利用升降轨道SAR数据获取DEM的试验研究
2016-01-26刘书军张鹏程
王 琴,陈 蜜,,刘书军,张鹏程
(1. 首都师范大学三维信息获取与应用教育部重点实验室,北京 100048;
2. 北京市城市环境过程与数字模拟国家重点实验室培育基地,北京 100048;
3.首都师范大学资源环境与旅游学院,北京 100048)
DEM Acquisition Study Using Raise-orbit and Lower-orbit SAR Data
WANG Qin,CHEN Mi,LIU Shujun,ZHANG Pengcheng
利用升降轨道SAR数据获取DEM的试验研究
王琴1,陈蜜1,2,刘书军2,张鹏程3
(1. 首都师范大学三维信息获取与应用教育部重点实验室,北京 100048;
2. 北京市城市环境过程与数字模拟国家重点实验室培育基地,北京 100048;
3.首都师范大学资源环境与旅游学院,北京 100048)
DEM Acquisition Study Using Raise-orbit and Lower-orbit SAR Data
WANG Qin,CHEN Mi,LIU Shujun,ZHANG Pengcheng
摘要:首先介绍了利用InSAR技术提取DEM的原理及方法,其次对利用ENVISAT卫星的升轨SAR数据和降轨SAR数据获取DEM,然后对其融合,并将融合前后的DEM与SRTM3 DEM进行比较,分析其精度。结果表明,与单独利用升轨SAR数据或降轨SAR数据获取的DEM相比,融合后的DEM能更好地显示地形起伏特征,高程精度得到明显提升,且羽化融合后的DEM精度最高,其与参考DEM─SRTM3 DEM高程差异标准差为±7.25,高程差异绝对值小于15 m的地区占95.48%。
关键词:InSAR;SRTM;羽化;均值;最佳分辨率;精度
一、引言
数字高程模型(digital elevation model,DEM)作为地球空间信息框架的基本内容和进行地形分析的核心数据,在气象、水文、地质地貌、工程建设、通信、军事等国民经济和国防建设,以及人文和自然科学领域发挥着越来越大的作用,具有很高的应用价值[1]。为了实现利用DEM对区域地形表面的数字化表达,国内外研究人员一直在不断地进行研究,以求在尽可能短的时间内获取大面积、高质量的地形信息[2]。随着科学技术的不断发展,对高质量地形信息的研究无论是从广度上还是深度上都有了很大的推进。特别是近20年来,合成孔径雷达干涉测量(interferometric synthetic aperture radar,InSAR)技术的迅速发展,使快速高效地获取大面积、高质量的DEM数据成为可能,为获取地球表面的地形信息提供了一种全新的高精度测量方法,是雷达遥感研究的一个新动向。
目前,利用InSAR技术获取DEM在国内的许多地区已经有了成功的应用,显示了这种方法对于获取高精度DEM具有重大意义。根据干涉雷达的视线向模糊问题可知,干涉雷达直接观测到的数据并不是地面的真实形变,而是各个方向形变投影到雷达脉冲入射方向(LOS)的形变矢量[3]。而且干涉雷达对不同方向形变的敏感性差异很大,仅使用一个观测方向的数据会由于雷达叠掩和阴影等因素的影响而得不到真实的地表空间信息[4]。因此,系统地研究利用多个观测方向的SAR数据获取地表的DEM具有重要意义。
二、InSAR获取DEM的原理
合成孔径雷达干涉测量是基于雷达信号的相干处理,利用以一定的时间间隔和轻微的轨道偏离对同一地区重复观测得到的两幅图像的记录及SAR图像的相位信息来获取高程信息,建立目标区域的数字高程模型,得到目标区域的三维坐标数据[2]。根据SAR信号的获取方式,可分为交轨干涉测量模式(CTI)、顺轨干涉测量模式(ATI)和重复轨道干涉测量模式(RTI)。但是,无论采取哪一种模式,其基本原理都是一样的。下面就以重复轨道干涉测量模式为例来阐述InSAR获取DEM的基本原理。
如图1所示,S1和S2分别代表两个雷达天线,B为它们之间的距离,称为基线。R和ΔR分别为斜距。α为基线与水平方向的夹角,θ为入射角,Η为天线的高度,h为地面上点的高程。
在不考虑有散射特性所引起的随机相位的情况下,雷达天线上的接收机所接收到的信号的相位就只与传播路径有关,可表示为
(1)
(2)
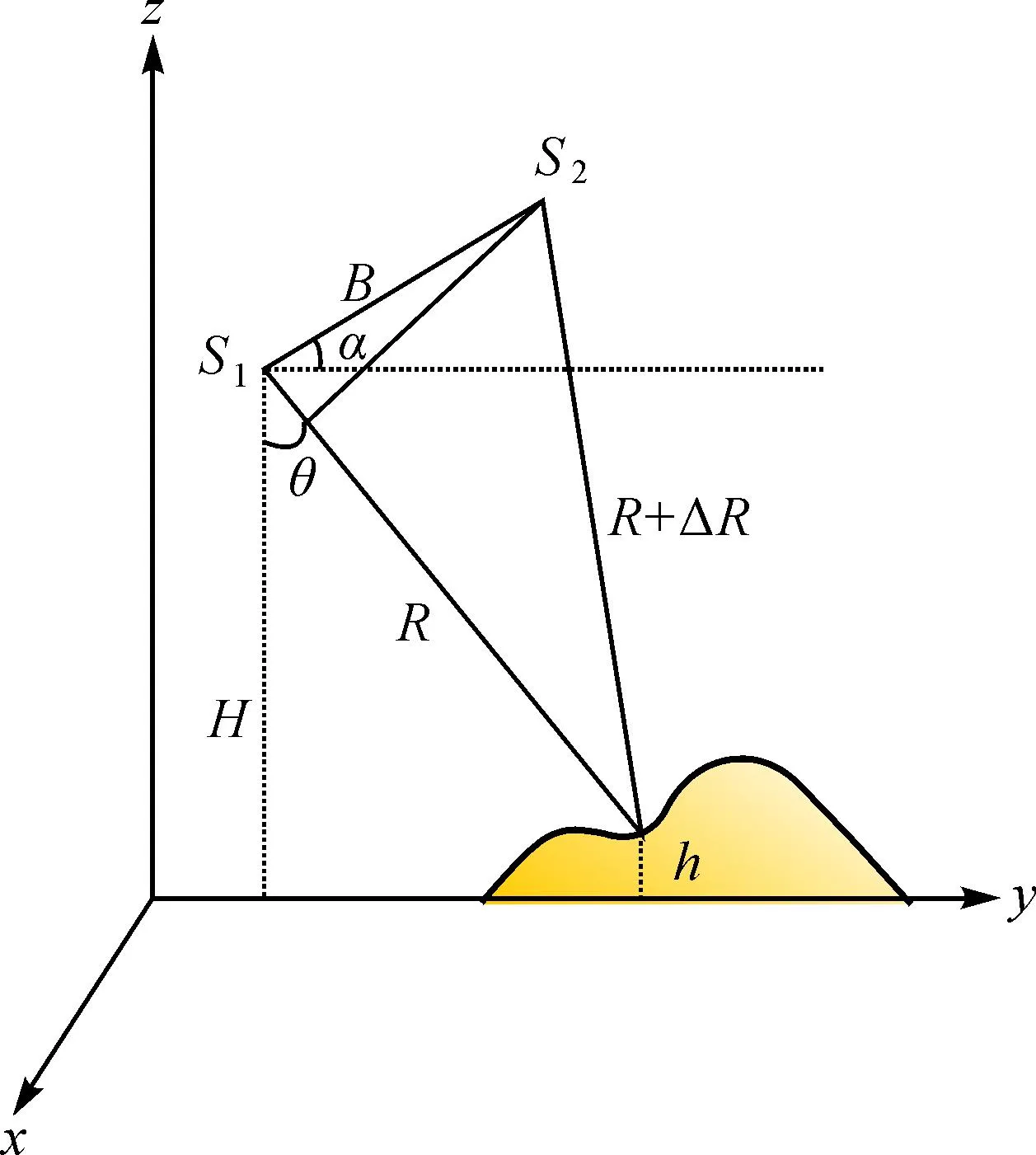
图1 InSAR基本原理
根据图1,地面目标点的高程h为
h=H-Rcosθ
(3)
结合余弦定理可得
(4)
结合式(2)、式(4)得出

(5)
综上所述,若已知雷达天线的位置、相位差、基线、基线与水平线的夹角、入射角,就可以计算出地面目标区域的高程值h,即利用InSAR技术可以获取地面某点的高程信息[5-6]。
三、试验分析
1. 技术路线
数据融合技术是指利用计算机对按时序获得的若干观测信息,在一定准则下加以自动分析、综合,以完成所需的决策和评估任务而进行的信息处理技术。根据研究目的,试验需要分别将升轨SAR数据和降轨SAR数据进行处理,获得升轨DEM和降轨DEM,再将其进行融合,获取融合DEM。本文的技术路线如图2所示。
2. InSAR获取DEM的试验研究
(1) 试验数据
试验选取ENVISAT卫星分别于2009年3月11日、2009年4月15日获取的升轨数据和2009年2月1日、2009年4月12日获取的降轨数据作为试验数据,提取InSAR DEM,数据覆盖了厄立特里亚国埃德地区。研究区位于东非及非洲之角最北部,东部频临红海,境内中心地带为海拔1800~2500 m的高原。试验数据的基本参数见表1[7]。

图2 技术路线
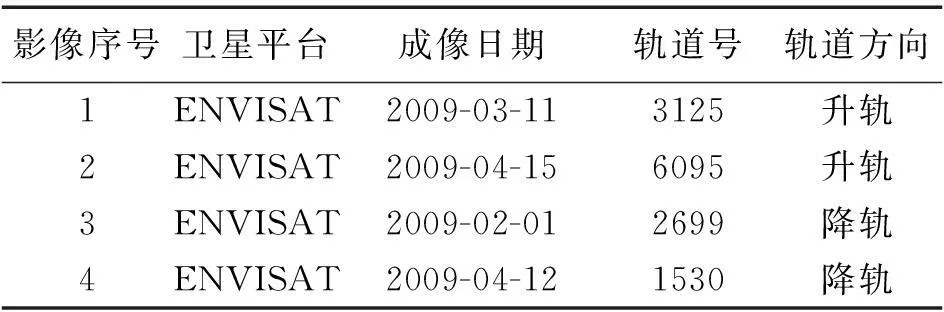
影像序号卫星平台成像日期轨道号轨道方向1ENVISAT2009-03-113125升轨2ENVISAT2009-04-156095升轨3ENVISAT2009-02-012699降轨4ENVISAT2009-04-121530降轨
(2) InSAR DEM的提取
根据图1中的流程分别利用升轨SAR影像数据对、降轨SAR影像数据对获取两个观测方向的DEM,然后将不同观测方向的DEM分别进行羽化融合、均值融合、最佳分辨率融合,得到不同观测方向的融合DEM。
① 羽化
羽化的原理是令选区内外衔接的部分虚化,使所选区域与周围的像素混合。羽化值越大,虚化范围越宽,颜色递变越柔和;羽化值越小,虚化范围越窄,颜色递变越剧烈。在DEM融合过程中,重叠区域的像素值通过羽化窗口的像素值的加权平均值来确定[8]。
(6)
式中,A表示升轨DEM;D表示降轨DEM;M为融合DEM;m、n表示羽化窗口大小;i、j表示羽化窗口中心像元在图像中的位置。
② 均值
均值是表示一组数据集中趋势的量数,是反映数据集中趋势的一项指标。在DEM融合过程中,重叠区域的像素值通过输入数据对应像元的像素值的算术平均值来确定。
③ 最佳分辨率
空间分辨率是指图像中能够识别的两个相邻地物的最小距离。在DEM融合过程中,重叠区域的像素值通过参考DEM(SRTM3 DEM)、输入DEM(升轨DEM、降轨DEM)对应像元的像素值以及空间分辨率来确定。若升轨DEM为A,降轨DEM为D,参考DEM为P,则融合DEM的像素值可表示为
(7)
对式(7)简化为
(8)
式中,RA、RD、RP分别表示升轨DEM、降轨DEM、参考DEM的空间分辨率;WA、WD、WP分别表示升轨DEM、降轨DEM、参考DEM对应像元的像素值;W表示融合DEM的像素值。
InSAR获取的DEM结果如图3所示。其中,(a)为参考DEM——SRTM3DEM;(b)为升轨DEM;(c)为降轨DEM;(d)为羽化融合DEM结果;(e)为均值融合DEM结果;(f)为最佳分辨率融合DEM结果。
(3) 高程精度统计与分析
由于无法获取更高精度的高程验证数据,试验过程中选用美国太空总署和国防部国家测绘局联合测量的SRTM3DEM作为参考标准,分别对融合前后DEM的相同区域采用叠加分析的相减法进行分析[9],InSARDEM与参考DEM做差后的高程差异图如图4所示。其中(a)为升轨DEM与SRTM3DEM之差;(b)为降轨DEM与SRTM3DEM之差;(c)为羽化融合DEM与SRTM3DEM之差;(d)为均值融合DEM与SRTM3DEM之差;(e)为最佳分辨率融合DEM与SRTM3DEM之差。

图3 InSAR DEM结果

图4 InSAR DEM与SRTM之差
对各InSARDEM与SRTM3DEM的高程差异进行统计。统计结果表明,升轨DEM相对于SRTM3DEM的差异均值为-4m,差异值统计标准差为47.56m,差异绝对值小于15m的地区占24.17%;降轨DEM相对于SRTM3DEM的差异均值为9.71m,差异值统计标准差为±16.93m,差异绝对值小于15m的地区占65.15%;羽化融合DEM相对于SRTM3DEM的差异均值为+1.84m,差异值统计标准差为±7.25m,差异绝对值小于15m的地区占95.48%;均值融合DEM相对于SRTM3DEM的差异均值为+2.39m,差异值统计标准差为±8.18m,差异绝对值小于15m的地区占93.09%;最佳分辨率融合DEM相对于SRTM3DEM的差异均值为+8.51m,差异值统计标准差为±14.44m,差异绝对值小于15m的地区占60.38%。
结合图4和表2可以看出,融合后的DEM精度比融合前高,且羽化融合生成的DEM比均值融合、最佳分辨率融合生成的DEM精度高[10]。

表2 高程差异统计结果
四、结束语
由于在地形起伏较大的区域会出现透视收缩、顶底位移以及雷达叠掩等现象,因此,仅利用单一观测方向的SAR数据获取DEM时,会出现失真现象,从而使得误差较大。利用多个观测方向的SAR数据获取DEM,可以消除由于雷达叠掩、透视收缩等现象引起的失真,从而能够降低误差,并清晰地描述地形起伏的纹理特征,具有较高的可靠性及较强的实用性。
本文主要介绍了基于升轨SAR数据和降轨SAR数据生成DEM过程中融合DEM的几种方法,并将融合前后的DEM与参考DEM通过叠加分析的相减法进行比较分析。通过试验比较发现,融合大大提高了DEM的精度,且羽化融合生成的DEM精度比均值融合、最佳分辨率融合生成的DEM精度高。
参考文献:
[1]李志林, 朱庆. 数字高程模型[M]. 武汉: 武汉大学出版社, 2001.
[2]张博, 张文君, 蔡国琳. 基于InSAR技术的DEM提取及InSAR DEM精度与地形因子的关系[J]. 安徽农业科学, 2012, 40(6): 3767-3769.
[3]季灵运, 许建东. 利用D-InSAR和AZO技术获取Bam地震同震三维形变场[J]. 大地测量与地球动力学, 2009, 29(6): 40-44.
[4]孙建宝, 梁芳, 徐锡伟, 等. 升降轨道ASAR雷达干涉揭示的巴姆地震(Mw6.5)3D同震形变场[J]. 遥感学报, 2006, 10(4): 489-496.
[5]刘智, 张红, 王超. 星载合成孔径雷达干涉测量[M]. 北京: 科学出版社, 2002.
[6]何敏,何秀凤. 利用星载InSAR技术提取镇江地区DEM及其精度分析[J]. 计算机应用, 2010, 30(2): 537-539.
[7]王志勇, 张继贤, 张永红. 从InSAR干涉测量提取DEM[J]. 测绘通报, 2007(7): 27-29, 34.
[8]杨光. 基于双中心羽化加权WPCA的人脸识别算法研[D]. 北京: 北京交通大学, 2006.
[9] 丁琼, 刘国祥, 蔡国林, 等. InSAR DEM精度与地形特征的关系分析[J]. 测绘科学, 2009, 34(1): 147-148, 186.
[10]刘国祥, 丁晓利, 李志林, 等. 使用InSAR建立DEM的试验研究[J]. 测绘学报, 2001, 30(4): 336-342.
[11]杨成生, 赵超英, 季灵运. InSAR技术用于西安地区DEM生成的精度分析[J]. 工程勘察, 2008(6): 47-49.
[12]荆创利. 使用SAR影像生成DEM的方法研究与精度分析[D]. 成都: 西南交通大学, 2008.
[13]TOUTIN T. Impact of Terrain Slope and Aspect on Radargrammetric DEM Accuracy[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2002, 57(3): 228-240.
[14]肖金群. 采用D-InSAR技术获取山区DEM的研究[D]. 长沙: 中南大学, 2011.
[15]皮亦鸣, 杨建宇, 付毓生, 等. 合成孔径雷达成像原理[M]. 北京: 电子科技大学出版社, 2007.
作者简介:王琴(1990—),女,硕士生,主要从事环境遥感应用研究。E-mail:476328665@qq.com
基金项目:国家自然科学基金(41201419)
收稿日期:2014-05-14
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2015)06-0039-05