波浪模拟标定系统的设计
2016-01-25李选群范秀涛张继明万晓正李文庆
李选群,范秀涛,张继明,万晓正,李文庆
(山东省海洋环境观测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
波浪模拟标定系统的设计
李选群,范秀涛,张继明,万晓正,李文庆
(山东省海洋环境观测技术重点实验室,山东省科学院海洋仪器仪表研究所,山东 青岛 266001)
摘要:基于重力加速度式波浪传感器的工作原理,设计了一套波高在0.5~9 m范围可调、周期在2~40 s连续可调的波浪模拟标定系统。系统根据正弦波浪理论,将波浪传感器安装在可做匀速转动的一圆形桁架上,波浪传感器的运动轨迹可看做正弦运动,以此进行模拟标定,再由控制系统控制波浪传感器的旋转半径和桁架的转动周期,从而实现对波高和波周期的模拟和标定。最后通过有限元对桁架的整体结构强度和刚度进行分析,并在理论上对系统的模拟标定精度作出分析,得到波高精确度为±2 mm,周期精确度为±0.1 s,达到设计和使用要求。
关键词:波浪;模拟标定;桁架;ANSYS
随着国家海洋经济开发战略的大力发展和持续推进,各类进口和自主研发的海洋监测仪器装备被大量使用,其中各种规格波浪传感器的应用也逐年增多[1],相应的计量标定设备作为波浪传感器数据精确可靠的保证,作用非常重要。
在我国,山东省科学院海洋仪器仪表研究所[2]、国家海洋标准计量中心[3-4]和中山探海仪器有限公司等单位和企业进行过波浪模拟标定设备的研究,但与国外设备相比仍存在标定精度较低、标定指标范围达不到使用要求等问题。为了缩短各型波浪传感器的生产开发周期和重新标定利用已有的波浪传感器,必须进行波浪模拟标定系统的设计研究,以满足国内日益增多的波浪传感器研发及标定需求。本文根据重力加速度式波浪传感器的工作原理,设计了一套波高可调、频率连续可调的波浪模拟标定系统。
1系统总体设计
1.1设计原理
本系统模拟标定的是基本的简谐二维波,结合重力加速度式波浪传感器的工作原理,波浪传感器的两个主要参数为波高与周期,波浪的波高变化为正弦波[1,5-7]。因此,为实现波浪模拟功能,系统必须能设置波高的正弦变化,并且周期连续可调;为实现传感器的标定功能,系统必须有检测装置能够直接或间接检测模拟实时波高值及周期值。
本文为实现上述模拟和标定功能,根据正弦波浪理论和重力加速度式波浪浮标[7]计量检定规程,设计了一套波高在0.5~9 m范围内可调,周期在2~40 s连续可调的波浪模拟标定系统。将波浪传感器安装固定在可调整旋转半径及周期的桁架上,并驱动传感器及夹具自身也做旋转运动,使波浪传感器在随桁架的转动过程中始终保持水平,从而模拟波浪传感器在实际工作环境中的运动。其中,系统通过调整波浪传感器距离桁架旋转中心的半径,实现对波高大小的模拟;同时通过实时检测控制驱动系统的转速,实现对波浪周期的模拟;并通过波浪传感器调平系统,实现波浪传感器对实际工作环境中的随波状态的模拟。
基于以上分析,提出如图1所示的系统原理图,传感器及夹具旋转周期与主轴旋转周期一致,幅值与旋转半径相同,那么,主桁架的匀速转动过程就能够实现传感器夹具高度的正弦变化,同时为了使传感器支架始终保持水平,必须根据桁架主臂与竖直面角度的变化,实时调整桁架主臂与传感器夹具支架之间的夹角。其中主轴旋转角度为α,传感器平台垂直轴线与桁架主臂夹角为β,机架半径长度为l,传感器与水平面的垂直距离为d,若主轴以匀速ω转动,则有d=l·sinωt,α+β=90°。

图1 系统原理示意图Fig.1 Illustration of system principle
1.2系统组成
波浪模拟标定系统由电控系统、主桁架系统、平动调节系统、波高调节系统及配重调节系统等子系统组成,系统组成框图如图2所示。
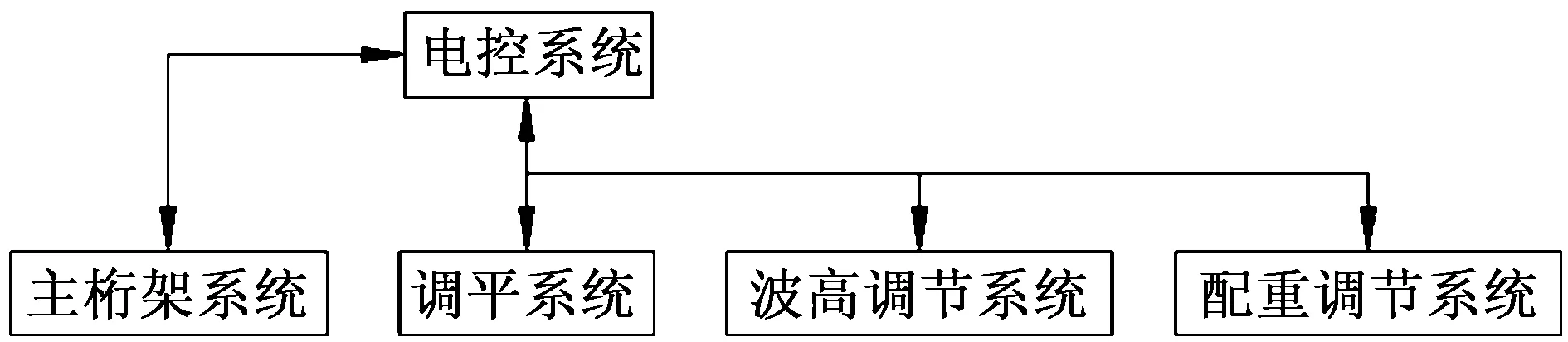
图2 系统组成框图Fig.2 Block diagram of system composition
本系统中,电控系统主要完成波浪频率设置、各分系统的控制以及对整机运行过程中运行状态的监测与记录功能。主桁架系统控制主桁架按照设定的旋转速度稳速运行,其结构主要包括主旋转桁架、电动机、减速器、离合器、制动器、速度传感器和电机驱动器等。调平系统控制传感器支架的旋转运动,使传感器支架始终保持水平状态,其结构主要包括调平电动机、减速器、角位移传感器、电机驱动器和主轴角度传感器等。波高调节系统用于静态时调整传感器支架的径向位置即波高,当传感器支架达到预定位置后,锁紧机构将锁紧,其结构主要包括调高电动机、齿轮齿条机构、驱动器和锁紧机构等。配重调节系统与波高调节系统组成相同,控制方法与方式相似,实现静态时配重块位置的调整。系统各部件示意图及效果图分别如图3、图4所示。

1 波浪传感器 2 调升滑块 3 齿条 4 桁架 5 周期检测装置 6 导轨 7 配重 8 信息采集器 9 计算机 10 控制器 11 主电机 12 主减速器 13 离合器 14 刹车装置图3 系统示意图Fig.3 Illustration of system

图4 系统效果图Fig.4 System effect picture
2系统结构设计
2.1主桁架设计

图5 主旋转桁架结构模型Fig.5 Structure model of main rotating truss
为保证系统功能的实现,本系统主体桁架设计为环式旋转结构,如图5所示。桁架通过旋转中心的两个半轴支撑在轴承座上,其中一侧的半轴A直接与驱动部分的桁架结构相连,在旋转桁架上,两根槽钢以平行结构排列于桁架上作为主臂,同时,用槽钢以中心圆盘为中心呈辐射状分布在桁架上,并在槽钢之间按顺序分布一定数量的支撑杆,使整个桁架结构形成一个有机整体[1-2,8-9]。桁架通过半轴A直接与刹车盘、离合器、减速器和电动机相连,另一侧则通过轴承套架在固定于地面的半轴B之上。作为主臂的槽钢经过加工后成为轨道,在主臂的一端设计有固定被测对象的夹具支架,在主臂的另一端设计有一套配重支架,通过波高调节系统,夹具支架和配重支架能够沿主臂导轨在桁架上做径向移动,这样既能调节被测对象旋转半径,又能保证桁架平衡和主臂平行度。
2.2平动调节系统的设计
由于波浪传感器支架的摆动、振动问题可能会造成传感器转动的实际波高与支架主轴的旋转直径不符,而这种不符又不能通过简单测量予以修正[1]。因此,如果传感器支架能始终保持水平,则在忽略夹具形变后,支架(含传感器)上各点运动轨迹完全相同。这样,不论传感器位置如何偏离夹具的几何中心,其运动都可以使用夹具安装孔的中心点来代替,而该点则可完全静态准确测量,这样可以提高波高的标定精度。
虽然使物体在旋转中保持平动的方法很多,如常平架法、同步平动链法等,但这些方法存在结构复杂、加工精度高、控制困难以及成本较高等问题[1]。因此,本文提出采用交流伺服电机位置闭环控制来实现夹具的平动。波浪传感器通过支架实现定位,支架又与伺服电机相连,在夹具随桁架旋转的同时,波浪传感器及支架自身也能转动,当桁架旋转某一角度时,调平电机根据桁架主臂的瞬时位置,驱动传感器及支架反向旋转相同的角度,这就使得支架平面相对地面始终保持不变,即波浪传感器及支架实现平动,如图6所示。

图6 夹具结构模型Fig.6 Structure model of the fixture
2.3波高调节系统的设计
在实际模拟标定过程中,波高的调节即是对波浪传感器旋转直径的调节,本系统采用有极调节方式,且是在桁架静止状态时进行调节。在两平行的主臂上均安装有齿轮齿条机构和导向导轨,夹具上的调高电机带动齿轮齿条运动,使整套夹具装置沿着主臂导轨径向移动,从而调节被测设备的旋转直径,当夹具到达需要模拟标定波高对应的旋转半径时,采用锁紧机构将夹具装置与主臂紧固,如图6所示。
3控制系统设计
根据系统要求,设计电控系统的总体控制框图,如图7所示。

图7 系统控制框图Fig.7 System control diagram
整个控制系统主要包括5部分:工控机、主桁架旋转控制、调平调节控制、波高调节控制及配重调节控制。主桁架的旋转采用速度闭环控制实现,传感器支架的旋转采用位置闭环控制实现,传感器支架和配重在桁架径向的移动由从控制器指令开环控制。
为明确整个控制系统的工作过程及各部分之间的关系,现对各部分功能进行详细分析。
3.1工控机
操作人员通过上位机软件开发出操作界面,实现人与机器的交互,通过计算机随时调整主轴旋转周期,并且在停机情况下通过计算机对波高电机及配重电机进行点动控制。模拟标定过程中,主轴和调平电机的角度位置由从控制器通过无线传输方式送达至工控机,用于屏幕显示及记录,同时计算机根据实际返回值计算波浪传感器的实际运动周期。
3.2主桁架旋转控制
主轴控制器通过串行通讯方式接收工控机发来的时间周期,计算得到主轴在此周期下的转速,并将该转速值作为速度给定值控制主电机的转速,同时采用速度闭环控制,利用增量编码器测得的速度值作为反馈值,控制原理图如图8所示。

图8 速度闭环控制框图Fig.8 Control block diagram of closed loop speed
3.3传感器支架旋转控制
模拟标定过程中,必须保证传感器支架与主轴旋转角度有关联的位置关系。为检测主轴旋转角度,在主轴上加装绝对编码器,安装方式为编码器轴相对地面固定,外圈随桁架一起旋转,这样能够将传感器的信号不通过滑环而直接接入到传感器支架控制器,经过计算后作为传感器支架的位置指令,同时采用位置闭环控制,利用绝对编码器测得的位置值作为反馈值。控制原理图如图9所示。
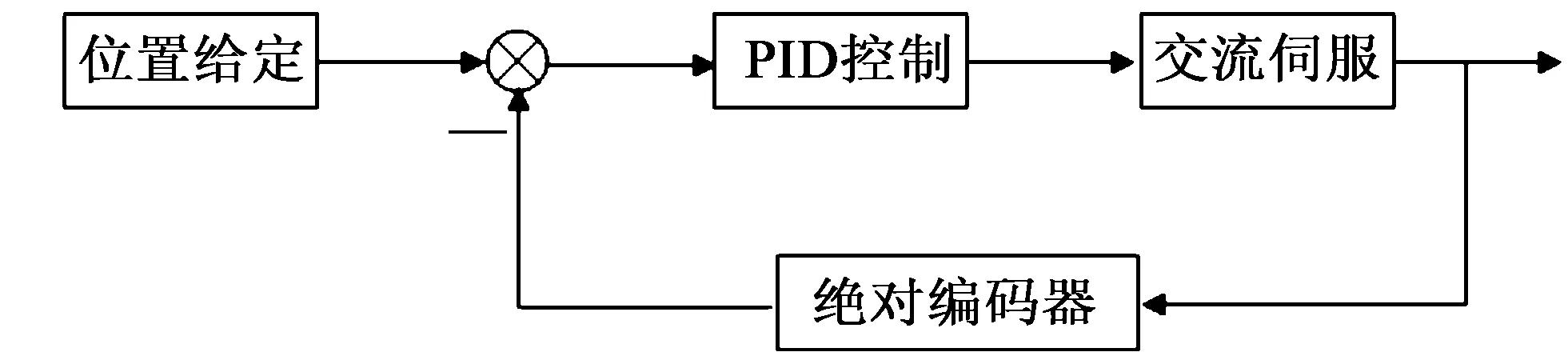
图9 位置闭环控制图Fig.9 Control block diagram of closed loop position
3.4波高调节控制和配重调节控制
波高调节控制与配重调节控制的原理一致,分别控制波浪传感器及支架和配重块在桁架主臂上的位置。调节功能采用开环点动控制,在系统桁架静态条件下使用,此时,工控机将波浪传感器及支架和配重块的波高调节指令送达从控制器,输出启动和停止信号来控制波高调节电机或配重调节电机的正向或反向转动,驱动夹具装置或配重装置在桁架主臂上做径向移动,到达各自的预定位置后由锁紧结构固定。
4系统分析
4.1结构分析
本系统中桁架结构材料全部采用普通型钢,设定桁架转动最小周期为2 s,足够的结构强度和刚度直接关系到系统模拟标定过程的准确性和安全性。由于桁架结构件比较多,受力比较复杂,传统的力学分析方法步骤繁琐,且结果不精确[10-11]。本文采用ANSYS软件的结构分析模块,对主桁架系统整体刚度、强度进行有限元分析。
通过分析系统的实际工况可知,桁架的受力和变形主要来自于不同旋转周期下的径向力,因此,本文主要分析桁架在最小周期下沿径向的应力和应变。首先,建立主桁架有限元模型并定义材料属性,单元类型采用梁单元,材料定义为结构钢,然后,采用自由网格的方式划分网格,共生成5 348个单元,11 427个节点,再施加约束和初始载荷,约束为圆柱支撑,初始载荷施加重力和最小周期时的旋转速度(π rad/s),最后求解得到桁架的应力和应变情况分别如图10、图11所示。
由图10可知,桁架结构在径向上的最大应力为20.5 MPa,发生在桁架最外圈的十字连接架处,仿真强度远低于材料的屈服极限,满足强度设计要求,且安全系数合理。由图11可知,桁架在径向的最大变形为1.88 mm,即桁架在最小周期转动条件下桁架最外边缘相对旋转中心的位移量,经判断,该桁架的刚度也满足要求。同时在运用ANSYS仿真时发现,桁架中心处连接盘的强度裕量过大,进而对中心连接盘进行优化设计,避免造成浪费。
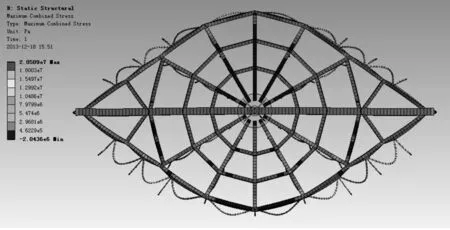
图10 桁架结构应力图Fig.10 Stress diagram of truss structure
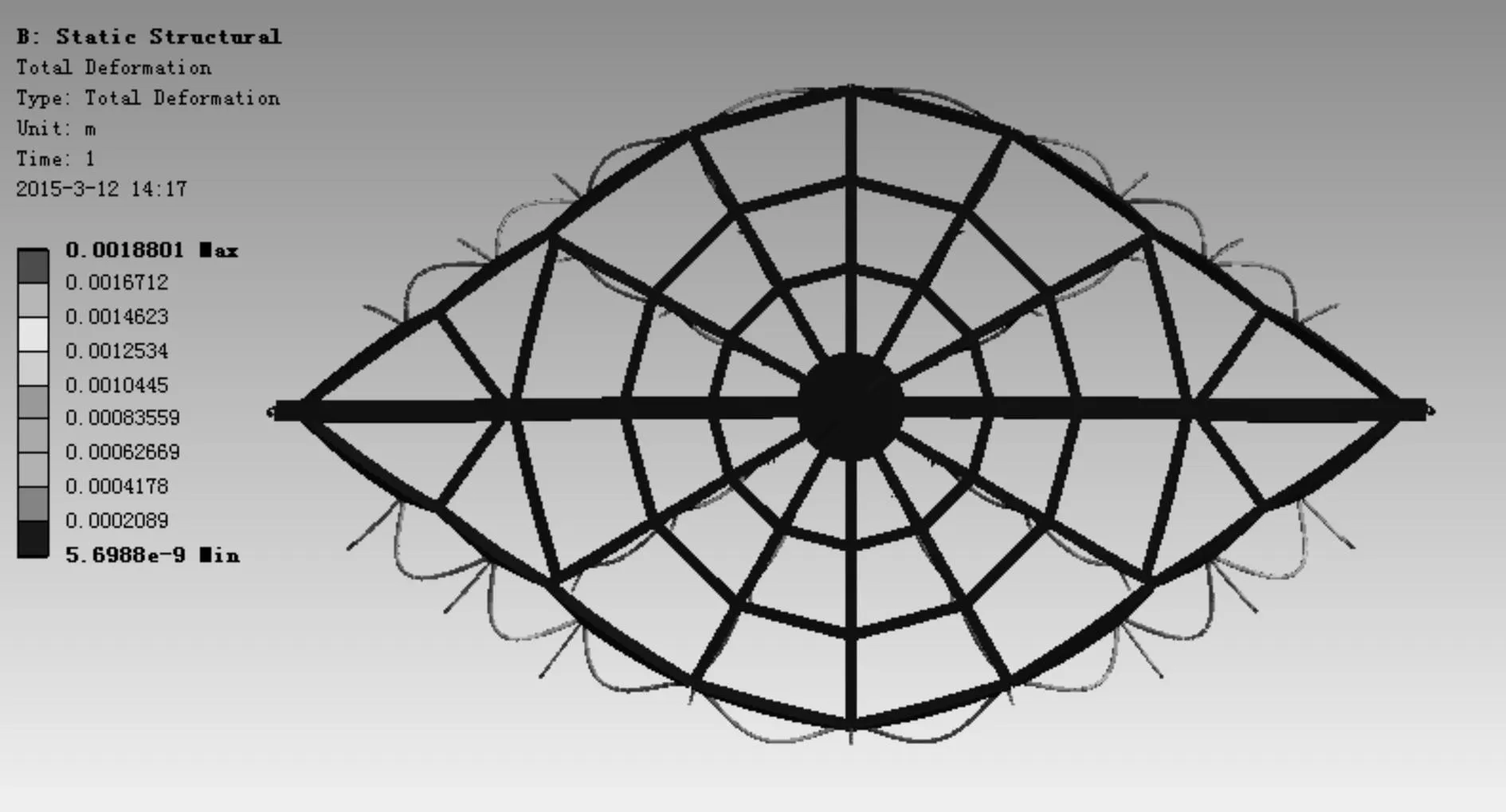
图11 桁架结构应变图Fig.11 Strain diagram of truss structure
4.2精度分析
系统本身的精度直接影响模拟标定的准确性,因此,必须对系统运行误差进行分析,以确定系统是否能够满足标定功能要求。
本系统的两个关键技术指标是波高和周期。在模拟标定过程中,波浪传感器的波高即桁架主轴距离波浪传感器支架主轴中心的距离,此精度由机械结构保证,在系统安装完成后,对于每个模拟标定波高值,调整完成后都用锁紧机构固定,可在静态时用激光测距仪实际测量每个模拟标定位置的准确长度,与系统的控制精度无关,这样可以保证系统波高的模拟标定精度达到2 mm的误差要求;本系统在转动过程中每个周期负载变化规律相同,属于是一个稳定惯性负载。主轴控制采用速度闭环控制,周期变化值很小,一般稳速精度可以达到3‰。从测试的角度看,实际周期值是通过读取桁架主轴上编码器的反馈值计算周期值,周期采样由调平控制器采集,调平控制器的采样周期为小于5 ms,即周期采样的最大误差不大于5 ms,完全满足系统要求。
波浪传感器支架的水平度是影响波浪传感器模拟标定结果的主要因素。通过前面系统功能分析,桁架主轴和调平电机的转动均为匀速转动,传感器支架上负载为固定负载,且一直工作在水平位置,倾覆转矩几乎无变化,使用交流伺服电动机即能够达到实时跟踪主臂角度的功能,并在主轴上安装绝对式编码器对波浪传感器支架的水平控制精度进行检测。
5结论
本文设计的波高可调、周期连续可调的波浪模拟标定系统,不仅能够用于模拟和标定波浪传感器等测波设备的波高和周期,而且可以模拟标定波高和周期的精度和范围,较国内现有设备在技术上有了明显的提高,模拟标定的最大波高达到9 m,精度达到±2 mm,在实现波浪传感器平动方式上采用伺服系统控制,从根本上消除了以往常平架、平动链等技术上的弊端。目前系统结构已加工完毕,正处于调试阶段,各项性能均稳定可靠,该系统将为确保海洋数据的质量提供重要的基础保障。
参考文献:
[1]隋军. 重力加速度式波浪浮标量值溯源体系研究[D]. 青岛:中国海洋大学,2006.
[2]吕富强,綦声波,朱洪海,等.AT89C2051在数控波浪模拟标定装置中的应用[J]. 微计算机信息,2002,18(8):40-41.
[3]张海利. 基于MFC波浪浮标检定装置闭环系统的软件研究与设计[D]. 天津:天津大学,2012.
[4]董树凯. 重力加速度式波浪浮标检定系统研究[D]. 天津:河北工业大学,2013.
[5]赵力. FZF2-3型海洋资料浮标传感器系统[J]. 海洋技术,1998,17(2):38-43.
[6]H.O.贝托. 浮标工程[M]. 北京:科学出版社,1980.
[7]JJG(海洋)04-2003,重力加速度式波浪浮标[S].
[8]吴宗泽. 机械结构设计准则与实例[M]. 北京:机械工业出版社,2006.
[9]欧贵宝,朱加铭. 材料力学[M]. 哈尔滨:哈尔滨工程大学出版社,1997.
[10]张琦,陈瑞兵,孙建熙,等.摩天轮结构有限元分析与优化设计[J]. 装备制造技术,2014(5):10-13.
[11]何小兵,边新孝,姚莉莉,等, 摩天轮有限元结构分析[J]. 机械,2007, 34(4):19-20.
[12]陈康华. 基于ANSYS的大跨度张弦桁架结构静力分析[J].科技风,2010(16):203.
[13]王中要,郭秀文. 基于ANSYS的梁结构有限元分析[J]. 公路,2009(7):159-161.
【海洋科技与装备】
Design of wave simulation and calibration system
LI Xuan-qun,FAN Xiu-tao, ZHANG Ji-ming, WAN Xiao-zheng, LI Wen-qing
(Shandong Provincial Key Laboratory of Ocean Environmental Monitoring Technology, Institute of Oceanographic
Instrumentation, Shandong Academy of Sciences, Qingdao 266001, China)
Abstract∶We design a set of wave simulation calibration system based on the principle of gravity acceleration wave sensor.Its parameters are adjustable forwave height of 0.5 ~ 9 m, and cycle of 2 ~ 40 s.We mount a wave sensor on a circular truss of uniform rotation based on sine wave theory.The trajectory of the wave sensor can be considered as a sine wave, which is simulated the calibration.Its control system controls rotational radius of the wave sensor and the rotational cycle of the truss in order to achieve the simulation and calibration for wave height and wave period.We eventually employ finite element analysis for truss overall structural strength and stiffness.We also analyze its calibration precision, and acquire the wave height accuracy of ± 2 mm and wave cycle accuracy of ± 0.1 s.The results satisfy the requirement of design and operation.
Key words∶wave;simulation and calibration; truss; ANSYS
中图分类号:TH766+.2;TB21
文献标识码:A
文章编号:1002-4026(2015)04-0001-07
作者简介:李选群(1984-),男,研究实习员,研究方向为海洋装备结构设计。Email:qunxuanhong@126.com
基金项目:国家自然科学基金(41401435)
收稿日期:2015-04-22
DOI:10.3976/j.issn.1002-4026.2015.04.001