基于专家S面控制的UUV姿态控制系统设计
2016-01-27黄悦华刘瑞勇杨培培向东旭
黄悦华 刘瑞勇 杨培培 李 闯 向东旭
(三峡大学 电气与新能源学院, 湖北 宜昌 443002)
基于专家S面控制的UUV姿态控制系统设计
黄悦华刘瑞勇杨培培李闯向东旭
(三峡大学 电气与新能源学院, 湖北 宜昌443002)
摘要:近年来,长航程UUV的应用越来越多,长航程UUV在水下进行长距离航行时,由于不同水域的海水密度不同,使得UUV的受力状况发生变化,从而影响其航行姿态角,使其不能按照预定的路径完成航行任务,甚至发生危险.本文针对姿态变化问题,将专家控制和S面控制相结合,设计一种专家S面控制器,并进行半实物仿真.仿真试验结果表明,该方法可以实现对UUV实时准确的定深定向调节,满足实际使用要求.
关键词:UUV;整体构架;专家S面控制;定深定向;半实物仿真
UUV恶劣的工作环境决定了其可能会遇到各种可控或不可控的危险,如果UUV没有性能良好的控制系统,极有可能会导致水下机器人失事或失联[1],最终沉入海底或者被他国所窃取.基于此,面对复杂的海域工作环境,如何研究有效且可靠的UUV控制系统,成为装备高质量UUV设备的重要课题.
1UUV整体构架
综合控制系统是整个UUV的核心组成部分,其设计的优劣直接影响到整个UUV的性能以及航行的安全性.该课题中UUV的航行分为自主航行和遥控模式两种航行方式,其中自主航行由中央控制单元自主决策控制航行,遥控模式下的航行是通过上位机以无线电或者有揽通信的方式与实验艇通信;自主航行模式下,通过惯导(INS)、深度计、多普勒测速仪(DVL)等传感器获取UUV的运动信息,并根据这些信息做出控制决策,来完成自主航行任务.本课题设计的UUV综合控制系统整体构架如图1所示.
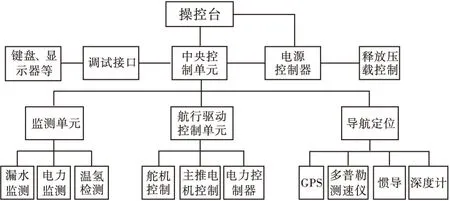
图1 UUV控制系统整体构架
此UUV具有如下功能:
1)通过操控台可对UUV进行操控,包括对各个模块的电源控制、对UUV进行手操驾驶、预编程操控、定向航行、定深航行控制.
2)UUV实时信息可以实时反馈给操控台.包括UUV电池组的测量系统和控制系统的电流、电压、已用电量,实验艇的实时姿态:横滚角、俯仰角、偏航角、航行速度、电机转速、实时位置、深度,离底高度,各个阀门开关状态、各个水舱水量、以及舱内实时图像等.这些数据通过两路信道传输,为保证航行安全,主要考虑无线电通信的顺畅[2].
3)对UUV运行状态进行实时监测,包括7个舱的漏水检测、温度检测、氢气浓度检测、火警检测;控制系统、测量系统以推进电机电流和电压监测以及超深、超速、无线电通信等各种报警检测,并具备在运行故障(主要指超深)情况下通过释放压载确保实验艇的安全.
4)通过给定推电机的转速或者航速(一般而言,转速和航速对应有一定的关系)可以控制UUV的前进,通过给定水平舵机、垂直舵机和围壳舵机一定角度来控制UUV转向和下潜运动,通过压载水舱注排水及左右浮力水舱调水可以控制艇的横滚、俯仰等艇态和负浮力的设定,以在水面环境不利于水平舵机发挥舵效的时候辅助UUV顺利下潜.
5)对UUV位置进行实时监测,并具有导航定位功能.UUV在水面标定时完成GPS的信息的收集,并将该信息给到惯性导航装置,当实验艇下潜到水下时,由惯性导航装置和多普勒计程仪计算出当前的航行位置,当实验艇浮出水面时,通过操控台给定校准指令,将当前实验艇的位置与GPS位置进行校准.实验艇同时利用深度计和多普勒计程仪实时获取UUV在水下的深度和离底高度、航行速度等信息.
6)可通过路径规划来实现实验艇的路径跟踪航行.
2专家S面控制器设计
2.1智能积分S面控制模型


这样的积分作用即为智能积分.引入智能积分,能够在模糊控制的基础上提高控制系统的稳态状态和精度.有智能积分的条件可以得到智能积分的S面控制模型[4],如下描述:
由S面控制模型可知,控制参数为k1、k2和ki,相比模糊控制,S面控制需要调整的变量简单得多.改变k1、k2和ki的值就能实现偏差和偏差变化率在控制输出中的比重的调整,达到对超调量和收敛速度的控制效果的优化[5],同时控制系统的稳态误差,以满足智能作业的要求.
在S面控制系统中,一般采用人工调整或者自适应调整这两种参数调整方式.所谓人工调整,指的是通过对k1、k2和ki大小的调节,实现水下机器人在一般情况下的运动控制精度.所谓自适应调整,指的是需对k1、k2两个参数进行智能的在线调整,实现系统实时的动态性能和稳态性能.应该注意的是,在参数调整的过程中,由于是全局范围内的参数调整,导致自适应调整和人工调整都不能达到控制参数的最佳匹配.但是,S面控制方法主要关注控制过程的全局性,注重控制过程稳定、超调小、平滑、收敛速度快等控制效果.通过对S面控制器参数的修改,能够比较方便地完成控制器全局过程的控制.
在自适应调整中,参数k1、k2对S面控制器的控制作用有重要影响,即这两个参数的变化会对S面控制器的输出产生大的干扰,导致控制系统的动态性能和稳态性能的变化,对于水下机器人而言,固定k1、k2的值不能达到较好的控制效果[6].
2.2专家S面系统结构
通过本章前面的阐述,可以建立一个完整的智能控制理论模型—专家S面控制器,其控制模型如图2所示.专家S面控制器是以间接专家控制系统为基础,运用人的知识和经验[7],并按照专家在求解控制问题时的启发式思维模式和控制规则构造而成的控制策略.专家S面控制器通过对参数k1、k2和ki的在线调整,使得系统动态性能和稳态性能达到要求.
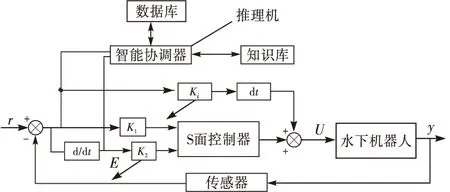
图2 专家S面系统结构
专家S面控制器作为一个二级实时智能协调控制器,由两部分组成:专家智能协调级、基本控制级.由S面控制和专家控制组成控制级,S面控制器为控制系统的基本控制级,控制级与被控对象组成实时闭环控制系统.专家智能协调级由数据库、知识库和智能协调器组成,数据库主要用来存放误差变化率和误差的阈值以及参数k1、k2的在线调整范围;知识库主要为常规的产生式规则的集合;智能协调器为推理机.专家智能协调级主要实现在线监测控制系统,实时监测系统性能[8].
根据系统的数据信息,通过推理机完成对S面控制器参数的在线调整,实现对控制对象的有效控制.在本文的研究对象中,存在规则库少、推理搜索空间有限的缺点,因此本文采用有条件推理结论的正向推理机制[9],通过对控制规则的逐条匹配,实现控制规则集的完善和在线智能.
2.3控制参数在线调整算法
由S面的数学控制模型可知,在S面控制系统中,控制参数k1、k2分别对偏差和偏差变化率有很大的影响效果,下面对系统响应的影响进行具体分析:控制参数k1影响偏差e在系统中的控制作用.k1的变化将引起误差的控制效果,如果k1取值增大,误差的控制效果相应增强,导致系统控制所要上升时间变短,由于控制的惯性作用,产生较大的超调量,收敛速度变慢,如果k1选取过大,系统可能产生较大幅度的震荡现象,所以k1的值不能过大.如果减小参数k1的值,削弱误差的控制作用,这样可以减小超调量,同时避免震荡的产生,但如果k1的值过小,导致误差的控制作用不够,将使得上升速度变缓,收敛时间增长,稳定状态下的误差变大,同样不能达到控制效果.

通过分析,控制参数k1、k2的选取将对控制器的控制效果造成不同的影响,在系统的不同控制阶段,参数k1、k2的值都将对控制器的控制效果产生不同的影响.
通过对S面控制系统经验的总结,得到了如下所示的控制参数在线调整算法,这样的一组产生式的控制规则用来实现本文控制策略中的k1、k2和ki选取:


本文中,k1(0)、k2(0)和ki的初始值主要按照控制系统的特性和控制经验选取.
3半实物仿真
3.1半实物仿真系统设计
UUV定深定向控制系统半实物仿真试验,要求能为UUV定深定向控制系统提供真实的工作环境,模拟不同的工作条件,并能模拟各种极端条件下的工作情况,以检验系统的控制器的各种功能和可靠性,分析系统、设备的临界工作条件.UUV定深定向控制系统半实物仿真试验具体应实现如下功能:
1)仿真机建立UUV的模型,包括6个自由度的受力模型以及动力系统、浮力、均衡模型,并对UUV的6自由度非线性模型进行仿真解算.
2)采用半实物模拟机构,即三轴转台,直观地体现给定艉水平舵、艉垂直舵、围壳舵舵角时,三轴转台的运动状态,分析反馈数据的正确性.在UUV预编程航行及自主航行时候,观察定深定向航行过程中三轴转台的变化过程,分析其合理性.
3)通过海流模拟器模拟不同的海况,浪涌、温度、盐度、深度等数据,分析在不同的海况下算法的适应性.
4)通过中央控制单元输入的UUV定深航行的深度,模拟定深航行过程,分析到达预定深度的仿真波形图;通过中央控制单元输入UUV的航向,模拟定向航行过程,分析到达预定航向的仿真波形图.
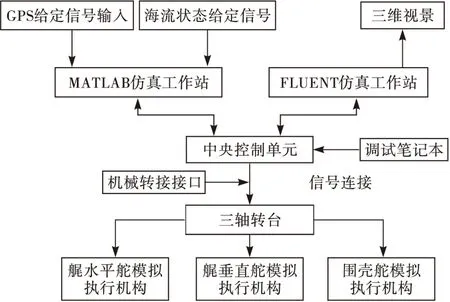
图3 半实物仿真系统原理图
UUV定深定向控制系统半实物仿真试验原理图如图3所示,为了UUV定深定向控制系统的功能,在进行UUV定深定向控制系统半实物仿真系统设计时,必须包括以下设备:1)DSPACE实时仿真系统:主要功能是仿真被控对象和环境;2)Matlab仿真工作站:主要功能是建立UUV定深定向控制系统的数学模型;3)Fluent仿真工作站:主要完成UUV结构特性分析、流体动力性能分析;4)GPS及深度信号给定机构:自主航行和预编程航行时,需要最初的GPS位置信号才能开始航行,深度给定信号后才能进行定深航行,为提供UUV的航行深度控制;5)中央控制单元:本课题使用的中央控制单元是由盛博协同设计制作,主要是基于PC104主板设计的.主要的定深定向算法均在中央控制单元中执行.在进行定深定向控制时,根据Matlab仿真工作站反馈的深度信息进行定深控制,同时根据三轴转台给定的航向角进行航向控制,根据三轴转台给定的横滚角和俯仰角进行航行过程中的姿态控制;6)本文所研究的控制对象比较特殊,不同于一般UUV,在下潜过程中先进行注水动作使得实验艇处于零浮力的状态,然后电机启动,艉水平舵、围壳舵、艉垂直舵开始打舵.因此在Matlab仿真工作站的仿真模型应建立均衡系统模拟完成注排水过程.基于均衡系统设计需要准确的主排水流量信息,故在本文中使用的模型没有采用均衡系统.在下潜准备过程中直接将潜深初值设置为-2 m.浮力状态设置为小负浮力状态下开始仿真.
3.2半实物仿真模型
如图4所示为定深定向的Matlab工作站半实物仿真模型,主要由3部分组成,控制算法、深度控制模型、航向控制模型.
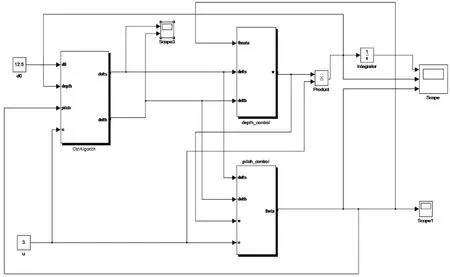
图4 定深定向半仿真模型
定深算法中,对俯仰角的控制具有重大意义,它除了能更好地控制航行器下潜姿态以外,还是衡量控制算法的一个重要指标.为了保证航行器定深控制的性能,俯仰角在定深控制过程中至关重要.
在实际航行过程中,由于海流等各种干扰因素的存在,控制定深常态状态下会存在一定的偏差,UUV在航行时就会通过不停的打舵来校正俯仰角,保持航行的姿态,一般情况下,UUV的俯仰角不应该超过正负10°的范围,对于本文的研究对象而言,由于其体积重量庞大,艇体长的特点,一般控制实验艇的俯仰角在正负5°的范围以内,否则就要进行水下均衡调整艇的状态,甚至进行应急处理以保证实验的安全.
定深控制主要是航行器从水面下潜到某一深度和航行器在某一深度航行时受到各种扰动而加以纠正控制.深度的变化必将伴随着俯仰角的的变化,俯仰角如果变化过于剧烈,深度控制将产生较大的超调量,如果俯仰角变化过于缓慢,将导致深度变化也很缓慢,调节时间长.
该控制算法是基于专家S面控制算法研究而设计的,控制算法考虑了UUV的垂向速度以及俯仰角速度,由于UUV的排量大,机动能力较小型UUV差,因此通过UUV的艉水平舵和艏水平舵来实现的.
3.3仿真结果与分析
1)定深20 m,即深度从0 m变深到20 m的过程,航向角定向10°,且从0°变到10°,如图5所示.如图5(a)所示,此次定深定向航行过程中第240 s时航行深度第一次达到20 m,之后60 s发生了超调,超调量0.8 m左右,第400 s时航行深度收敛于20 m的设定深度值,具有较好的深度控制效果;在定深定向航行的过程中,由图5(b)可以看出,实验艇在0~100的范围内产生了一个大的埋首,根据智能控制的理念,俯仰角提前产生归零趋势,在200 s时俯仰角为0°,此时系统检测深度未到20 m,再次产生埋首的效果,直到第400 s系统深度到达20 m,实验艇开始抬首,此时抬首,产生了一定的超调量.此定向航行中航向角的基本趋势、控制趋势与定深航行相同.图5(d)中也对定深航行过程中(0~400 s的时间内)的垂向速度进行了分析,可以看出,在340 s左右的时间上,垂向速度由正值向负值过渡,以抵消超调.

图5 定深20 m半实物仿真波形
2)定深12.5 m,即深度从0 m变深到12.5 m,航向角5°方向,且从0°到5° ,如图6所示.
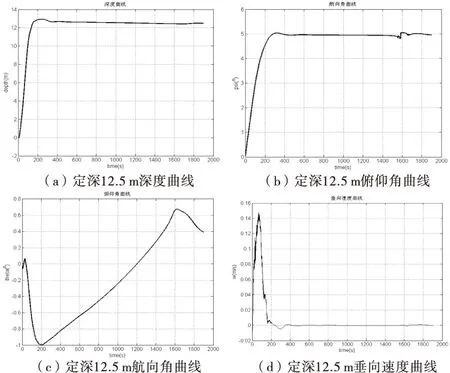
图6 定深12.5 m半实物仿真波形
如图6(a)所示,此次定深定向航行过程中第170 s时航行深度第一次达到12.50 m,之后50 s发生了超调,超调量0.6 m,第340 s时航行深度收敛于12.5 m的设定深度值,具有较好的深度控制效果;在定深定向航行的过程中,由图6(c)可以看出,实验艇在0~200的范围内产生了一个大的埋首,根据智能控制的理念,俯仰角提前产生归零趋势,在1 200 s时俯仰角为0°,12.5 m定深航行的效果与20 m定深航行的不同,俯仰角曲线在很长时间范围内均存在波动,其原因是小深度控制存在近水面干扰.
4结论
本文将专家控制与S面控制相结合,设计了一种专家S面控制器,对专家S面控制算法进行半实物仿真分析,分别在定深20 m和定深12.5 m,定向10°时对定深效果和定向效果进行分析,得出了较好的结论;进行了水下变深的半实物仿真实验,实验结果表明,变深过程中姿态基本稳定,能够满足实际使用要求.
参考文献:
[1]王彦东.基于定性仿真的水下机器人故障诊断技术的研究[D].哈尔滨:哈尔滨工程大学,2009.
[2]査智,卢海洋.运用PC104和分布式CAN总线的智能UUV设计[J].重庆理工大学学报:自然科学版,2013,27(8):97-100.
[3]曹辉进.自主式水下航行器建模与运动控制仿真研究[D].天津:天津大学,2004.
[4]李岳明,庞永杰,万磊.水下机器人自适应S面控制[J].上海交通大学学报,2012,46(2):195-200.
[5]夏庆锋,刘健.模糊滑模控制在UUV控制中的应用[J].微计算机信息,2010,26(4-1):26-28.
[6]Salgado-Jimbnez T, Spiewak J M, Fraisse P, et al. A Robust Control Algorithm for UUV Based on a High Order Sliding Mode [J]. OCEANS '04. MTTS/IEEE TECHNO-OCEAN '04 , 2004(1):276-281.
[7]刘学敏,徐玉如. 水下机器人运动的S面控制方法[J].海洋工程,2001,19(3):81-84.
[8]Li Yun. PID Control System Analysis and Design[J]. IEEE Control Systems Magazine, 2006(2):1032-1041.
[9]Tanak K,Sugeno M.Stability Analysis and Design of Fuzzy Control System[J]. Fuzzy Sets and Systems,1992,45(2):135-156.
[责任编辑张莉]
Design of UUV Attitude Control System Based on Expert S Control
Huang YuehuaLiu RuiyongYang PeipeiLi ChuangXiang Dongxu
(College of Electrical Engineering & Renewable Energy, China Three Gorges Univ., Yichang 443002, China)
AbstractIn recent years, the application of long voyage UUV becomes more and more popular, when the UUV underwater to sail long-distance, due to the different densities of seawater in different waters, the force status of UUV changed, so as to affect the sailing attitude of UUV; so the UUV can not be complete the navigation task in accordance with a predetermined path, even in danger. In this paper, for the attitude change, we combine the S control and expert control to design a expert s controller and having a semi-physical simulation. The simulation results show that this method can meet the actual requirements to adjust the depth-direction of UUV in real-time and accurately.
Keywordsunmanned underwater vehicle(UUV);overall framework;expert S control;depth-direction;semi-physical simulation
基金项目:国家自然科学基金(61374028,61174216, 51177088);湖北省自然科学基金(2013CFA050)
收稿日期:2015-09-17
中图分类号:TP273
文献标识码:A
文章编号:1672-948X(2015)06-0080-05
DOI:10.13393/j.cnki.issn.1672-948X.2015.06.017
通信作者:黄悦华(1972-),男,教授,主要研究方向为控制理论与控制工程.E-mail:805254454@qq.com