DSP在无刷直流电机控制系统中的运用
2016-01-27黄斌
黄 斌
(中船重工750试验场,云南昆明650010)
DSP在无刷直流电机控制系统中的运用
黄斌
(中船重工750试验场,云南昆明650010)
摘要介绍了基于DSP在无刷直流电机控制系统中有位置控制的设计原理和过程,针对在无刷直流电机调速中PID算法存在的问题,采用了非线性变速积分PID算法,成功地应用到设计中,控制技术采用了PWM控制。实验结果表明该控制结构简单,电机起动快、稳定,具有较宽的调速范围,可靠性高,应用前景非常广泛。
关键词无刷直流电动机;PWM;PID算法;DSP
0引言
无刷直流电动机利用电子换向器取代了电刷和机械换向器,因此它不仅保留了直流电动机的优势,而且具有交流电动机的结构简单、运行可靠、维护方便等优点,一经出现就以极快的速度发展和普及[1]。随着电力电子技术的不断发展,单片机的性能得以不断提高,基于TMS320F2812的DSP的控制系统,可实现三相绕组直流无刷电动机控制的智能化控制,并具有成本低、工作稳定、抗干扰能力强、通用性强等特点[2]。
1直流无刷电动机的控制方案
1.1 控制系统的总体设计方案
在系统总体方案设计中,根据功能将系统分为驱动电路、逆变电路、DSP主控电路、显示控制电路、电流检测电路、转子位置检测电路和无刷直流电机七个模块,如图1所示[3]。
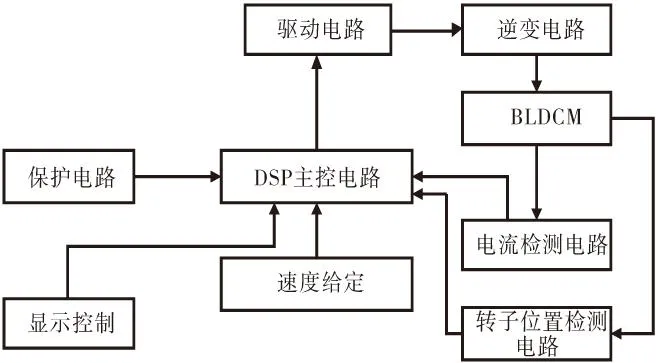
图1 系统总体方案框图
系统的核心是DSP主控电路模块,该模块负责产生驱动电机的波形,与显示模块进行通信,处理由电流检测模块和转子测速模块反馈信号控制电机运行状态,DSP送出的驱动信号通过驱动电路送到逆变电路,以达到驱动电机的目的;转子位置检测电路的作用是把霍尔传感器检测转子位置信号反馈给DSP计算转子的位置,电流检测电路是对电流采样,用于电流环控制回路。
1.2 控制机构
本系统采用电流环和速度环构成的双闭环控制,从闭环结构上看,电流环是内环,转速环是外环。
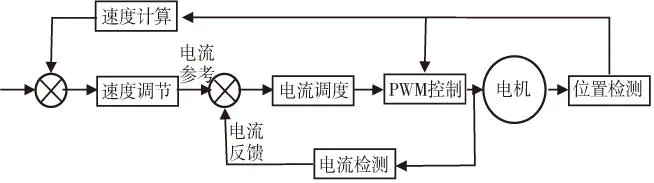
图2 无刷直流电机双闭环控制系统
在双闭环调速系统当中,转速环的作用是对转速抗扰调节并使之在稳态时无静差,其输出的限幅值决定允许的最大电流。电流环的作用是电流跟随,过流保护,及时抑制电压扰动。
系统设计的顺序是先内环后外环,调节器的结构和参数取决于稳态精度和动态校正的要求。具体对双闭环控制系统来说,先设计电流环,然后把整个电流调节环当做转速调节系统中的一个环节,再设计转速环。
2控制策略
2.1 PID算法的选择
控制策略好坏的选择直接关系到控制系统的性能。对于任何控制系统而言,都要求做到稳、准、快。稳是最根本的要求;准是稳态要求(稳态误差要小);快是动态要求(超调量要小,调节时间要短)。无刷直流电机调速系统是一个多变量,强耦合的非线性系统。随着对无刷直流电机控制系统要求的提高,传统的PID控制很难得到令人满意的结果。本文针对传统的PID而言,采用非线性变速PID算法。
变速积分PID是:改变积分项的累加速度,使其与偏差速度相对应;偏差越大,积分越慢,反之越快。为此,可以取非线性函数f[e(k)]。
(1)
这时PID算法可以改进为

KD[e(k)-e(k-1)]
(2)
f的值在0~1之间变化,当偏差大于A+B时,证明此时已经进入饱和区,这是f=0,不再进行积分项的累加;|e(k)|≤A+B,f随偏差的减小而增大,累加速度加快,直至偏差小于B后,累加速度达到最大值1。这种算法对A,B两参数的要求不精确,当A,B两参数的要求不够精确。当A,B值选的越大,变速积分对饱和抑制作用越弱,反之越强。变速积分用比例作用消除了大偏差,用积分作用消除了小偏差,大部分情况下可消除积分饱和现象,同时大大减小了超调量,容易使系统稳定,改善了调节品质,但对于|e(k)|在大范围突然变化时产生的积分饱和现象仍不能很好消除,这时可采用非线性变积分的PID。
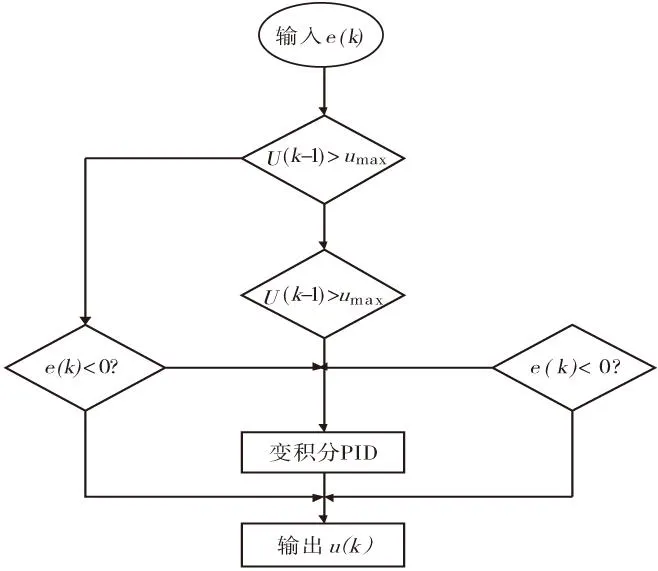
图3 非线性变速积分PID算法程序框图
2.2 控制芯片的选用
控制芯片采用TI公司的TMS320F2812芯片,所实现的软件包括电机状态值的采用与计算、控制算法的实施以及PWM信号的输出,此外还包括故障检测与保护、数据交换与通信功等。
综合考虑本系统对控制芯片的要求和控制芯片自身的性能特点,选择DSP芯片TMS320F2812作为无刷直流电机控制器的控制芯片。
2.3 控制方法
对于星行连接的三相无刷直流电机,在理想情况下,任何时刻只有两相定子绕组导电。令加在两相通电绕组上的平均电压为Vd,则电压平衡方程式
Vd=2Em+ImR=2keφmn+ImR
(3)
(4)
式中,Em—各相反电动势;Im—各相相电流;n—无刷直流电机转速;R—回路等效电阻,包括电机两相电阻。由式(4)可知,无刷直流电机的转速通过改变外施平均电压Vd来实现[4]。
改变电枢电压是直流调速的主要方法,本系统采用PWN(脉宽调制)调速方法,通过调节逆变器的PWM触发信号的占空比来改变外施的平均电压Vd,从而实现无刷直流电机的调速方法。
在一般情况下,采用单极性PWM控制的电流波动最大值只有采用双极性PWM控制的电流波动最大值的一半,因此为了减小电流脉动和功率管的开关损耗,本电机控制系统采用单极性的PWM控制技术[5]。
3控制系统软件实现
无刷直流电动机控制系统软件设计要求根据获得的电机转速的设定值,以及从传感器信号测得的电机时实转速,用非线性变积分方法PID算法计算出电机的转速控制量,从而调节电机的转速,使电机的转速跟随电机转速的设定值[6]。根据转速的控制量和电机实时转速,依照控制算法算出PWM的占空比,更新定时器的设定值,从而形成PWM信号调节电机转速。控制软件分为主程序和中断服务子程序两大部分。其中主程序包括初始化子程序、启动子程序等,中断服务子程序主要有捕获中断子程序、换向子程序、A/D中断子程序、功率保护中断、双闭环PID调节子程序等具体见图4、图5、图6。
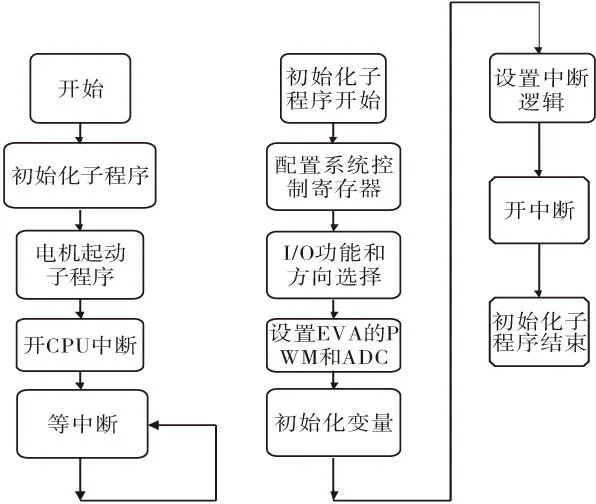
图4 主程序框图
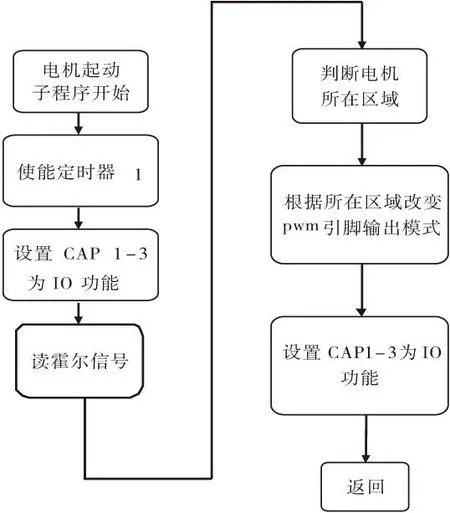
图5 电机起动子程序框图
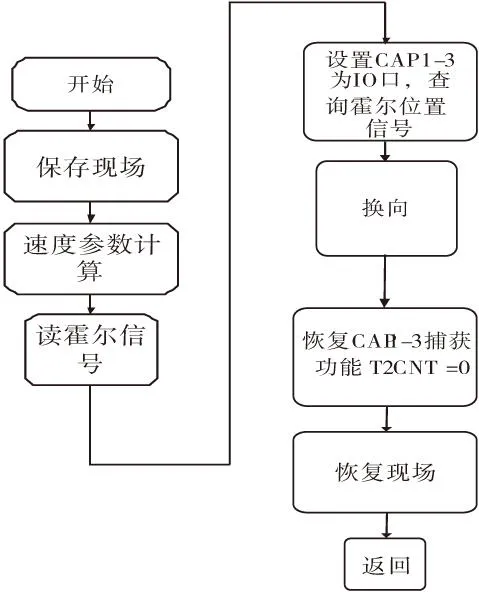
图6 捕获中断子程序
4实验结果及分析
通过磁粉制动器对电机进行加载,可以得到调整负载时的速度波形和负载波形见图7、图8。
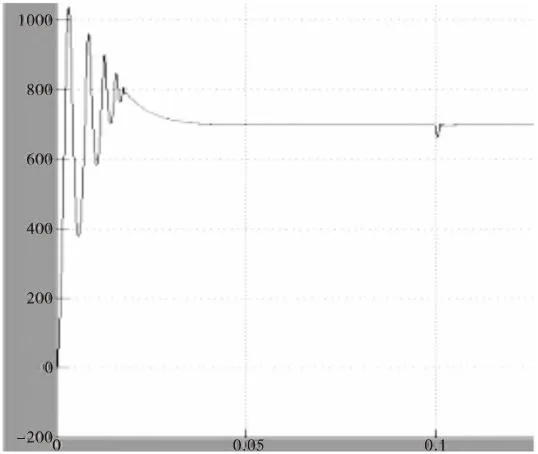
图7 调整负载时电机的速度波形
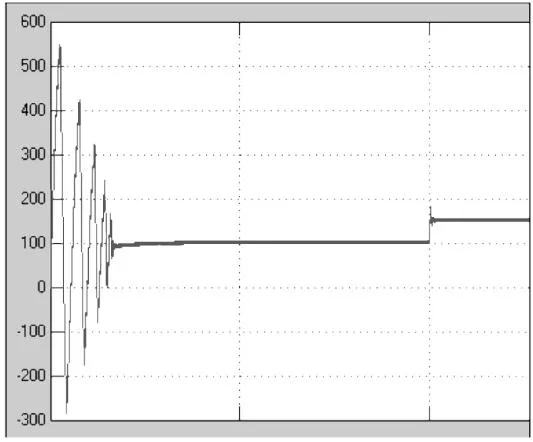
图8 调整负载时电机的负载波形
从转矩波动图可得到,系统不受负载转矩波动的影响,在给定的转速下运行并伴有小幅度的振动。由上面实验结果可知,所设计的系统具有较好的速度响应性能,实验表明电机在起动和调速过程正常,整个运行过程正常。
本文针对无刷直流电机设计了一套控制系统,采用C语言完成了控制算法的实现,通过对实验结果分析,验证了控制算法的先进性和电机控制的可行性。
参考文献
[1]郑吉,王学普.无刷直流电机综述[J].微特电机,2002,(3):11-13.
[2]张琛.直流无刷电机原理及应用[M].北京:机械工业出版社,1996.
[3]韩安太,刘峙飞,黄海.DSP控制原理及在控制系统中的运用[M].北京:清华大学出版社,2003.347-348.
[4]孙艳霞.无刷直流电机传动控制系统的改进与实现.大连铁道学院学报,2000,21(1):39-42.
[5]王晓明,王岭.电动机的DSP控制.北京:北京航空航天大学出版社,2004.229-235.
[6]李久胜.王炎.交流伺服系统滑模控制器的动态设计.电气传动,2001,5(3):17-22.


Application of DSP to Control System of BLDC Motor
HuangBin
(CSIC 750 Proving Ground, Kunming 650010, China)
AbstractThis paper introduces the design principle and procedure of DSP in position control of brushless DC motor control system. For the problem of PID algorithm in speed regulation of brushless DC motor, the nonlinear variable-speed integration PID algorithm is selected and successfully applied in design, and PWM control technology is used in control system. The experimental results show that the system has the advantages of simple control structure, fast and stable motor start, wide speed adjustment range and high reliability. The application prospect of the system is very broad.
Key wordsBrushless DC motor;PWM;PID algorithm;DSP
收稿日期:2015-09-28
作者简介:黄斌男1986年生;毕业于重庆大学车辆工程专业,现从事电机技术工作.
中图分类号:TM301.2;TM33
文献标识码:A
文章编号:1008-7281(2015)06-0014-004
DOI:10.3969/J.ISSN.1008-7281.2015.06.05