NI网络模拟量输入模块的情况下,系统可保证数据采集过程正常的最高极限采样频率为62.5 Hz(即两次采样的时间间隔为14 ms)。
船模试验的典型采样周期为20 ms,按系统目前的配置可满足船模试验的采样频率要求。
4.4 定时精度
船模试验数据采集的时间精度有单次采集的时间间隔和采集总时间精度两方面的要求。
通常使用的编程用定时器的最大定时间隔为60 s,定时间隔可调节的最小单位为1 ms,但因计算机硬
件的兼容性要求,常用的定时器的精度实际上达不到ms级。
系统选用了时间精度为ms级的高性能定时器ccrpTmr编程部件,可保证单次采样的定时精度以及采集总时间的间隔和精度(定时间隔变量为长整型,基本上无使用限制)。
经验证,在采集总时间为3 min的要求下,数据采集的总次数精度为99.95%(实际总次数在(9 000±4)次范围内,计算总次数为9 000次)。
4.5 网络带宽
网络模拟量输入模块(或数字化采集仪)的数据采集是通过动态链接库编程接口进行的,由于接口封装的原因,仅可测量在指定配置参数的条件下进行一次采集数据所用的时间。
进行一次传输的数据包长度为2 K字节(50个单精度实数),在数据采集过程中,按照采样时间20 ms的周期频度向主控程序发送数据包,所需的网络带宽约为100 KB/s,即≤1 Mbit/s。
5结语
采用无线网络结合岸端有线网络的系统构建方式,简化了现场布线,弱化了线缆牵引对船模试验模型的影响,有效遏制了水池试验环境和船模移动对无线通信造成的影响,实现了船模试验数据及时、有效的采集和传输,为船模的实时监测和数据的统计分析打下了坚实的基础。
参考文献:
[1]杨建民,肖飞龙,盛振邦.海洋工程水动力学试验研究[M].上海:上海交通大学出版社,2008.
[2]任立刚,宋梅,郗松楠,等.移动通信中的MIMO技术[J].现代电信技术,2004(1):42-45.

Wireless Data Acquisition System for Ship Model Tests
WangChengding,GuoShengjun
(China Shipping Network Technology Co., Ltd, Shanghai 200135,China)
Abstract:In order to facilitate data communication within the data acquisition system, all sensor signals are digitized and converted into a unified form before they are connected to the ship-side data collection unit, which communicate with the data unit of the base system via a wireless network. The data unit of the base system is connected to a data processing computer via Ethernet network. The processing computer monitors the data on real time basis and stores them for further processing.
Key words:ship model tests; sensor; gyro instrument; MIMO
中图分类号:U665.26;TP274+.2
文献标志码:A
文章编号:1674-5949(2015)04-065-06
作者简介:王承定(1956—),男,上海人,研究员,主要从事系统集成应用软件的开发。
收稿日期:2015-08-12
