双馈风力发电系统新型高阶滑模控制
2016-01-26刘海营
刘海营,管 萍
(北京信息科技大学 自动化学院,北京100192)
双馈风力发电系统新型高阶滑模控制
刘海营,管萍
(北京信息科技大学 自动化学院,北京100192)
摘要:双馈风力发电系统采用传统矢量控制时,利用PI控制器,但此控制器不易调节参数,动态性能和鲁棒性较差。为改善控制器性能,提出一种新型高阶滑模控制器,明显改善传统滑模控制的抖振现象,将高阶滑模控制与传统矢量控制相结合应用到双馈风力发电系统功率控制中。仿真结果表明,高阶滑模控制器相比传统PI控制器,具有更好的动态性能,鲁棒性更强。
关键词:双馈风力发电系统;二阶滑模控制;功率控制
中图分类号:TP391.9
文献标识码:A
DOI:10.3969/j.issn.1672-0792.2015.10.002
收稿日期:2015-07-21。
作者简介:刘海营(1988-),男,硕士研究生,研究方向为双馈风力发电系统控制,E-mail:1176718341@qq.com。
Abstract:The PI controller is used in the traditional vector control system for the doubly fed wind power generation system, but it is not easy to adjust the parameters with the controller, and the dynamic performance and robustness are poor. In order to improve the control performance of the controller, a new high order sliding mode controller was designed in this paper to improve the chattering phenomenon of conventional sliding mode control, then the control strategy of combining high-order sliding mode control with the traditional vector control was applied to the doubly fed wind power generation system control. The simulation results show that the high order sliding mode controller has better dynamic performance and stronger robustness than the conventional PI controller.
Keywords:double-fed induction generator system;second-order sliding-model control (2-SMC);power control

0引言
随着国内风力发电技术的迅猛发展,用双馈风力发电系统实现变速恒频的发电模式,以其优越的性能得到广泛的推广应用[1]。
在大多数变速恒频双馈电机控制中,一般采用定子磁链定向的同步旋转dq坐标系中的矢量控制策略,但是其变换过程较为复杂,需要对定子磁链进行观测,本文采用定子电压定向,可直接采用测得的电网电压来计算坐标变换所需的角度,省去磁链观测器,简化了控制结构。且传统的控制器通常采用PID调节器,对电机参数摄动和负载扰动非常敏感,系统的动静态性能有待于改善。文献[2~4]将滑模控制策略应用到变速恒频双馈风力发电机,能明显改善电机内部参数摄动以及外部干扰对整个风力发电系统的影响,具有一定的鲁棒性,但是常规滑模抖振现象严重,亟待改善。本文在双馈电机定子电压定向矢量控制策略的基础上,提出了一种基于super-twisting算法的二阶滑模控制,将此控制算法和矢量控制相结合,应用到双馈电机功率控制中,相比于传统的PI控制器,具有动态响应快、抗干扰、对参数变化鲁棒性更强。
1风力机特性
由风力机空气动力学可知,风力机捕获的机械功率为:
(1)
式中:ρ为空气密度;S为风力机迎风扫掠面积;v为主导风速;Cp为风能利用系数。
大多数风力发电机组的风能利用系数Cp由如下经验公式计算得到[2]:

(2)

(3)
式中:R为叶片半径;ω为叶片旋转角速度。为了充分利用风能,低于额定风速时,令β=0,跟踪最佳风能利用系数曲线,实现最大风能追踪。
2双馈电机数学模型
双馈电机均采用电动机惯例,则定转子同步旋转dq轴坐标系的模型如下[3]:
定转子电压方程:
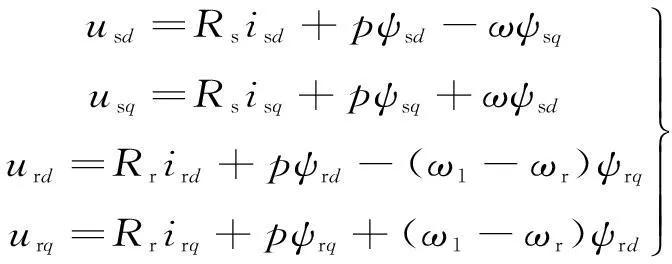
(4)
定转子磁链方程:
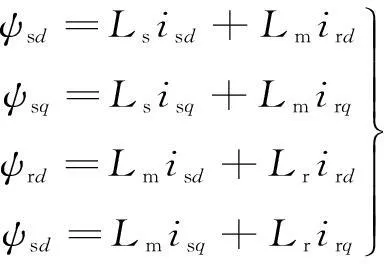
(5)
电磁转矩方程:

(6)
双馈电机采用定子磁链定向矢量控制时,控制系统易受电机参数影响,并且并网控制时无功补偿能力会受到系统稳定性的限制。因此,为提高系统鲁棒性,增强整个系统无功补偿能力,本文采用定子电压定向,即将同步旋转坐标系的d轴定向于定子电压矢量Us上,有如下表达式成立:
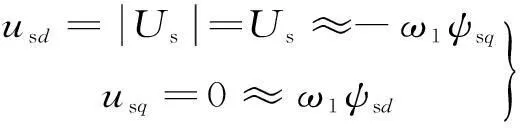
(7)
即有
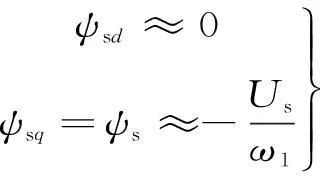
(8)
转子电压方程为
(9)
将式(7),(8)代入(4)得:
(10)
将式(10)代入(9)得转子电压另一种形式,用于后续控制器设计:
(11)
定子有功功率和无功功率表达式:

(12)
式中:Ps,Qs分别为定子有功功率、无功功率;us为定子电压幅值;ψs为定子磁链值。
3滑模控制器设计
3.1 二阶滑模控制
滑模控制具有设计简单、鲁棒性强等优点。然而,传统的滑模控制的不连续的控制律是直接作用在时间的一阶导数的滑动面上,具有不连续性。由于系统的未建模部分和开关的非理想特性,传统的滑模控制存在抖振现象,这阻碍了它的实际应用。为了减轻抖动的影响,最有效的方法是采用高阶滑模。高阶滑模控制的基本思想是作用在高阶时间导数的滑模面上,使得滑模面的一阶时间导数是连续的,因此,抖振现象在理论上可以完全消除。此外,高阶滑模控制在保留传统滑模控制性能的基础上,提高了控制精度。
在本文中,采用基于super-twisting(超扭曲)算法的二阶滑模控制方法,来控制转子侧逆变器实现功率调节的目的。super-twisting算法相比于其他高阶滑模的算法具有如下优点:①它不需要滑动变量的时间导数信息;②当系统相对阶为1时,超扭曲算法可以直接应用,不需要引入新的控制变量。超扭曲算法的形式可以表示为[5]:
(13)
假定存在一个正实数φ满足:
(14)
参数k1,k2调节时要满足如下不等式:
(15)
3.2 转子侧控制器设计
转子侧逆变器的控制,一方面是为了实现在变速恒频条件的最大风能追踪控制,最大限度的转化风能,实现功率的跟踪控制;另一方面通过调节无功功率,保证风电系统并网的稳定运行,本文主要针对功率跟踪控制设计二阶滑模控制器。
选择切换面的原则是:保证系统在滑动模态运动时,系统具有良好的动态性能且是渐近稳定的。按照这一原则,本文采用super-twisting算法构造如下滑模面:
(16)
把式(16)代入式(11)、(12)结合式(8)得切换变量的时间导数如下:
(17)
双馈电机定子有功功率和无功功率是通过转子侧逆变器的交流端电压来调节的。因此,选择转子侧逆变器的交流端电压为控制器输出量,即urd,urq。由式(17)推导出如下关系式:
(18)
由相对阶的定义知,从式(18)可以看出双馈风力发电机模型相对阶为1,因此,可以将二阶滑模控制中应用到双馈风力发电系统中[6]。二阶滑模控制能消除抖振现象和提高控制精度,本文中将二阶滑模控制应用到转子侧逆变器的交流端电压调节中,选用如下形式的控制律[7]:
(19)

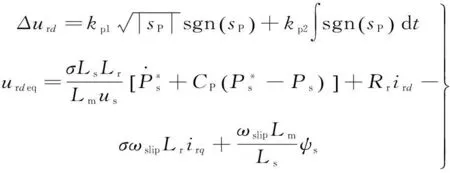
(20)
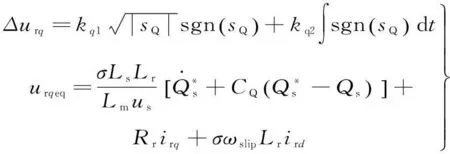
(21)
式中:kp1,kp2,kq1和kq2为可调节的正实数。转子侧逆变器二阶滑模控制器的控制框图如图1所示。
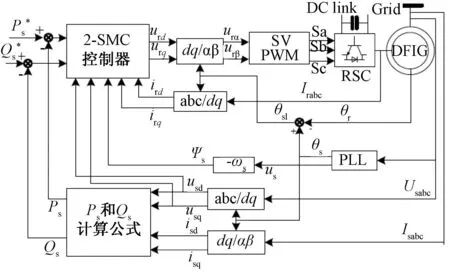
图1 转子侧逆变器二阶滑模控制原理图
4仿真研究及分析
4.1 仿真参数
(1)双馈发电机参数
双馈电机额定功率为15 kW,额定频率为50 Hz,定子绕组电阻值为0.379 Ω,转子绕组电阻值为0.314 Ω,定子绕组电感值为0.043 8 H,转子绕组电感值为0.044 9 H,互感值为0.042 7 H,转子转动惯量为0.39 kg·m2。
(2)控制器参数值
PI控制器:外环比例、积分系数分别为4,20;内环比例、积分系数分别为4,100。
二阶滑模控制器:CP=2,kp1=0.1,kp2=3;CQ=2,kq1=0.1,kq2=3。
4.2 仿真分析
本文在MATLAB/SIMULINK中建立相应的仿真模型,以跟踪正弦规律变化的功率值为例,分别对PI控制器和二阶滑模控制器进行了仿真研究,跟踪效果及跟踪误差如图2~5所示。
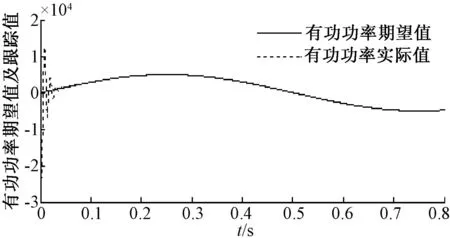
图2 PI控制效果
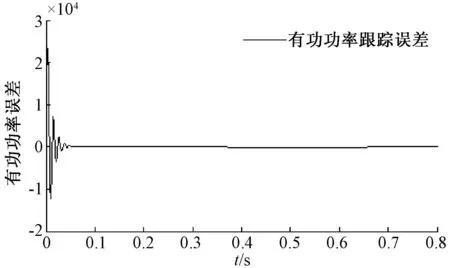
图3 PI控制误差
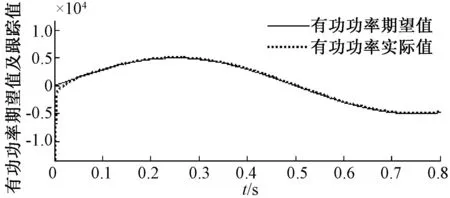
图4 二阶滑模控制效果
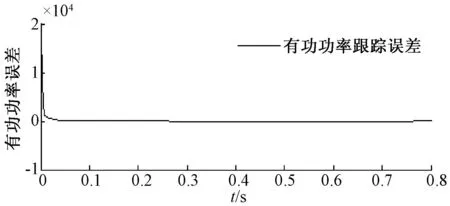
图5 二阶滑模控制误差
通过图2和图4对比知,二阶滑模控制动态性能良好,能迅速跟踪给定功率值,证明所设计控制器正确,具有良好控制效果。
5结论
本文在对传统变速恒频双馈风力发电系统分析的基础上,采用了定子电压定向的矢量控制思想,将基于super-twisting算法的二阶滑模控制应用到双馈发电机功率控制中,简化了控制结构,改善了控制性能。仿真结果表明,该控制策略具有较好的动态和稳态性能。
参考文献:
[1]陈仲伟,邹旭东,陈耀红,等.带储能的双馈风力发电系统控制策略[J].电力系统自动化,2014,38(18):1-5.
[2]王君瑞.双馈风力发电机滑模变结构直接功率控制[J].电气传动,2014,44(5):44-47.
[3]金博,邱道尹.积分滑模变结构双馈风力发电机控制[J].郑州轻工业学院学报(自然科学版),2014,29(2):44-48.
[4]薛花,王育飞.基于无源性的双馈感应风力发电系统自适应滑模控制方法[J].电机与控制学报,2014,18(8):43-48.
[5]Evangelista C, Puleston P, Valenciaga F.Active and reactive power control for wind turbine based on a MIMO 2-sliding mode algorithm with variable gains[J].Transactions on Energy Conversion,2013,28(3):682-689.
[6]Bartolini G, Ferrara A, Levant A, et al. On second order sliding mode controllers[J]. Lecture Notes in Control and Information Science, 2007, 247:329-350.
[7]Utkin,Vadim.Sliding mode control in electro-mechanical systems[M].London:CRC Press,1999.25-30.
New Higher Order Sliding Model Control for Doubly Fed Wind Power Generation System
Liu Haiying, Guan Ping(School of Automation,Beijing Information Science and Technology University,Beijing 100192,China)