三相交错并联同步Buck的光伏充电控制器*
2016-01-26杜旭冉鲍建宇
杜旭冉,鲍建宇
(1.太原科技大学,太原 030024;2.浙江大学)
* 基金项目:宁波市工业择优委项目(2011B1002)。
杜旭冉1,鲍建宇2
(1.太原科技大学,太原 030024;2.浙江大学)

* 基金项目:宁波市工业择优委项目(2011B1002)。
摘要:针对光伏发电系统中太阳能电池利率低、蓄电池常因充电不当而损坏的问题,分析了光伏电池的输出特性和蓄电池的充电特性。设计了一个具有最大功率点跟踪(MPPT)的光伏充电控制器系统,并搭建了硬件平台。该系统以dsPIC33F16GS502为主控MCU,采用三相交错并联同步Buck电路为充电主电路。软件编程采用4阶段充电策略对蓄电池进行充电控制,实现了蓄电池在MPPT、恒流、恒压不同充电方式之间的智能切换。其中恒流恒压充电阶段采用了PI算法,快充阶段使用了基于改进的扰动观察法和电导增量法相结合的算法。实验结果表明,最大功率点跟踪能快速跟踪外界环境的变化,并稳定在最大功率点,提高了光伏电池的使用效率,保护了蓄电池,延长了蓄电池的使用寿命。
关键词:光伏发电;MPPT;三相交错并联同步Buck;dsPIC33FJ16GS502
引言
随着当今世界能源危机和环境污染的日益严重,太阳能作为一种新型的绿色可再生资源受到越来越广泛的重视,但是太阳能电池阵列由于受到光照强度、环境温度、负载的影响,输出电压和电流不断变化。为了充分利用太阳能,最大程度地提高光伏电池的转换效率,必须采取措施对光伏电池的输出功率加以控制,保证工作在最大功率点。
目前常用的最大功率跟踪MPPT(Maximum Power Point Tracking)控制方法主要有恒压法、扰动观察法[1]、电导增量法[2]、模糊逻辑控制法[3]等。本文在分析传统MPPT算法缺点的基础上,提出了一种改进的扰动观察法和增量电导法相结合的新型的MPPT算法。研究了高效率三相交错并联同步Buck整流技术,设计了一个太阳能智能充电控制器系统,不断采集光伏电池电压、电流、蓄电池端电压、电流。根据蓄电池端电压的高低按涓充、快充、过充和浮充4阶段进行充电控制,以实现蓄电池在不同充电方式之间的智能切换和能量管理。研究结果表明,该控制器在充分利用太阳能的同时兼顾了蓄电池本身的充电特性,具有较高的工作效率。
1系统简介及工作原理
光伏发电是利用太阳能电池将太阳光辐射能量转化为电能的直接发电方式。太阳能充电控制器系统主要包括太阳能电池板、DC-DC变换器、蓄电池、dsPIC33FJ16GS502控制电路、驱动电路以及采样电路等。系统框图如图1所示。
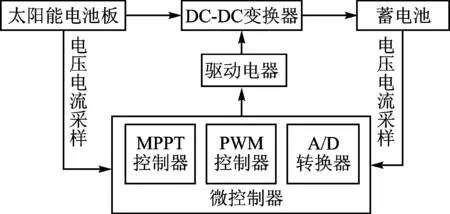
图1 太阳能光伏发电系统框图
系统运行原理如下:在太阳光的照射下,太阳能电池利用光生伏打效应产生电能。dsPIC33FJ16GS502控制电路是整个系统的核心,通过采样电路采集光伏电压Upv、光伏电流Ipv、蓄电池电压Ubat、蓄电池充电电流Ibat,以此判断蓄电池所处的充电状态,根据不同的充电状态,采用相应的充电算法控制PWM波的占空比,经过驱动电路调节同步BUCK电路功率管的占空比,对蓄电池进行充电。
1.1三相交错并联同步整流Buck变换器
DC-DC变换器采用的是三相交错并联同步Buck拓扑。 三相交错并联是指三相Buck电路并联且相互交错工作,工作时每路同频率不同相位,各相两两相差120°,开关管交替工作,降低了器件功率损耗。当电源装置的输出功率较大时,采用多个变换器并联,交错并联技术很大程度上减小了流过每一个导通电路中的电流,降低了开关的损耗和输出总电流纹波。电感和电容参数取值相应的减小使得电路体积变小、重量减轻、功率密度则变大。在电压低、负载电流很大的情况下,同步Buck变换器的整流效率要比异步Buck变换器的整流效率来高,因为此时电流比较大。导通功耗起主要的作用,续流二极管的损耗相对较大,本文采用导通电阻较小的MOSFET来代替二极管采用同步整流技术,以防止开关管同时导通或者中间留有一定的死区。
1.2光伏电池输出特性
100W光伏电池在标准测试条件下的典型输出特性曲线如图2所示。光伏电池既非恒压源又非恒流源,其P/U曲线是一个单峰值曲线,输出功率随输出电压的变化而变化,中间存在一个最大值点,即最大功率点(MPP)。
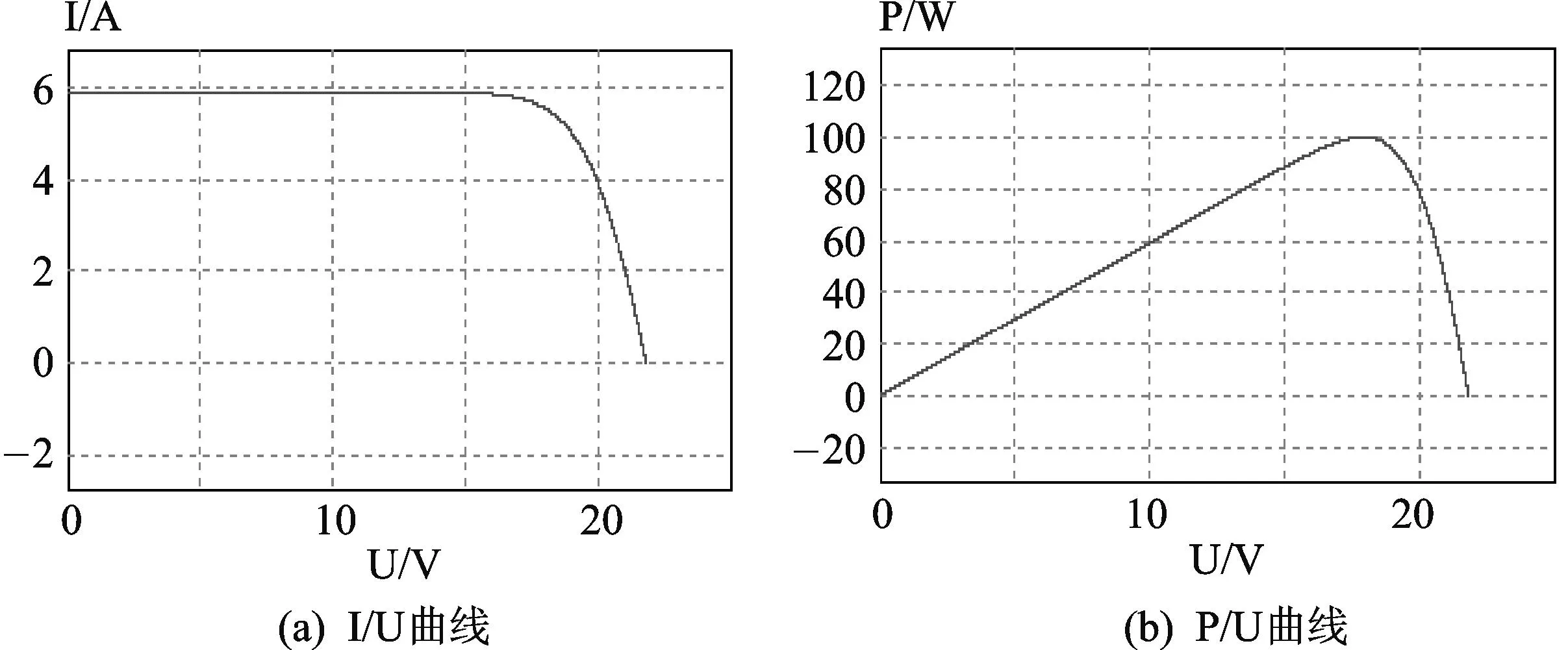
图2 太阳能特性曲线
2硬件设计
2.1主电路设计
主电路采用三相交错并联同步Buck电路拓扑,如图3所示。
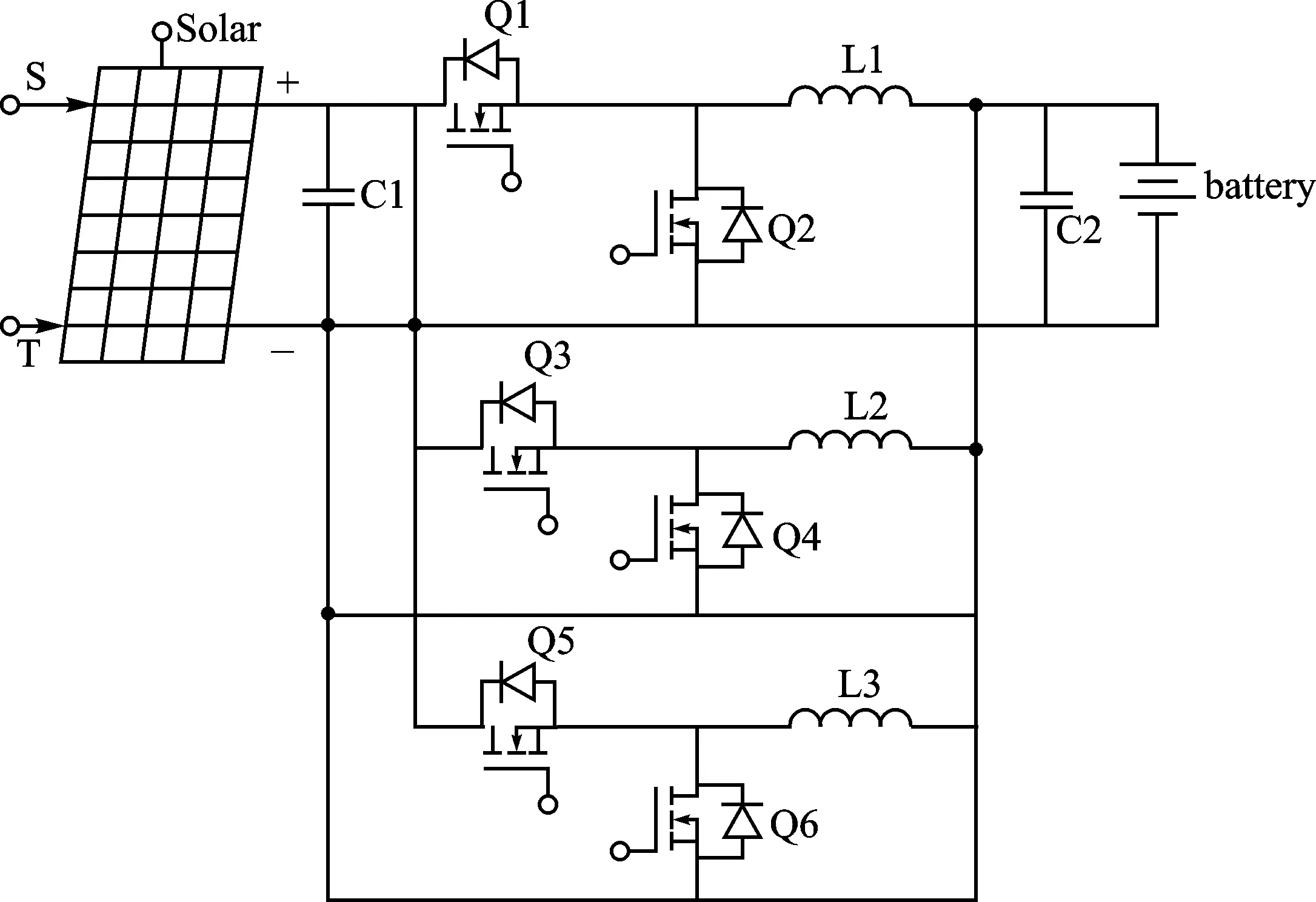
图3 主电路原理图
图3为主电路原理图,图中Q1、Q2、L1组成一路Buck电路,同理Q3、Q4、L2为第二路单独的Buck电路,第三路Buck由Q5、Q6、L3组成。3路同步Buck采用并联的方式接入电路,用于实现电路降压目的,其中L1、L2、L3为150 μH,功率管采用IRFB4321,开关频率为100 kHz。输入电容C1=330 μF,有两个作用:一是使太阳能电池输出电流保持连续,二是在恒流充电时为电感提供纹波能量。输出电容C2=470 μF,主要作用是恒流充电时,吸收电感电流纹波。
2.2控制电路设计
控制电路主要由dsPIC33FJ16GS502的最小系统组成,包括复位电路、晶振电路、供电电源电路、下载调试电路,及相应的信号输出/输入接口。
为了使dsPIC33FJ16GS502最小系统正常工作,采用3.3 V供电方式,由LM5022构成的升压降压电路可以将输入电压转换为12 V输出,然后由LM2734Y转换为5 V,ASM1117把5 V最终转换为3.3 V给单片机供电。
下载调试电路采用微芯公司集成仿真器ICD3,ICSP是单片机的在线串行编程接口,通过接单片机引脚PGEC和PGED引脚实现。控制器电路总体硬件框图如图4所示。
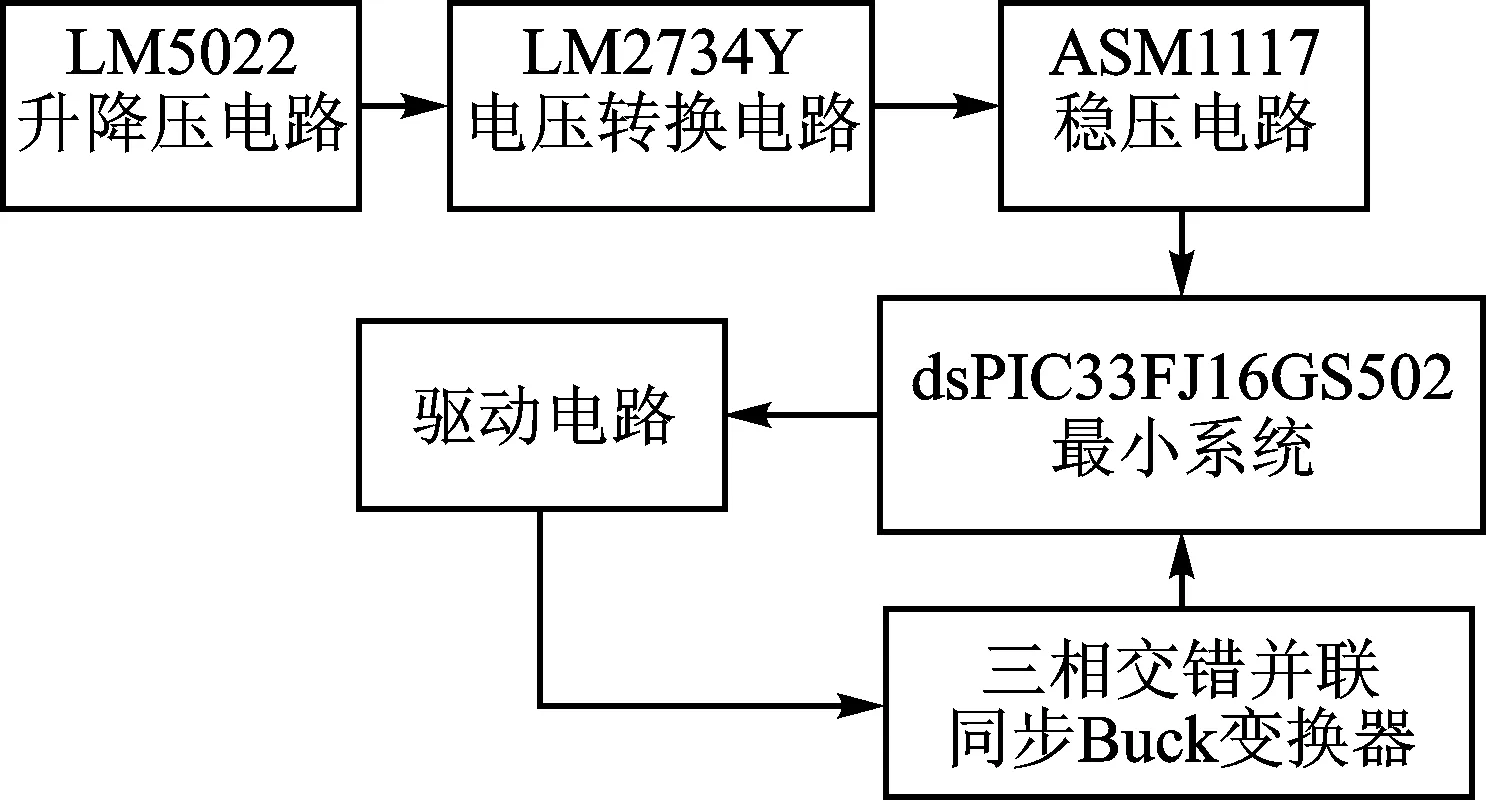
图4 控制器总体硬件框图
2.3驱动电路设计
图5为MOS管的专用芯片驱动,由二极管电容和IR2181推挽式驱动器组成,每一组MOS管需要一组同样的驱动器来进行驱动,图5中仅为单路Buck电路的专用驱动器。IR2181推挽式驱动器具有电压高、放大率高的MOS场效应管和带有独立的推挽放大器,工作方式为自举,门驱动器的供电范围为10~20 V。图中HO口向MOS管发送高电平,LO口向MOS管发送低电平,形成互补。
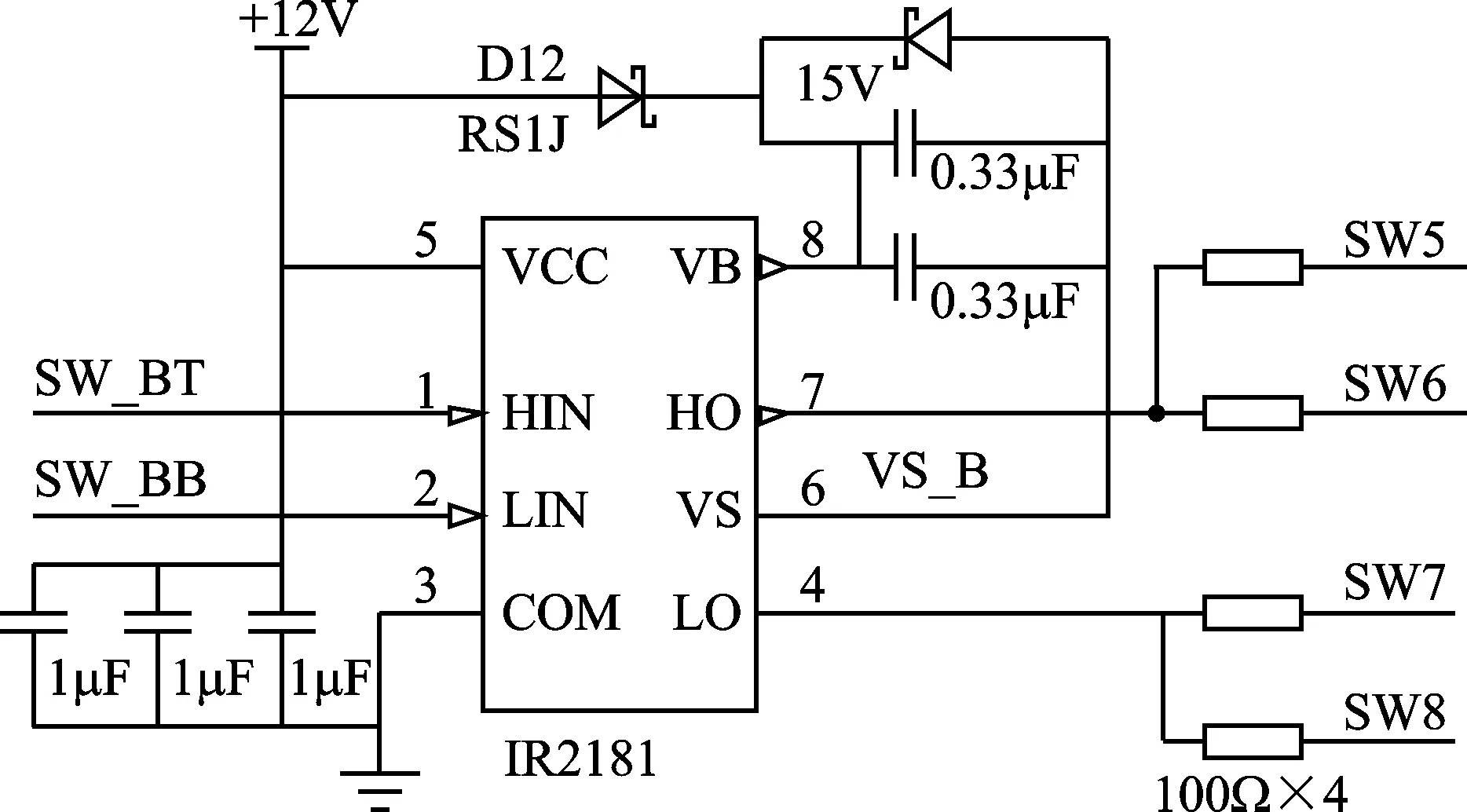
图5 驱动电路图
3软件设计
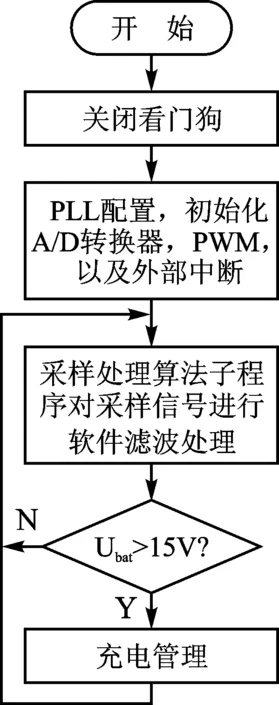
图6 主程序流程图
软件设计包括采样处理、控制算法、蓄电池充电管理和PWM驱动输出。系统主程序流程图如图6所示。
3.1主程序设计
系统上电后首先关闭看门狗,初始化程序完成PLL、A/D转换器、PWM以及其他中断的初始化,判断充电条件,然后通过定时中断、采样中断及各个功能实现子程序完成系统的MPPT、蓄电池充电管理等。
3.2充电控制策略
好的充电策略是提高系统效率和可靠性的有效手段,本文采用了4阶段充电法。
阶段1:蓄电池电压 UBAT小于 11 V。此时,蓄电池已深度放电,为延长蓄电使用的池使用寿命,采用MPPT和恒流相结合的充电方式对蓄电池充电。如果光照不够强,充电电流很有可能小于0.5 A,采用 MPPT 方式充电,而如果光照足够强,则采用恒定电流控制,使充电电流恒定为0.5 A。
阶段2:蓄电池电压UBAT大于 11 V 但小于 14.5 V。在这个阶段,采用 MPPT 方式对蓄电池充电,充电电流较大且不断变化,是蓄电池的主充电阶段。
阶段3:恒压限流充电。该阶段充电值恒为14.5 V,随着蓄电池内部的电化学反应的进行,充电电流逐渐减小,当充电电流下降到约0.01 C时,终止恒压充电,进入浮充阶段。
阶段4:浮充电。以一个略小于恒压充电的电压对蓄电池充电,此阶段主要用来补充蓄电池自放电所消耗的损失,标志着充电过程的结束。
上面使用的 11 V 和 14.5 V 是典型 12 V 铅酸蓄电池的特性参数,基于它们可以定义各个充电阶段的临界值。充电流程图如图7所示。
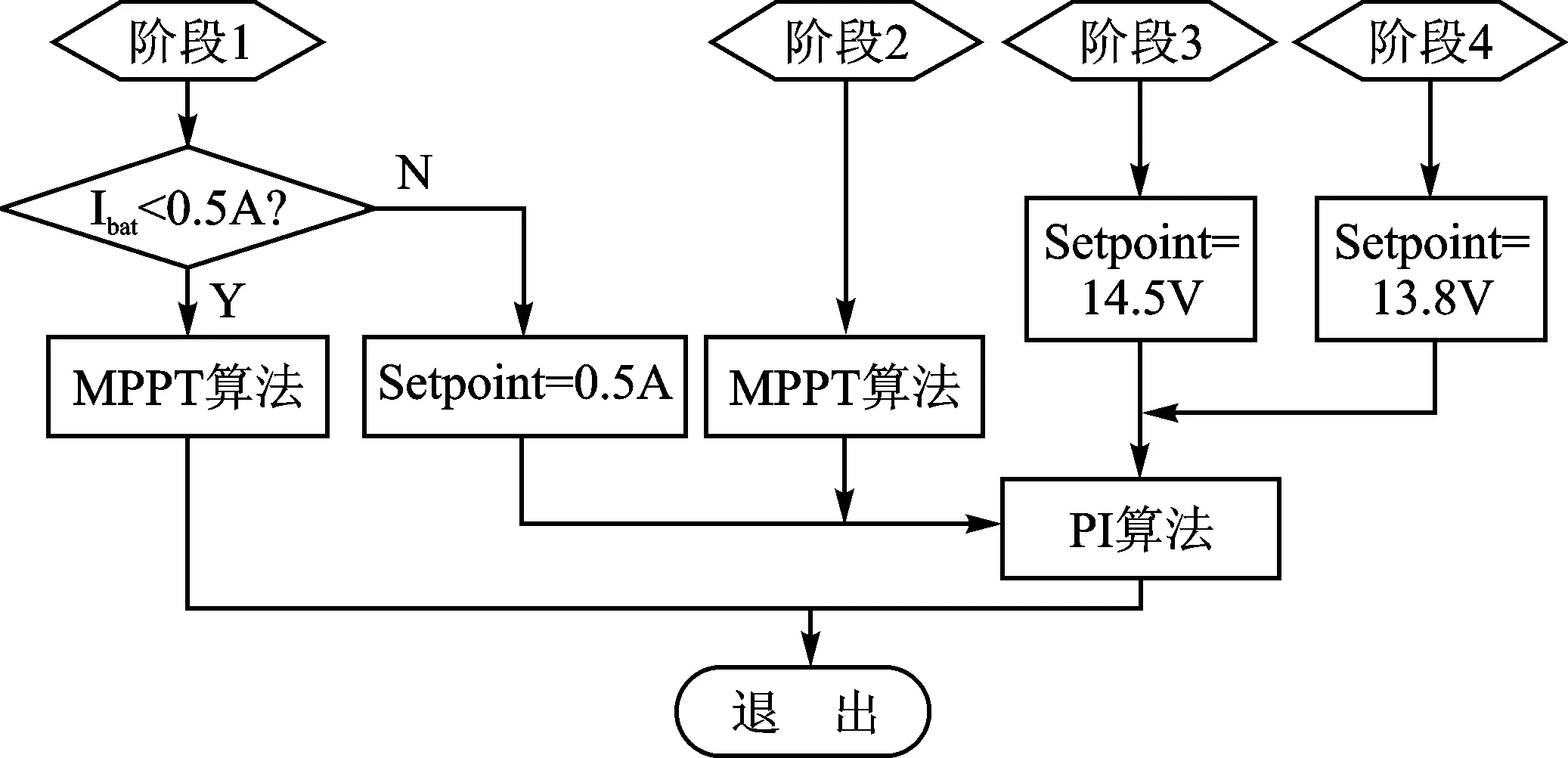
图7 改进的四阶段充电流程图
3.3MPPT算法设计
常用的MPPT算法中,使用较多的是扰动观察法和电导增量法。本文采用改进的扰动观察法和电导增量法相结合的方式,太阳能电池的短路电流和外界光强之间近似的成比例关系,光强越强短路电流越大,反之越小。因此通过判断工作点的电流就可以判断出当时的光强强度。通过这种方法可以根据光强的强弱来采用不同的控制策略,当光强达到一定强度时候采用增量电导法,当光强较弱时候采用改进的扰动观察算法[4]。
改进的扰动观察法如下:当光伏电池的输出功率变化量较大时,选取较大的扰动量,有利于快速跟踪到算法的MPPT点附近,此时功率的变化量较小,再利用小扰动量保证算法的精度,减小能量损耗。具体措施为:对每次扰动后的输出功率变化量进行判断,如果功率变化量大于某规定的值,则采用大步长扰动,否则采用小步长扰动,定义该值为算法的阈值Pth。
4实验结果
4.1系统硬件平台实物图
系统的硬件平台主要包括MPPT太阳能控制器、太阳能电池板、铅酸蓄电池以及其他调试设备,如图8所示。

图8 系统硬件实验平台
光伏电池的额定功率为100 W,开路电压22.12 V,短路电流为5.6 A,待充的蓄电池为12 V铅酸蓄电池,三相同步整流BUCK为电流连续工作模式(CCM)。
4.2蓄电池充电整个过程的实验曲线图
图9为12 V蓄电池充电过程中电压U和电流I的变化曲线。充电初期使用MPPT和恒流相结合的充电方式,当蓄电池电压升高到10.9 V后,用最大功率对蓄电池充电,直到蓄电池电压为14.4 V时转为恒压充电,充电电流逐渐减小,当为0.1 A时转为浮充,浮充电压为13.8 V。由图9可知,该光伏充电系统实现了对蓄电池的4阶段充电。
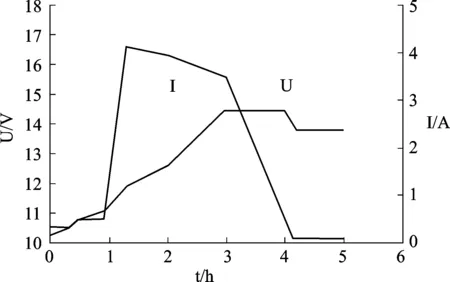
图9 蓄电池充电曲线
4.3转换效率
系统工作于MPPT阶段时的电压电流效率数据如表1所列。
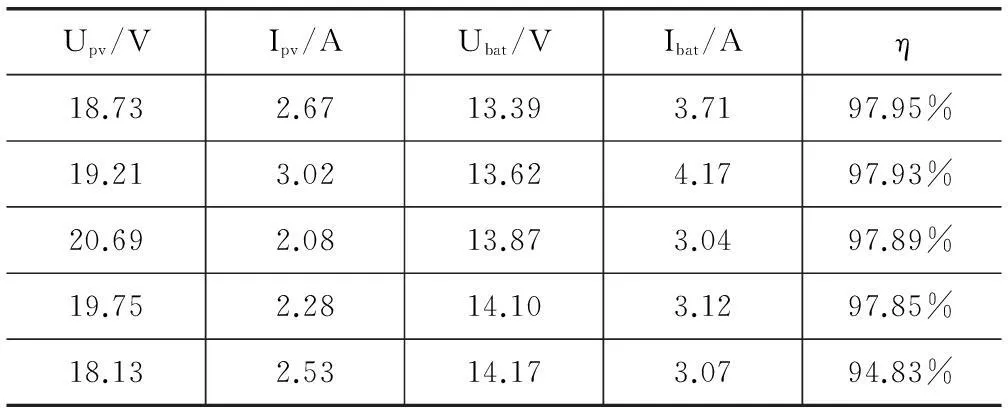
表1 MPPT充电阶段的转换效率
从表1中可以看出,5组实验数据比较接近,三相交错并联同步Buck充电器的平均效率可达97.29%。
结语
该实验验证了基于三相交错并联同步Buck的太阳能充电控制方案的可行性。该方案在充分利用太阳能电池的同时,满足了蓄电池的充电特性,实现了4种充电方式之间的全自动智能切换和能量管理。在充电过程中融入了基于改进的扰动观察法和电导增量法的MPPT算法,能快速响应外界环境的变化,取得了良好的效果,同时保护了蓄电池,延长了蓄电池的使用寿命。

参考文献
[1] 刘莉,张彦敏.一种扰动观察法在光伏发电MPPT中的应用[J].电源技术,2010,134(2):186-189.
[2] PAN Iun, WANC Cheng-hua, HONG Feng.Research of photovoltaic charging system with maximum power point tracking[C]//The ninth International Conference on Elec-tronic Measurement & Instruments, Beijing,2009.
[3] 杨自娟.基于模糊控制的太阳能MPPT充电器的研究与实现[D].广州:华南理工大学电力学院,2010.
[4] 张永辉.MPPT太阳能控制器设计[D].哈尔滨:哈尔滨工业大学,2009.
杜旭冉(硕士研究生),主要研究方向为嵌入式控制系统及应用;鲍建宇(博士),主要研究方向为电力电子技术。
征订启事
《单片机与嵌入式系统应用》为中国科技核心期刊(月刊),每月1日出版。邮发代号:2-765。每期定价12元,全年144元(若经本刊邮购每期另加邮资2元)。
欢迎广大读者订阅。
地址:北京市海淀区学院路37号《单片机与嵌入式系统应用》杂志社
邮编:100191 电话:010-82338009 传真:010-82317043
开户银行:北京银行学院路支行
户名:《单片机与嵌入式系统应用》杂志社有限公司
账号:010903391001201110299-36
网址:www.mesnet.com.cn
Email:mesnet@mesnet.com.cn

Du Xuran1,Bao Jianyu2
(1.Taiyuan University of Science and Technology,Taiyuan 030024,China;2.Zhejiang University)
Abstract:Aiming at the problems of under utilization of photovoltaic panels and damage of batteries caused by misuse in photovoltaic power generation system,a photovoltaic charging controller with maximum power point tracking is designed after analyzing the photovoltaic panel output characteristics and charging characteristics.The system takes the dsPIC33F16GS502 as the core,and adopts three-phase interleaved synchronous Buck circuit as its main charging circuit.The four-stage charging method is used to control the battery charging,and the intelligent switch between MPPT,constant current and constant voltage is achieved using the software program.The experimental results indicate that the system can track the maximum power point quickly,the efficiency of PV array can be improved,the life span of the battery can be prolonged.
Key words:photovoltaic charging;MPPT;three-phase interleaved synchronous Buck;dsPIC33FJ16GS502
收稿日期:(责任编辑:杨迪娜2015-07-01)
中图分类号:TP17
文献标识码:A