基于UML通用性机载雷达仿真器系统建模与仿真
2016-01-27杨万扣
熊 伟, 高 霞, 王 力, 杨万扣
(1. 东南大学自动化学院, 江苏 南京 210096;
2. 中航工业雷华电子技术研究所, 江苏 无锡 214063)
基于UML通用性机载雷达仿真器系统建模与仿真
熊伟1,2, 高霞2, 王力2, 杨万扣1
(1. 东南大学自动化学院, 江苏 南京 210096;
2. 中航工业雷华电子技术研究所, 江苏 无锡 214063)
摘要:采用统一建模语言(unified modeling language,UML)提出了一种模块化、易扩展和通用性的机载雷达功能级仿真器体系结构,分为系统控制、天线、信号处理机和数据处理机共4个对象进行模块化设计,具备机载脉冲多普勒雷达和相控阵雷达的仿真能力。建立和分析了机载雷达仿真器系统的工作流程、目标检测、目标跟踪、误差分析和电磁对抗模型,并采用Visual C++语言对所建模型进行了仿真实现,仿真结果充分验证了模型的可行性和有效性,为机载雷达的功能验证和作战效能评估提供了平台和依据。
关键词:机载雷达; 仿真器系统; 系统建模; 统一建模语言
0引言
雷达系统仿真是计算机仿真技术和雷达技术结合的产物,是雷达系统设计和作战效能分析评估的有效方法。近年来,以雷达系统仿真技术为代表的军用仿真技术得到了迅猛发展[1-7]。雷达系统仿真就是利用雷达系统模型对实际系统进行仿真研究,根据不同阶段不同分系统的仿真结果来辅助雷达系统研究和作战效能评估的各项工作,其根本目的在于基于仿真结果,代替或部分代替实际系统的试验结果,并对其进行研究和分析[1-2,6-7]。
当前雷达系统的仿真方法主要分为两类,一类是信号级仿真,另一类是功能级仿真。两类方法的主要差异在于功能级仿真只考虑信号的幅度信息,而信号级仿真既考虑信号的幅度信息又考虑信号的相位信息[2],仿真复现了雷达信号传播和处理的全过程因而比功能级仿真的粒度更细, 模型更加逼真, 精度更高。如美国Cadence公司的SPW(signal processing workstation)、美国ELANIX公司的SystemView等信号层仿真商用软件,可以建立到雷达信号处理滤波器定义、发射信号波形脉内描述等细节的数字模型,但同时信号级仿真运行所需要的设备和时间也就更多。与信号级仿真相比,功能级仿真结构简单、实时性好、且便于扩展,是雷达仿真验证系统研制中广泛采用的一类仿真方法。本文运用功能级仿真对通用性机载雷达仿真器系统的建模和仿真方法进行研究。机载雷达系统是一个复杂的大系统,涉及到系统控制、天线、信号处理机、数据处理机等多个分级系统,它的建模仿真已非传统的系统仿真模式所能胜任。同时,目前大多数雷达仿真系统仅为满足某一特定的军事研制需求而建模设计的[1-2,5-7],功能比较单一,不能适应不同雷达工作者提出的个性化需求,因而导致需对已开发的雷达仿真器系统进行不断升级,同时也使得雷达仿真器系统陷于建模仿真周期长、功能低的困境中。因此,模块化设计一个具有良好通用性和可扩展性的机载雷达仿真器系统具有重要意义。
统一建模语言(unified modeling language, UML)使用面向对象的概念分析、描述软件系统并构造系统模型[8],是一种在军事战术战略仿真等大型复杂系统建模领域中广泛应用并得到普遍认可的软件工程方法[6,9-11]。
本文采用UML面向对象的设计模式,将整个雷达系统分为系统控制、天线、信号处理机和数据处理机共4个对象进行模块化设计,基于雷达方程建立综合信噪比/信干比模型,并进行雷达目标检测、目标跟踪和电磁对抗的功能性建模和仿真。整个机载雷达仿真系统不仅具有模块化结构,而且容易理解,便于扩展并同时具有良好的透明性和重复使用性。
1系统模型的构成
1.1顶层逻辑
将整个机载雷达仿真系统看作一个联邦,如图1所示,其成员包括综合航电系统、机载火控雷达系统和仿真环境共3个成员,其中综合航电系统成员负责仿真航电系统对机载雷达的控制;仿真环境成员负责对各种仿真环境进行建模仿真,包括目标特性、目标轨迹、自卫式干扰和支援式干扰等;机载火控雷达成员负责仿真雷达对来袭目标的探测、跟踪、分辨、抗干扰等,并对其效能进行评估。

图1 机载雷达仿真器系统逻辑结构
首先,由综合航电系统向雷达控制接口发送雷达控制指令,同时雷达从仿真环境中获取所需的相关数据包括目标信息、电磁环境信息等,并根据航电控制指令及自身的逻辑控制,进行目标检测、跟踪滤波、抗干扰等相关计算,最后输出雷达探测目标信息送至综合航电系统。
1.2运行状态
整个系统的运行状态图如图2所示。首先由仿真实体创建机载雷达仿真模型,模型创建完毕后进入待命状态,等待接收初始化数据。当接到仿真实体初始化数据后进行模型的初始化,如果初始化成功则进入就绪状态,如果初始化失败则向实体模型报错,并重新进入待命状态。在就绪状态如果接到实体模型的调用命令则进入运行状态,在运行状态仿真模型会周期性接到实体模型的调用指令,并周期性地进行模型解算。在待命、就绪和运行状态机载雷达仿真模型都有可能接到实体模型的删除命令,这时模型释放分配的资源,注销模型,结束模型的运行。
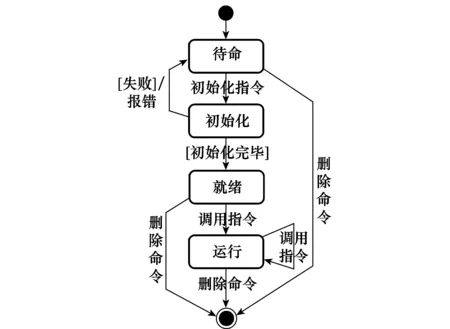
图2 机载雷达仿真系统运行状态图
1.3逻辑包设计
机载雷达仿真系统的顶层逻辑包包括模型入口包、机载雷达模型包、机载雷达数据结构包和枚举类型结构体包,其中机载雷达模型包又包括系统控制包、天线模型包、信号处理包和数据处理包4个子包,其仿真运行时序图如图3所示。
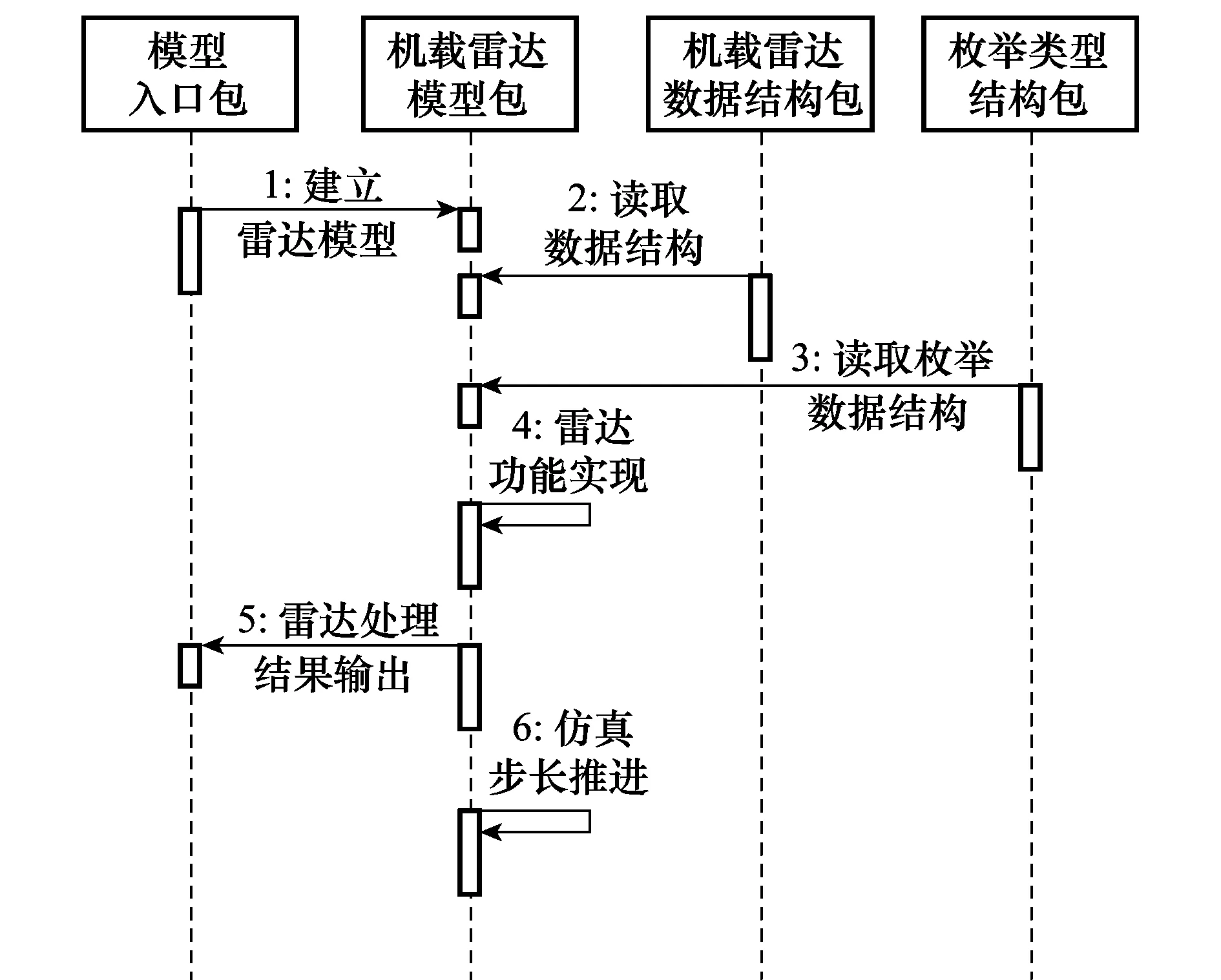
图3 机载雷达系统仿真时序图
1.4类设计
如图4所示,机载雷达模型类CRadarModel可根据不同型号、不同类型的机载雷达(如脉冲多普勒雷达或相控阵雷达)创建相应的系统控制类CRadarControl、天线模型类CRadarAntenna、信号处理类CRadarSigProc和数据处理类CRadarDataProc,实现分系统模型的创建,并仿真主流程的控制等。其中类CRadarControl、CRadarAntenna、CRadarSigProc和CRadarData-Proc分别为雷达系统控制、天线、信号处理和数据处理分系统对象的抽象基类,分别定义了各种不同分系统对象的统一接口和功能,并由相应的类工厂CRadarControl-Factory、CRadarAntenna-Factory、CRadarSigProc-Factory、CRadarDataProc-Factory负责创建。如图5所示,类CRadarPhaseAntenna和类CRadarMechAntenna不仅继承了天线基类CRadarAntenna的统一接口和功能,而且分别实现了相扫天线和机扫天线模型。

图4 机载雷达仿真系统类视图

图5 天线类的继承关系
2机载雷达系统功能模型
2.1系统仿真流程
机载雷达仿真系统以固定时间为仿真步长向前推进,在每个仿真步长内仿真系统的处理流程如图6所示。

图6 机载雷达系统仿真流程
2.2目标检测
2.2.1综合信噪比
雷达目标检测的SNR或者电磁干扰环境中的SJR是决定目标能否被检测的关键因素。由式(1)、式(2)可知,SNR和SJR由目标回波信号功率、接收机噪声功率、杂波功率以及干扰信号功率等因素决定[12]。
(1)
(2)
式中,Ps为目标回波信号功率;Pn表示接收机噪声功率与杂波功率和;Pc,Pj分别为雷达接收到的无源干扰信号功率和有源干扰信号功率;Dc≥1、Da≥1分别表示雷达采用综合抗干扰措施抗无源干扰、有源干扰的改善因子, 未采用综合抗干扰措施时Dc=1,Da=1。
在雷达回波信号功能仿真模型中,目标散射回波信号功率和有源干扰功率[12]分别为
(3)
(4)
式中,R为目标与雷达距离;Lt,Lr分别表示雷达的发射综合损耗和接收综合损耗,LAtm为电磁波在大气中的传输损耗;Pt为雷达发射峰值功率;Gt,Gr分别表示雷达发射天线增益和接收天线增益;λ为雷达工作波长;σ为目标的有效雷达截面积;D表示雷达抗干扰综合改善因子;Pj为干扰机发射功率;Gj,Grj分别表示干扰机发射天线增益和干扰机方向雷达的接收天线增益;Rj为干扰机与雷达的距离;Lj为干扰机综合损耗;Br,Bj分别表示雷达接收机的瞬时带宽和干扰信号带宽。特别地,当Grj为雷达天线主瓣增益时,则Pj表示自卫式干扰功率,当Grj为雷达天线旁瓣增益时,则Pj表示支援式干扰功率。

(5)
式中,k=1.38×10-23J/K为玻尔兹曼常数;T0=290 K为接收机参考温度;BR为接收机瞬时带宽;NF∈(0 dB,15 dB)为噪声系数[12]。
通过对智能工程建设过程中各阶段的了解,发现智能工程建造中存在着各种影响因素。因此,为确保政府大楼智能工程项目可以按时保质完成,需要在智能工程建设施工中进行方案设计,做好工程进度控制。
在计算综合SNR/SJR前,需综合判断目标是否在雷达天线扫描范围和雷达最大作用距离内,当目标在雷达天线扫描范围和雷达最大作用距离之外时,直接将SNR或SJR置为0。
2.2.2检测确认模型
计算出雷达接收目标的SNR或SJR后,基于预先拟合的检测曲线计算目标的发现概率Pd,并在(0,1)均匀分布上随机取值,记为P0,当Pd≥P0时表示发现目标,反之未发现目标。
为了减少虚警率,搜索发现目标时采用目标确认处理方式,即连续检测m次,当有k(k≤m)次发现目标时,确认发现目标。仿真中m,k取值随具体雷达型号而定,一般取m=5,k=3。
2.3误差模型
误差模型可以分别表示为雷达跟踪测距精度σR、测速精度σv和测角精度σΔθ的正态随机分布。理论上,由雷达时延测量距离的均方根误差[12]为
(6)
式中,β为有效带宽;C为电磁波传播速度;E/N0为匹配滤波器输出端峰值最大信噪比。径向速度测量的均方根误差[12]为
(7)
(8)
式中,s(t)为雷达时域信号。雷达角度测量的均方根误差为
(9)
式中,γ为有效孔径宽度。对于孔径上具有均匀幅度照射的天线而言,理论角度测量均方根误差[12]为
(10)
式中,θB为波束宽度。
2.4目标跟踪
雷达目标跟踪处理的逻辑框图如图7所示。常见的跟踪滤波器α-β有滤波器、α-β-γ滤波器、卡尔曼滤波器、扩展卡尔曼滤波器、粒子滤波器和概率假设密度滤波器等,数据关联算法可选用概率数据关联算法、最近邻域关联算法等[13-17]。本文仿真系统采用扩展卡尔曼滤波器和最近邻域关联算法进行目标跟踪仿真和功能验证,也可直接替换为其他滤波器和关联算法进行论证分析。

图7 目标跟踪逻辑流程图
2.5电磁对抗模型
雷达干扰基本上可以分别为遮盖性干扰和欺骗性干扰。遮盖性干扰主要表现为压制性的强噪声,影响雷达目标检测的SJR,使目标的距离和多普勒信息难以提取。欺骗性干扰主要破坏雷达的跟踪系统,使雷达跟踪出现错误的假目标信息,从而保护目标[18]。
欺骗性干扰仿真的数学模型[18]为
(11)
式中,AJ为干扰信号幅度并大于目标回波信号;Δt和Δω分别为欺骗信号相对目标正常回波信号的距离延时和多普勒频移量。特别地,当Δω=0,Δt≠0且作周期性拖引变化,式(11)表示距离拖引干扰;当Δt=0,Δω≠0且作周期性拖引变化时,式(11)表示速度拖引干扰。
在雷达抗干扰措施效果的定量分析和仿真研究时,需对抗干扰措施的性能指标进行定量评估。本文在遮盖式干扰的对抗效果仿真中,引入不同抗干扰措施的抗干扰改善因子D[18],根据式(2)和式(3)以改善目标检测的SJR。
(12)
式中,D1,D2,…,Dn分别表示低副瓣天线、旁瓣对消、频率捷变等抗干扰措施的抗干扰改善因子。与对抗遮盖式干扰仿真不同,抗欺骗干扰成功与否可以用抗欺骗干扰的概率p[18]来描述:
(13)
式中,pj1,pj2,pj3分别表示干扰机侦察系统截获、分选和模拟雷达信号的概率;pr1,pr2,pr3分别表示雷达在空域、时域以及采用其他方法识别假目标概率。
3系统实现
根据上述机载雷达系统的UML模型,利用UML快速开发应用程序Rational Rose 2002提供的代码导出功能生成仿真系统框架结构的C++代码,然后基于上述的仿真模型添加各实体模块的功能仿真代码,并采用MFC对系统进行了软件实现。
3.1场景想定
在进行机载雷达系统功能仿真之前,首先需对仿真的场景进行想定。首先,如图8所示,在场景想定中,需确定红蓝双方的飞机型号以便实现不同类型雷达的不同功能,其中当蓝方目标为地面或海上目标时,其飞机型号选定无效。其次,如图9所示,在态势参数设置框中设置红方飞机的航向角、载机高度、飞行速度等飞行参数,确定蓝方目标的个数、目标队列、场景模式、速度、目标RCS、目标起伏特性等参数,以便实现不同目标实体(包括空中、地面和海上目标)的模拟仿真。最后,根据仿真需求,决定是否体现电子干扰环境和抗干扰效果,确定干扰载机平台和相应的干扰类型,其中仿真的干扰类型包括噪声干扰和欺骗性干扰。

图8 场景想定界面

图9 态势参数设置
3.2雷达仿真参数设置
在仿真场景想定完毕后,下面需要对红蓝双方加载的不同类型的雷达进行参数设置,如图10所示,以便实现雷达相应功能的仿真。在图10(a)雷达系统参数设置界面中按照雷达系统的主要构成分为天线、发射机、接收机、信号处理和数据处理5个部分设置。其中在信号处理部分,高中低重频下的脉冲个数、脉冲宽度、脉冲重复频率、脉压增益、占空比等参数组成雷达波形参数结构体,以文本文件进行读入。在图10(b)雷达电磁对抗参数设置界面中,根据图8选择的干扰类型设置相应的干扰参数,并可根据仿真需要选择是否采用抗干扰措施和干扰抑制率的大小,其中常用的抗干扰措施包括频率捷变、频率分集、旁瓣对消、低副瓣天线、抗干扰波形等是以数字编号的组合形式进行读取。
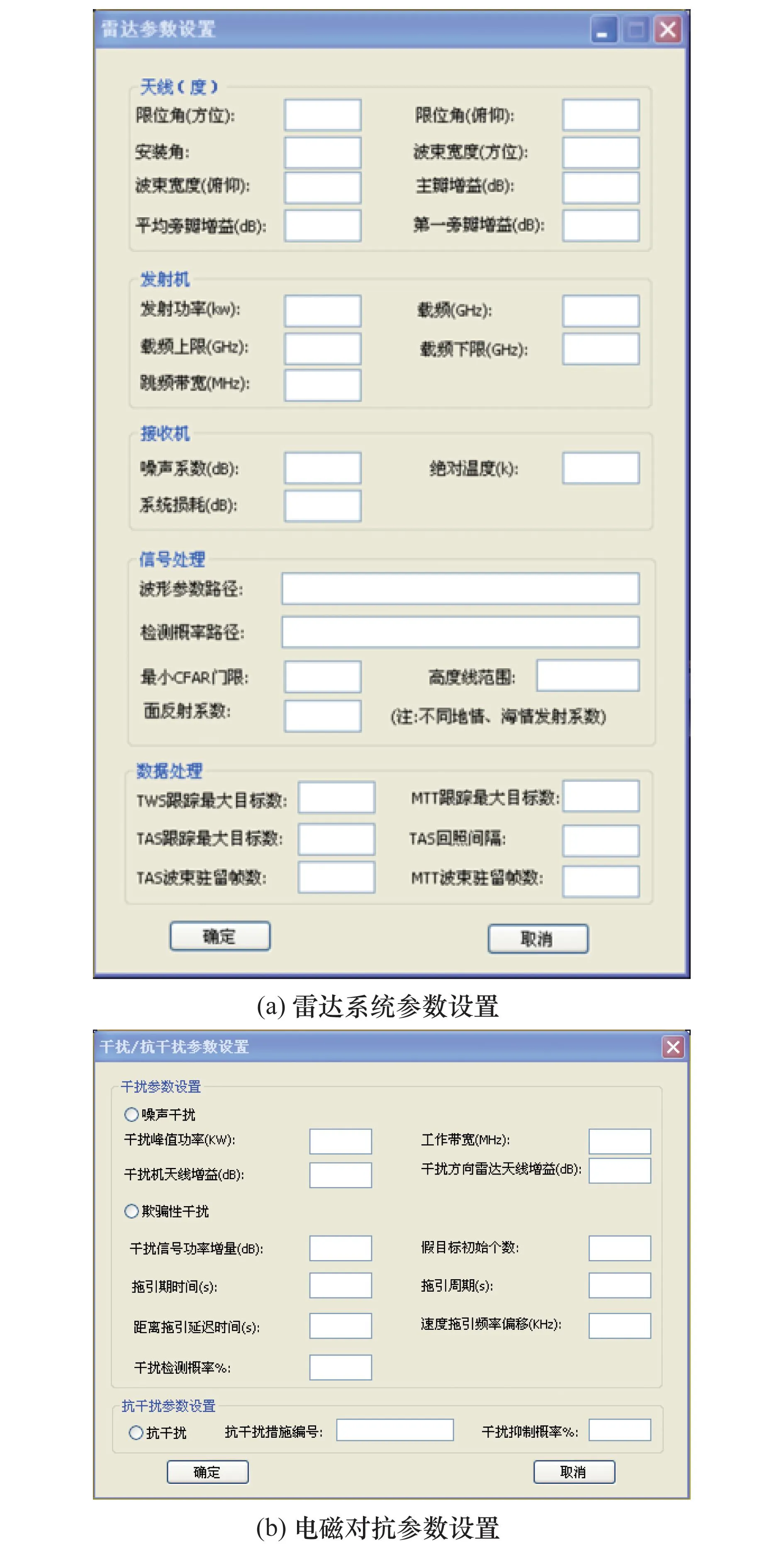
图10 雷达参数设置界面
3.3仿真分析
以对空状态为例,如图9所示,在雷达载机航向角为0°,距离为50~160 km范围内模拟4个空中目标,均匀分布在4个视线上,每个方向有1个目标,距离间隔为5 km,方位间隔为15o,起始距离为100 km,起始方位为25o,航速均为300 m/s,目标的航向及高度与视线的序号有关,偶数视线上目标航向角与视线方向相同,高度为4 km,奇数视线上目标航向角与视线方向相反,高度为6 km。机载雷达的方位扫描范围为[-30°,-30°],俯仰扫描线数为2,载机高度为5 km,载机地速为200 m/s,工作方式为边扫描边跟踪,其目标跟踪的结果如图11所示。由图11可以看出,雷达通过天线扫描、信号检测和目标跟踪等处理后,输出的径向距离、径向速度、方位角和俯仰角与实际目标观测值的误差小,并能稳定跟踪,可满足雷达精确跟踪的功能验证需求。此外为论证和分析其他滤波器和数据关联算法的性能,可将此模块的扩展卡尔曼滤波器和最近邻关联算法进行替换。

图11 雷达目标跟踪结果
本仿真系统还成功实现了雷达电磁干扰和抗干扰、RCS测量、功率管理、对地测高、对地目标跟踪、对海目标探测和跟踪等功能的仿真。图12为雷达采用抗干扰措施前后对抗欺骗式干扰的效果比较,其中红色圆点表示目标,红色直线代表机头方向,蓝色直线表示天线扫描波束。图12(a)中,天线扫描展示区左上部分的多个红色圆点显示为由1号目标欺骗干扰产生的多个假目标,由数据监视窗可以看出,跟踪系统结果输出有24个目标航迹,其中编号为6 001的假目标航迹有20个。采用频率捷变、低截获波形等抗干扰措施后的雷达跟踪效果如图12(b)所示。本机载雷达仿真器系统不仅可对现役和在研型号的机载雷达进行功能仿真和效能评估分析,通过对相应的子模型进行扩展,还可满足未来预研型号机载雷达功能仿真和效能评估的需求。

图12 雷达欺骗式干扰对抗效果比较
4结论
本文首先采用UML对机载雷达仿真系统结构进行了可视化建模。通过UML的顶层逻辑、运行状态、逻辑包和类设计等,优化了系统结构,增强了系统的可读性、可维护性和可扩展性。其次,对机载雷达系统功能模型的工作流程、目标检测、目标跟踪、误差模型和雷达电磁对抗模型进行了分析,逼真地模拟了实际机载雷达天线、信号处理机和数据处理机等分系统性能。最后,想定了仿真场景,设置了仿真环境,并基于上述机载雷达仿真系统进行仿真,仿真结果的分析充分表明了系统模型的可行性和有效性,为研究机载雷达系统的功能验证和效能评估提供了仿真依据和验证平台。
参考文献:
[1] Li L, Xie Y J, Li X F, et al. Pulse Doppler radar simulation system for detecting low altitude targets[J].SystemsEngineeringandElectronics,2010,32(6):1131-1135.(李磊,谢拥军,李晓峰,等.一种探测低飞目标的PD雷达仿真系统[J].系统工程与电子技术,2010,32(6):1131-1135.)
[2] Zhao F, Li D, Wang X S, et al. Missile defense radar simulation system[J].JournalofSystemSimulation,2004,18(5):1190-1194.(赵锋,李盾,王雪松,等.导弹防御雷达仿真系统[J].系统仿真学报,2006,18(5):1190-1194.)
[3] Guguen P,Lignoux C,Goumand D,et al. ASTRAD: simulation platform,a breakthrough for future electromagnetic systems development[C]∥Proc.oftheRadarInternationalConference, 2008: 1-5.
[4] Meurisse A, Guguen P, Reuillon P, et al. ASTRAD platform: a future reference in radar simulation[C]∥Proc.oftheRadarInternationalConference-SurveillanceforaSaferWorld, 2009:1-5.
[5] Zilu T, Xin Y Y. Study of common simulation platform of pulse-compression radar signal processing: a method of studying radar system[C]∥Proc.oftheInternationalConferenceonComputationalandInformationSciences, 2010: 424-427.
[6] Wang L, Chen J, Cao J S, et al. UML Modeling and development of airborne warning radar detecting process[J].SystemsEngineering—Theory&Practice, 2013, 33(8): 2156-2162. (王磊,陈杰,曹建蜀,等.机载预警雷达探测过程UML建模与系统实现[J].系统工程理论与实践,2013,33(8):2156-2162.)
[7] Cai W Y, Li X, Wan F B, et al. Research on modeling and simulation for radar early warning detection system[J].JournalofSystemSimulation, 2009, 21(3): 862-867. (蔡万勇, 李侠, 万凡兵,等. 雷达预警探测系统建模与仿真研究[J].系统仿真学报, 2009, 21(3):862-867.)
[8] Wendy B, Michael B.MasteringUMLwithrationalrose[M].San Francisco: Sybex Publishing Company, 2002.
[9] Yin Y F, Liu B, Lu M Y, et al.Test cases generation for embedded real-time software based on extended UML[C]∥Proc.oftheInternationalConferenceonInformationTechnologyandComputerScience, 2009: 69-74.
[10] Tsutomu O, Tsukasa K, Syuichi H,et al.An information system development method based on the link of business process modeling with executable UML modeling and its evaluation by prototyping[C]∥Proc.ofthe22ndInternationalConferenceonAdvancedInformationNetworkingandApplicationsWorkshops,2008:1057-1064.
[11] Vieira M, Dias M, Richardson D. Object-oriented specification-based testing using UML state-charts[C]∥Proc.oftheWorkshoponAutomatedProgramAnalysis,Testing,andVerificationinthe22ndInternationalConferenceinSoftwareEngineering, 2000: 758-761.
[12] Merrill I S.Introductiontoradarsystem[M].3rd ed.Boston: McGraw-Hill Publishing Company, 2001.
[13] Wu S J, Mei X C.Signalanddataprocessingtechnologyofradar[M].Beijing: Publishing House of Electronics Industry, 2008.(吴顺君, 梅晓春. 雷达信号处理和数据处理技术[M].北京:电子工业出版社, 2008.)
[14] Wood T M. Interacting methods for man-oeuvre handling in the GM-PHD filter[J].IEEETrans.onAerospaceandElectronicSystems, 2011, 47(4): 3021-3025.
[15] Liu C, Shui P, Li S. Unscented extended Kalman filter for carrier tracking algorithm[J].JournalofSystemsEngineeringandElectronics, 2011, 22(2): 188-192.
[16] Blackman S S. Multiple hypothesis tracking for multiple target tracking[J].IEEEAerospaceandElectronicSystemsMagazine, 2004, 19(1): 5-18.
[17] Ceccarelli N, Scortecci F, Garulli A. Comparison of EKF and UKF for spacecraft localization via angle measurements[J].IEEETrans.onAerospaceandElectronicSystems, 2011, 47(1): 75-84.
[18] Zhao G Q.PrincipleofradarECM[M].Xi’an: Xidian University Press, 2005.(赵国庆.雷达对抗原理[M].西安: 西安电子科技大学出版社, 2005.)
熊伟(1984-), 男,高级工程师,博士研究生,主要研究方向为雷达系统仿真、雷达目标检测与识别。
E-mail:xiongweiwhumath@sina.com
高霞(1984-),女,工程师,硕士,主要研究方向为雷达系统仿真、气象雷达目标探测。
E-mail:gx-1984@163.com
王力(1984-),男,工程师,硕士,主要研究方向为雷达系统仿真、目标跟踪。
E-mail:wang_li_apple@163.com
杨万扣(1979-),男,副教授,博士,主要研究方向为模式识别、计算机视觉、系统仿真。
E-mail:youngwankou@yeah.net

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141022.1310.002.html
Modeling and simulation of universal airborne radar
simulator system based on UML
XIONG Wei1,2, GAO Xia2, WANG Li2, YANG Wan-kou1
(1.CollegeofAutomation,SoutheastUniversity,Nanjing210096,China; 2.LeihuaElectronic
TechnologyInstitute,AviationIndustryCorporationofChina,Wuxi214063,China)
Abstract:A modularized, expandable and universal system structure of the airborne radar functional simulator is proposed based on unified modeling language (UML), which is consisted with four modularization designed objects, including system control, antenna, signal processing machine and data processing machine. The universal airborne radar simulator has the simulation ability of pulse Doppler radar and phased array radar. Then, the work flowchart, target detection model, target track model, error analysis model and electronic counter-countermeasure model of the airborne radar simulation system are established and analyzed in detail. Finally, the simulation model is carried out with the visual C++ language, which results verify the feasibility and efficiency. The successful exploitation of the airborne radar simulator will supply the platform and basis for functional validation and efficiency evaluation of airborne radar.
Keywords:airborne radar; simulator system; system modeling; unified modeling language (UML)
作者简介:
中图分类号:TN 95
文献标志码:A
DOI:10.3969/j.issn.1001-506X.2015.07.12
基金项目:国家高技术研究发展计划(863计划)(2013AA7042013)资助课题
收稿日期:2014-07-08;修回日期:2014-09-05;网络优先出版日期:2014-10-22。
