人工鱼群算法在无功优化中的应用
2016-01-27张铁岩
彭 鹏,张铁岩
(1.沈阳理工大学 信息学院,辽宁 沈阳 110168; 2.沈阳工程学院,辽宁 沈阳 110136)
人工鱼群算法在无功优化中的应用
彭鹏1,张铁岩2
(1.沈阳理工大学 信息学院,辽宁 沈阳 110168; 2.沈阳工程学院,辽宁 沈阳 110136)
摘要:人工鱼群算法总结出了鱼群的行为所具有的基本特点,并结合动物自治理论,提出了一种新型优化模型。通过鱼的觅食行为、群聚行为、追尾行为、随机行为这4种行为对人工鱼的活动属性进行了描述。通过建立无功优化的数学模型,并将人工鱼群算法应用在配电网的动态无功优化过程中,通过IEEE-30标准节点系统进行仿真,验证了该算法的稳定性和可靠性。
关键词:电力系统;无功优化;人工鱼群算法
现代电力系统中,无功功率主要决定着电压降落的大小之差,而决定电压相角差的则是有功功率。电力系统中所提供无功功率质量的优劣会直接影响到电压质量,其原因:一是由于无功功率在电网中的分布不合理,二是系统自身所能提供的无功功率的匮乏。如果电网中的无功功率过度饱和,容易使系统电压升高,在这种情况下电压会在越限状态下运行,电压的过度升高甚至会对电网设备和电网本身造成不可逆的影响。电力系统的无功优化是确保系统平稳安全运行的重要手段,是在满足系统中各个约束函数和网络参数的前前下,给定有功出力,借助一种或多种优化技术来实现无功补偿容量和无功补偿地点的选取。
1配电网无功优化的数学模型
1.1无功优化的目标函数
考虑到无功优化的经济性,以降低网络损耗为目标,同时针对状态变量在优化过程中可能产生越限的情况,利用一定的罚函数来进行处理。目标函数的总表达式为
(1)
(2)
Uilim描述了节点i的状态变量的电压极限。
(3)
在这组描述状态变量的不等式中,QGj代表发电机的无功功率,而QGjlim代表QGj的上限或者下限。
在式(1)中,λU和λQ是适应度函数中所携带的罚因子,在优化计算中,要保证罚因子选取的正确性,即罚因子在适应度函数中所占的比重,如果罚因子在适应度函数中所占比重过小,则不能起到惩罚的作用。反之,如果罚因子所占比重过高,目标函数在适应度函数中所占的分量就会减小,导致待优化问题中原有的目标函数作用被淹没,影响无功优化算法的寻优速度和收敛的准确性。经过一系列的对比试验研究,选用的λU=10,λQ=5。
1.2无功优化的变量约束和功率约束
无功优化数学模型中的变量主要有控制变量和状态变量两类。通常选取发电机端电压的幅值UG,有载调压变压器分接头变比Ti以及并联电容器的投切组数QC作为控制变量,选取发电机的无功出力QG和节点电压幅值UD作为状态变量。
控制变量应满足如下不等式约束条件:
(4)
在以上约束条件中,UGi为节点i的电压幅值,UGi,min和UGi,max分别为节点i电压幅值的上限和下限,NG表示所有节点。Tij表示有载调压变压器分接头的档位,Ttj,min和Ttj,max分别表示有载调压变压器分接头档位的上限和下限,NT表示所有的有载调压变压器。QCk描述了无功功率的电容器补偿容量。QCk,max和QCk,min分别为QCk的上限和下限,NC表示所有的无功功率补偿电容器。
状态变量应满足如下不等式约束条件:
(5)
在以上约束条件中,QGi min和QGimax分别为无功出力的上限和下限,而UDj,min和UDj,max分别为发电机端电压的上限和下限。
在电力系统无功优化中,功率约束和等式约束条件是等价的。功率约束方程的极坐标描述为:
(6)
其中,Pi和Qi分别表示注入节点i的有功功率和无功功率,Ui表示节点i的电压幅值,Gij,Bij,θij分别描述了节点i,j之间的电导,电纳以及相角差,n为电力系统中总的节点数。
2人工鱼群算法
2.1人工鱼群算法简介
专家和学者在对鱼群进行长期研究的过程中,总结出了鱼群的行为所具有的基本特点,并结合动物自治理论,提出了一种称为人工鱼群算法的新型优化模型。其中,该算法通常具有如下几种行为:鱼的群聚行为、觅食行为、追尾行为以及随机行为。这种算法对于寻找最优解非常有效,具有并发性、简洁、跳出局部最优值速度快、寻优效率高的特点。
人类通常所具有的综合判断力以及推理能力是鱼类所不具备的,人工鱼群通过个体或群体的简单行为来突现其目的。以下的4种行为对人工鱼的活动属性进行了描述。
1) 觅食行为
觅食行为是人工鱼个体所具有的基本行为之一,即以寻找食物为趋向的一种活动,这种趋向通常是根据水域中的食物浓度对人工鱼视觉和味觉引起的感知来进行选择的,因此这种行为可以被应用于视觉概念中。
行为描述:Xi为人工鱼的当前状态, Xj为在可感知的视野内通过随机选择而得到的一个状态,Xi和Xj所具有关系为
Xj=Xi+Visual·Rand()
(7)
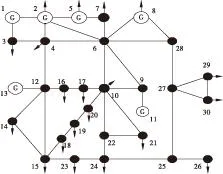
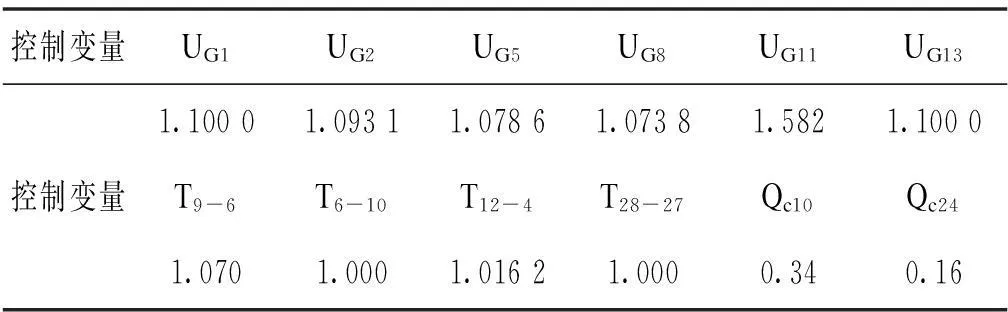
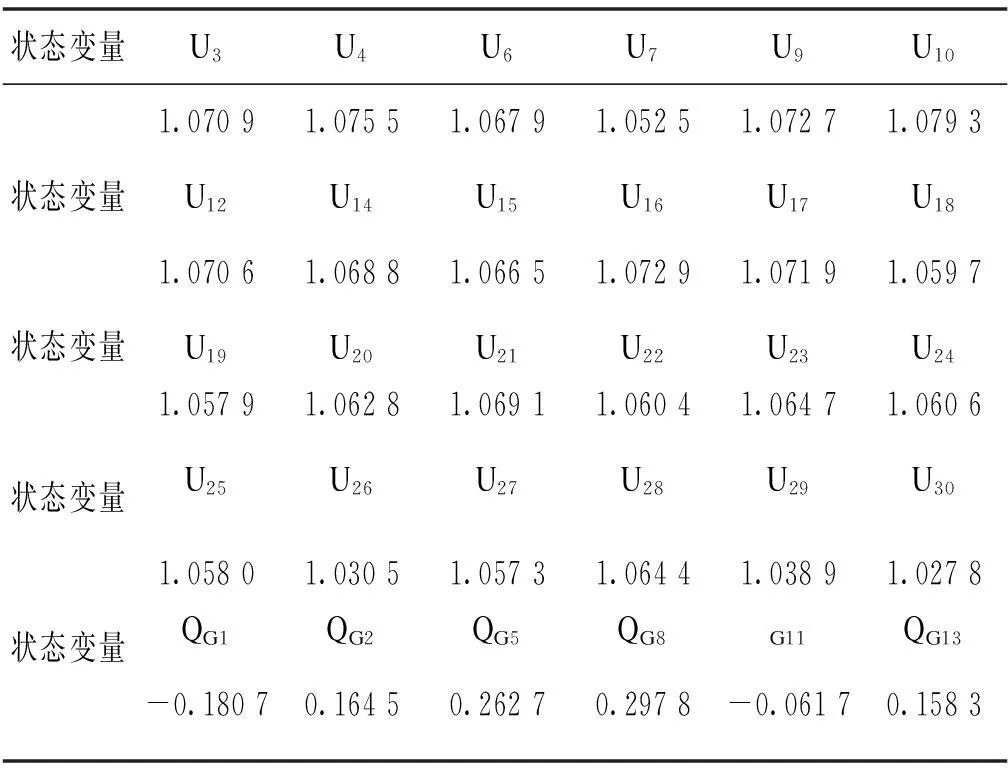
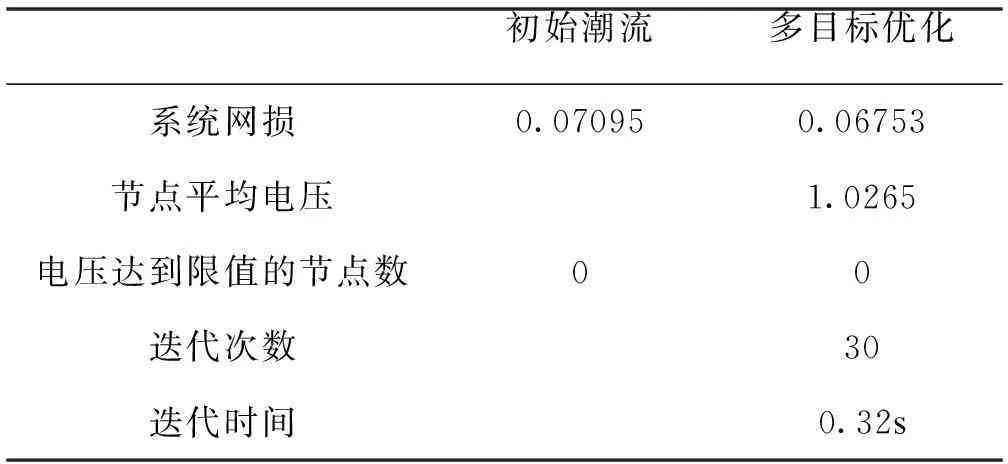
式(7)中,Rand()表示1个[0,1]内的随机值,在极大值问题的求解中,Yi (8) 否则,再对状态Xj进行重新选择,并和前进条件对比,经过多次计算迭代后,如果当前条件和前进条件依然不相符,则移动随机的一步。 (9) 2) 群聚行为 鱼仔游动过程中会自然地聚集成群,这也是为了保证群体的生存和躲避危害而形成的一种生活习性。鱼群的形成也是一种突现的生动事例,一般认为鸟类和鱼类集群的形成并不需要一个领头者,只需每只鸟或每条鱼遵循一些局部的相互作用规则,然后集群现象作为整体模式从个体的局部相互作用中突现出来。 行为描述:自然界中,鱼在游动过程中为保证群体的生存和躲避危害,会自然地聚集成群。在人工鱼群算法中对每条人工鱼作如下规定:一是尽量向邻近伙伴的中心移动,二是避免过分拥挤。 设人工鱼的当前状态为Xi,探索当前邻域内(dij (10) 否则执行觅食行为。 3) 追尾行为 鱼群在游动过程中,当其中一条鱼或几条鱼发现食物时,其邻近的伙伴会尾随其快速到达食物点。 行为描述:追尾行为是一种向邻近的有着最高适应度的人工与追逐的行为,在寻优算法中,可以理解为是向附近的最优伙伴前进的过程。设人工鱼i当前状态为Xi,探索当前邻域内(dij (11) 否则执行觅食行为。 4) 随机行为 平时会看到鱼在水中自由地游来游去,表面看是随机的,其实它们也是为了在更大范围内寻觅食物或同伴。 行为描述:随机行为的描述比较简单,就是在视野中随机选择一个状态,然后向该方向移动,其实它是觅食行为的一个缺省行为。 这4种行为在不同的条件下会相互转换,鱼类通过对行为的评价选择一种当前最优的行为进行执行,以达到食物浓度更高的位置,这是鱼类生存习惯。 对行为的评价是用来反映鱼自主行为的一种方式。在解决优化问题中,可以选用两种简单的评价方式:一种是选择最有行为就行执行,也就是在当前状态下,哪一种行为向最优的方向前进最大,就选择哪一行为;另一种是选择较优的方向前进,也就是任选一种行为,只要能向优的方向前进即可。 2.2公告牌的引入 在实际应用过程中,鱼群中心的轻微浮动可能导致算法错过全局最优解,因此可以在算法中加入公告牌的概念,用公告牌来对当前所获取的最优状态进行记录。 当人工鱼个体执行完一次行动后,会将自身状态与公告牌所记录的状态进行对比,选取二者中的较优值来更新公告牌,也就是公告牌保存着该鱼群所获得的历史最优值。 当公告牌的获取在允许的误差内保持稳定,说明系统已经达到稳定状态,这时公告牌中所记录的状态就是我们要获取的最优解。 2.3生存竞争机制的提出 在应用上述人工鱼群算法时,当寻优所在区域面积较大或者比较平坦时,一些人工鱼个体会漫无目的地随机移动,这就影响了算法的计算效率,生存竞争机制的引入可以让这种情况得到改善。 在环境变化的同时增强人工鱼个体的生存能力,这样就使得在全局极值处的人工鱼个体具有最强的生存能力,从而使得这些人工鱼的生存周期得到提高;陷入局部极值的一部分人工鱼则会在消亡后获得重生。 为了寻优效率的提高,消亡的人工鱼个体将以目前为止状态最优的人工鱼的状态重生,但这可能使得人工鱼整体陷入局部范围内的最优解。所以,在寻优的条件函数较为复杂时,可以允许人工鱼个体在其所在位置随机重生,从而可以在更加广阔的空间中进行寻优。 生存机制可以用如下等式描述: (12) 在式(12)中,h表示生存指数,E描述了该人工鱼所在位置的食物浓度,T表示生存周期,λ为消耗因子,即单位时间所消耗的能量。 当人工鱼所在区域的食物浓度可以满足其生命的维持时,人工鱼按正常情况进行寻优。否则,如果所在区域的能量不足以维持期生命,则可以认为人工鱼处在局部极值附近,所以需要强制其进行初始化。竞争机制的基本思想是对人工鱼个体的生存周期进行实时的调整。其基本思想可描述为 (13) 在公式(13)中,Emax表示人工鱼群整体所具有的食物浓度最大值,ε表示比例系数。 人工鱼群的生存周期在算法的进行过程中将会被逐渐提升,因此这将更有利于处在局部最优解区域内的人工鱼进行更加全局化的最优解搜索。 3人工鱼群算法在无功优化中的应用 基于人工鱼群算法的无功优化求解步骤如下: 1) 输入数据的初始值,获取计算中所需要的参数。 2) 将当前迭代次数Gen初始化为0,通过使用随机数生成器,生成具有N个人工鱼个体的初始群体,并且每个人工鱼个体的生成遵循以下原则。 在[0,1]区间内生成总数为NT+NG+NC的随机数,其中,NT+NG+NC=K,并由以下公式得到控制变量的值: Xk=Rand(Xkmax-Xkmin)+Xkmin (14) 在式(14)中,Xk(k=1,2,…,k)为无功优化中的控制变量,Rand(Xkmax-Xkmin)为[Xkmin,Xkmax]之间的随机数,Xkmin和Xkmax分别为各个控制变量的下限和上限。 对给定的各个控制变量参数计算其潮流,如果潮流计算收敛,保留当前的人工鱼个体,否则跳转到式(14)。 当所生成人工鱼个体总数目为时,进行步骤3)的优化计算,否则跳转到式 (14)。 3) 对鱼群中每个人公鱼个体所在位置的食物浓度值进行分析计算,并且通过比较,将公告板的值更新为所在位置食物浓度的最高值。 4) 将觅食行为作为每个人工鱼个体的缺省行为。每个人工鱼个体分别执行追尾行为和聚群行为。并将行动后所在位置食物浓度值较大的人工鱼作为实际执行动作的个体。 5) 在每个人工鱼个体状态更新后,对该人工鱼个体所处寻优区域,利用生存竞争策略进行判断,若该人工鱼个体所处的寻优区域的变化较为平坦,则对自身状态与公告板状态进行比较,如果自身状态优于公告板的当前状态,则将公告板的状态替换为自身状态。否则,继续进行步骤2)中的计算。 6) 结束条件判断。如果当前迭代次数Gen达到最大迭代次数Genmax,则输出计算结果,即公告板的当前值,否则Gen=Gen+1,并跳转到步骤4)。 4仿真计算及结果分析 选取IEEE-30标准节点作为仿真测试系统,系统节点如图1所示。 图1 IEEE-30 标准节点系统 将人工鱼群算法应用在IEEE- 30 标准系统,得到的仿真结果如下。 表1 控制变量优化值 pu 表2 状态变量优化值 pu 表3 优化参数值 5结论 上述仿真结果均是由10次运行结果取平均值所得到的,通过以上的对比可以得出,在优化前系统的全天有功功率网络损耗为1.384 2 pu,采用了改进后人工鱼群算法的全天有功功率网络损耗为1.140 7 pu,网络损耗的平均下降率为17.48%,而采用了经过优化的人工鱼群算法其全天的有功网络损耗为1.055 2 pu,网络损耗的平均下降率为23.67%,大幅降低了系统中的有功网损,使得电压顺平在一定的稳定范围内,并且没有越限的情况发生,使系统的经济性和安全性得以提高。 参考文献 [1]杨期余.配电网络[M].北京:中国电力出版社,2011. [2]诸骏伟.电力系统分析[M].中国电力出版社,2010:112-116. [3]徐进东.电力系统无功优化实用化方法研究[D].南京:河海大学,2011. [4]葛红,毛宗源.人工鱼群算法几个参数的研究[J].华南理工大学学报,2012,30(12):15-18. [5]王磊,潘进,焦李成.免疫算法[J].电子学报,2011,28(7):74-78. (责任编辑佟金锴校对张凯) Application of Artificial Fish-Swarm Algorithm in Reactive Power Optimization PENG Peng1,ZHANG Tie-yan2 (1. School of Information Science and Engineering, Shenyang Ligong University, Shenyang 110168; 2. Shenyang Institute of Engineering, Shenyang 110136, Liaoning Province) Abstract:AFSA (artificial fish-swarm algorithm) is a new optimization method based on a series of instinctive behaviors such as searching for food, bunching, AF-follow and random behavior combined with the animal autonomy theory. In this paper, AFSA was applied to the dynamic reactive power optimization in the distribution grid based on the established mathematical model of reactive power optimization. The simulation of the standard IEEE-30 node system verified the stability and reliability of the algorithm. Key words:Power system; Reactive power optimization; AFSA DOI:10.13888/j.cnki.jsie(ns).2015.01.014 通讯作者:许傲然(1983-),男,吉林通化人,讲师。 作者简介:田武(1989-),男,安徽亳州人,硕士研究生。 收稿日期:2014-06-04 中图分类号:TM714.3 文献标识码:A 文章编号:1673-1603(2015)01-0058-05