基于图像处理的接触网定位线夹目标检测
2016-01-25张春春王嵩张冬凯周胜
张春春,王嵩,张冬凯,周胜
(西南交通大学 电气工程学院,四川 成都 610031)
基于图像处理的接触网定位线夹目标检测
张春春,王嵩,张冬凯,周胜
(西南交通大学 电气工程学院,四川 成都 610031)
摘要:随着接触网故障检测技术的发展,接触网悬挂状态检测监测装置可得到接触网定位装置的海量高清图像用于线下故障排查。为提高故障检测的效率和准确性,基于图像处理技术,根据定位线夹区域的结构特征设计定位线夹目标区域的检测算法,并通过实际图像数据验证算法的有效性和通用性。该算法对于背景复杂、光照不均、含噪声等现场实际图像均具有良好的适应性,算法检测准确率达90%以上,极大提高了检测效率并为进一步的缺陷检测奠定了基础,具有重要的实际工程意义。
关键词:接触网检测;图像处理;故障检测;定位线夹

接触网是电气化铁路的重要设备,由接触悬挂、支持装置、定位装置、支柱与基础几部分组成,其技术参数是否符合要求直接影响铁路供电和行车安全。为保证电气化铁路的安全运营,原铁道部积极构建高速铁路供电安全检测监测系统(6C系统),并于2012年7月发布实施《高速铁路供电安全检测监测系统(6C系统)总体技术规范》[1]。接触网悬挂状态检测监测装置(简称4C系统)是6C系统的重要组成部分,中国铁路总公司于2014年8月进一步给出了4C系统的技术条件。接触网悬挂状态检测监测装置着眼于接触网悬挂及其部件的技术状态检测,安装于接触网检测车、作业车或其他专用轨道车辆顶部,对接触网的零部件实施成像检测。通过对图像数据检测分析,发现故障并指导现场消除故障。在接触网悬挂中,定位线夹连接着接触线和支持装置[2],承受着弓网最大冲击力和接触线张力,是最重要也是最薄弱的零部件,实际运营中多次发生松动、脱落等故障,其严重故障甚至可能造成接触线脱落引发弓网事故。目前定位线夹的检测方式主要是人工线路巡检和人工查看4C系统得到的高清图像[3],人力消耗大且效率低下,同时由于接触网悬挂结构多变且缺陷种类繁多,技术人员面对单张图像需要观察多处不同类型故障,也导致工作效率难以提高。图像处理的高精度、高效率、自动化等优点使得其在接触网悬挂智能化检测中的应用越来越广泛,目前已实现了基于图像处理的定位器坡度检测[4]、定位器识别[5]、接触网几何参数测量[6]及绝缘子故障检测[7]等。然而国内外针对定位线夹的目标检测及故障分析的研究很少,实际工程应用也尚无先例。本文利用跨平台计算机视觉库OpenCV设计了基于图像处理的定位线夹的自动定位及提取局部图像算法,通过多条线路实测检验了算法的通用性及有效性。该方法极大地提高了线夹故障的检测效率并为后续故障识别提供基础。
1定位线夹与接触网悬挂检测系统
1.1 定位线夹及其工作状态
定位线夹安装在定位器上,与定位管、定位器及连接零件一起组成接触网定位装置,图1为其安装结构图。定位线夹的作用是把接触线按设计标准拉出值的要求固定在一定位置,保证接触线工作面平行于轨面。定位线夹长期工作在接触线张力下,在之字力、曲线力作用下会弯曲变形,另外机车受电弓经过时产生的高频振动,也会使线夹发生螺帽松动或者脱落,这些状况的发生均可能导致定位器脱落引发弓网故障。定位线夹作为接触网悬挂的关键部件之一,受力和振动的影响大,会产生不同程度的损坏引发弓网故障等因素,使得定位线夹的检测成为接触网检测的重中之重。

1.2 接触网悬挂状态检测装置
接触网悬挂检测装置结构作为成像检测系统,综合了激光摄像技术、动态拍摄技术、图像处理技术、数据库技术等。该装置可以在接触网作业车或专用车辆行驶过程中自动识别支持装置,从而确定成像设备定点拍摄的时机,使所拍摄的图像能够有效呈现接触网支持装置、接触悬挂、附加悬挂及吊柱座区域零部件的技术状态。通过高清相机及图像稳定技术得到高分辨率图像,可分辨部件松、脱、断、裂等故障,同时可提供站区、杆号、公里标等综合信息用于定位。

图1 定位装置及定位线夹Fig.1 Registration device and steady clamp
支持装置成像相机组由12个分辨率为6 576×4 384的2 900万像素工业相机组成。相机分为两组,分别从正反面对沿线支持装置、定位装置进行全覆盖高清拍摄,成像范围为轨顶连线以上4 800~8 400 mm范围与轨顶连线的垂直中心线左侧3 900 mm至右侧3 900 mm范围相交叉区域,空间分辨率可达0.4 mm/pixel,高分辨率的图像为进一步分辨裂纹、松脱等零部件细节缺陷提供支持。本文采用的图片数据便来自于装置中拍摄定位线夹关键区域的相机。

图2 接触网悬挂检测装置Fig.2 Suspension in catenary detection device
2定位线夹图像检测算法
4C装置得到的是6 576×4 384的2 900万像素图像,而定位线夹只占图像的1/45面积,在每张图像中准确定位定位线夹区域,并提供区域局部图像,可有效的提高检测效率。相较于定位线夹,定位器的尺寸较大且有明显的直线特征,因此可先根据直线特征检测到定位器,缩小检测范围,再对端点区域内检测,识别判定定位线夹位置。因此,设计的算法分成定位器的检测和定位线夹的识别2个步骤。
2.1 定位器检测
图像采集装置全天候拍摄,天气各不相同、背景也复杂多变,这些因素都会造成图像光照不均,质量不一。因此,为突出图像中各支持结构的线段特征,首先对图像进行边缘检测及形态学处理,以分割前景和背景。然后在分割后的图像上进行直线检测并选择端点区域为候选区域。
2.1.1图像预处理
边缘是目标的基本特征,有效的边缘检测可以分离目标区域和背景区域,为之后的形状分析及目标检测做准备。常用的边缘检测有Roberts算子、Prewitt算子、Sobel算子、LoG方法(高斯-拉普拉斯算子)、Canny算子,利用上述各算子对图像进行边缘检测,检测效果如图3所示。从图中可以看出Canny算子提取的边缘清晰完整、封闭性好,且更接近真实边缘。结合定位器直线检测需求,本文选用Canny算子进行边缘检测。

图3 不同微分算子的边缘检测结果Fig.3 Different differential operator of edge detection
Canny算子[8]是通过高斯滤波器平滑图像去除噪声,用一阶偏导有限差分计算梯度幅值和方向,并抑制非极大值,利用双阈值算法 (其中大阈值控制强边缘的初始分割,小阈值控制边缘连接)实现边缘提取,但是梯度阈值依赖人工选取。利用不同梯度阈值的Canny算子对采集到的图像进行边缘检测,结果如图4所示。从图中可以看出Canny算子阈值过高会漏掉重要的结构信息,阈值过低会显示无用的枝节信息。另外,针对不同线路采用固定阈值会极大影响算法通用性及效果。为此本文提出了基于图像归一化直方图计算概率均值并自动分区间设置Canny阈值的方法,以满足不同光照条件和图像质量情况下的图像分割。

图4 不同阈值下Canny结果Fig.4 Canny results of different thresholds
计算图像的归一化直方图,如图5所示。根据图像各个灰度值与出现频率的对应关系,可计算得到灰度概率均值,并依据概率均值分区间设置Canny阈值。概率均值计算步骤如下:
1)求取归一化直方图峰值对应的灰度值:
(1)
2)求取最小长度分布区间(α,β),使得α≤gmax≤β,区间内灰度概率和>=50%,即:

(2)
3)求取概率均值:

(3)
上述各式中符号含义如下:g为归一化直方图中各灰度值;Pg为归一化直方图中各灰度值对应的概率;gmax为归一化直方图峰值对应的灰度值;gm为灰度概率均值;(α,β)为归一化直方图中满足区间概率和>=50%的最小区间。

图5 归一化直方图Fig.5 Image normalized histogram
经过大量实际数据测试,根据实际图像效果得到各概率均值所在区间对应Canny阈值设置如表1。

表1 Canny算子阈值表
图像预处理具体步骤如下:
Step 1:缩小原图像。定位器在图中相对尺寸较大,缩小原图像可在不影响定位器检测的基础上提高运算。
Step 2:计算归一化直方图概率均值,分区间设置Canny算子梯度阈值,对图像进行边缘检测。
Step 3:对边缘图像进行形态学腐蚀、膨胀处理,连接相邻区域。
2.1.2直线检测及中心线提取
形态学处理后的边缘图像中,各部件直线特征更加明显,在此基础上进行全局直线检测,再进一步依据长度、位置及角度信息进行聚类筛选,得到符合定位器特征的直线,并提取直线端点区域为候选区域。
最常用的直线检测方法是Hough变换[9-10],其原理是利用图像空间和Hough参数空间的点-线对偶性,把图像空间中的检测问题转换到参数空间,通过在参数空间里进行累加统计,在Hough参数空间寻找累加器峰值的方法检测直线。利用Hough变换检测直线,可连续完整地提取图像中各结构直线,且受噪声干扰、其他目标遮挡影响小。具体算法过程如下。
Step 1:Hough检测。
由于接触悬挂相机位置固定,且根据定位器安装技术标准,定位器坡度值在一定范围内,对实际采集到的图像中定位器直线角度进行分析,结果如图6左图所示,可得到定位器角度主要分布在(-25°,10°)范围内的结论。为了适应实际多变的情况,算法加入裕量,检测并筛选角度范围在(-35°,20°)内的直线。
Step 2:直线聚类并求取类中心线。
由Step 1可得到图像中所有符合角度条件的直线,但是每个部件位置存在多条直线。为避免后续处理过程中,同一部件端点区域被重复提取,因此对直线进行聚类、融合并提取类中心线,各部件由中心线表示。
以直线角度θ和原点到直线距离ρ作为直线特征值,一幅图像中所有直线的ρ和θ的分布如图6右图所示。从图中可以看出,同一部件的多条直线其特征值分布比较集中,而不同部件间直线特征值距离较远,因此利用ρ和θ对直线聚类,以此区分不同部件。
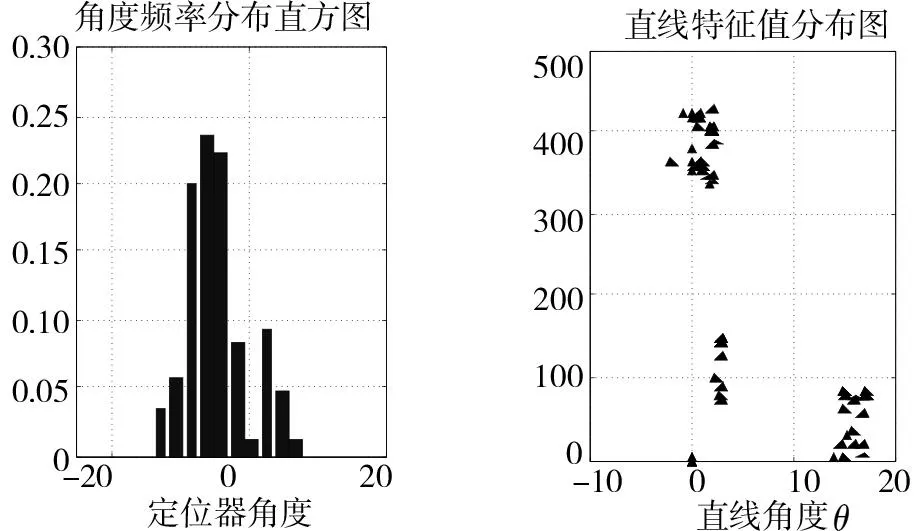
图6 定位器角度和直线特征量分布图Fig.6 Steady arm angle and line feature quantity distribution diagram
Step 3:提取直线端点区域为候选区域。
Step 2的中心线包含了部件在图像中的相对位置、角度及长度信息。首先,受电弓端点区域不是候选区域,其中心线为两条平行线,可基于此排除受电弓中心线。然后,其余各直线依据位置信息区分正定位和反定位,并选择左端点或右端点区域作为定位线夹候选区域。
定位器检测总体过程如图7,其中7(a)为原图,7(b)为图像边缘检测和形态学处理结果,7(c)为直线检测及聚类结果,7(d)为排除受电弓中心线结果。

(a)原图;(b)边缘检测和形态学处理结果;(c) 直线检测及聚类结果;(d) 排除受电弓中心线结果图7 定位器检测过程Fig.7 Steady arm detection
2.2 定位线夹识别
定位器检测可能得到的所有端点候选区域位置如图8所示,依次分析4个区域内的直线分布:
1)定位管端点区域1: 区域内不存在纵向的接触线,直线分布如图9(a);
2)受电弓端点区域3和4:区域内存在纵向直线,且与横向直线相交,以两直线交点为圆心、横向直线的1/2为半径取圆,该圆与两条直线有2个交点,直线分布如图9(b);
3)定位器端点区域2:区域内存在纵向直线接触线,且与横向直线相交,以两直线交点为圆心、横向直线的1/2为半径取圆,该圆与两条直线有3个交点,两直线成T形交叉结构,直线分布如图9(c),相应图像为图9(d)。

图8 图像感兴趣区域分析Fig.8 Region of interest image analysis
由上述分析可知,同时满足1)区域内存在纵向直线,2)纵向横向直线相交,3)两直线成T形交叉结构这3个条件的区域即为定位线夹区域。定位线夹识别主要步骤如下。
Step 1: 纵向直线检测。
在各候选区域内进行纵向直线检测,如果不存在纵向直线,则该区域非定位线夹区域;若存在,则进行下一步判定。
Step 2: T形特征检测。
若纵向直线与横向直线不相交,则该区域非定位线夹区域;如相交,以交点为圆心、横向直线的1/2为半径取圆,该圆与两条直线有3个交点,则判定为T形结构,该区域为定位线夹区域,返回直线端点坐标即为定位线夹坐标。
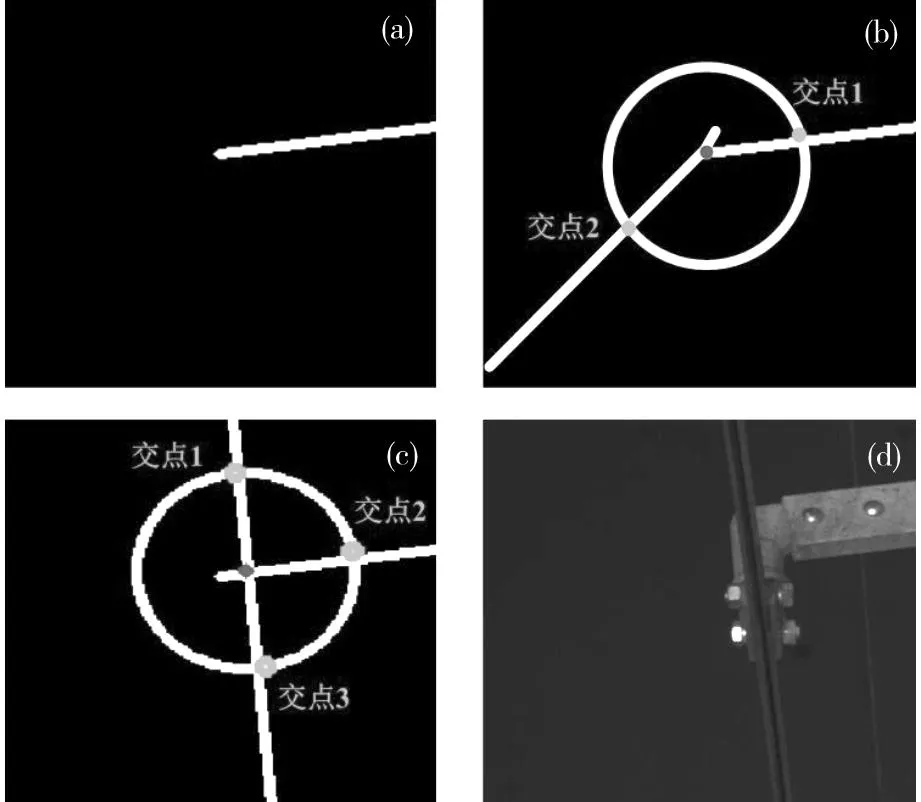
(a) 区域1直线分布;(b)区域3直线分布;(c)区域2直线分布;(d)定位线夹区域图9 定位线夹识别Fig.9 Steady clamp recognition
3实际线路运行结果及分析
在Microsoft Visual C++下,利用OpenCV图像处理平台运行前文所述的算法,在接触网悬挂状态检测管理软件中对实际多条线路拍摄的线路图片进行定位线夹的目标检测实验,结果如表2,准确率可达90%以上。
统计结果验证了算法的有效性和通用性,通过进一步分析实验结果,可以归纳出以下结论:
1)该算法利用归一化直方图分区间设定阈值进行边缘检测的方法,在不同的光照条件下的图像上都能得到理想的效果,满足直线检测的需要(图10(a),10(c),10(e)分别是晚上、白天强光、雾天拍摄的原图像,图10(b),10(d),10(f)分别为边缘检测结果)。

表2 定位线夹目标检测统计
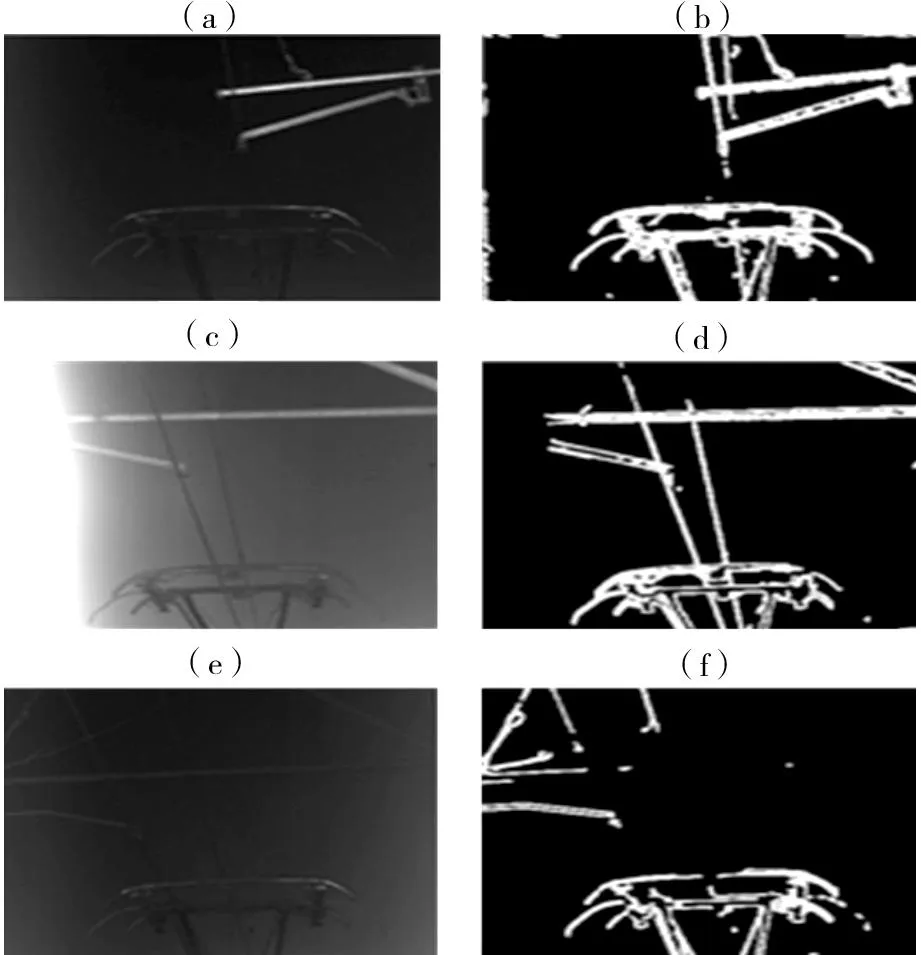
(a)夜间图像;(b)夜间图像分割结果;(c)白天强光图像;(d)白天强光图像分割结果;(e)大雾天气图像;(f)大雾图像分割结果图10 不同天气条件下图像分割结果Fig.10 Segmentation results under different weather conditions
2)算法依据结构特征在直线端点区域检测定位线夹的方法同样适用于隧道、车站内等复杂背景图像。(在原图中用矩形框标记定位结果,图11(a)为隧道内图像检测结果,图11(b)为车站内图像检测结果)。
3)算法在正定位、反定位或者动态拍摄导致线夹在图像位置不固定情况下,也能够较准确定位(在原图中用矩形框标记定位结果,图11(c),11(d),11(e)和11(f)分别是线夹位于图像中不同位置时的定位结果)。

(a)隧道内图像定位结果;(b)车站内图像定位结果;(c)线夹位于图像左上方;(d)线夹位于图像中部;(e) 线夹位于图像右下方;(f)线夹位于图像左下方图11 复杂背景和不同位置时的定位结果Fig.11 Targeting results of complex background and different positions
4结论
1)以接触网定位装置高清图像为研究对象,依据定位线夹区域结构特征,利用图像处理技术实现了接触网定位线夹区域的目标检测,为接触网定位线夹检测提供了一种方法,具有一定的实际工程意义。
2)提出的算法可以快速有效地提取高清图像中的定位线夹区域,且对多条线路图像具有适应性和有效性,实验结果表明其定位准确率达90%。
3)提出的算法为定位线夹故障检测奠定了基础,并为其他接触网悬挂状态的图像检测提供了参考。
参考文献:
[1] 高速铁路供电安全检测监测系统(6C系统)总体技术规范[S].2012.
Overall technical specifications for high-speed railway power supply security detection monitoring system (6C System)[S].2012.
[2] 于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003.
YU Wanju.High-speed electrified railway catenary[M].Chengdu: Southwest Jiaotong University Press, 2003.
[3] 张韬.基于图像处理的接触网检测系统研究[D].成都:西南交通大学,2008.
ZHANG Tao.Study on the OCS inspection system based on image processing[D].Chengdu: Southwest Jiaotong University, 2008.
[4] 何钊.基于图像处理技术的腕臂式支持装置倾角自动检测研究[D].成都:西南交通大学,2014.
HE Zhao.Study on automatic angle detection for supporting device based on image processing[D].Chengdu: Southwest Jiaotong University, 2014.
[5] 王旭东.接触网定位器自动识别算法研究[D].成都:西南交通大学,2014.
WANG Xudong.Automatic recognition algorithm for steady arms[D].Chengdu: Southwest Jiaotong University, 2014.
[6] 汪芳莉.基于双目视觉的接触网几何参数检测算法研究[D].兰州:兰州交通大学,2014.
WANG Fangli.Research on the detection Algorithm for catenary geometry based on binocular vision[D].Lanzhou:Lanzhou Jiaotong University, 2014.
[7] 郭晓旭,刘志刚,张桂南,等.角点配准与图像差分的接触网绝缘子故障检测[J].电力系统及其自动化学报,2015(2):8-14.
GUO Xiaoxu, LIU Zhigang, ZHANG Guinan, et al.Fault detection of catenary insulator based on corner matching and image differencing[J].Proceedings of the CSU-EPSA, 2015(2):8-14.
[8] Canny John.A computational approach to edge detection[J].Pattern Analysis and Machine Intelligence, IEEE Transactions, 1986, PAMI-8(6):679-698.
[9] VC H P.Method and means for recognizing complex patterns: U.S.Patent 3,069,654[P].1962-12-18.
[10] Chutatape O, Guo L.A modified Hough transform for line detection and its performance[J].Pattern Recognition, 1999, 32(2): 181-192.
(编辑阳丽霞)
Detection of catenary steady clamp based on image processing
ZHANG Chunchun, WANG Song, ZHANG Dongkai, ZHOU Sheng
(School of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
Abstract:With the development of catenary fault detection technology, catenary suspended state detection and monitoring device can obtain massive high-definition images for offline troubleshooting.Based on image processing technology, this paper proposed an algorithm of steady clamp detection method according to the structure features toimprove the detection efficiency and accuracy.By applying the method to practical image databases, the results show that the method could achieve good performance and detection accuracy rate could reach 90%.Even for poor quality image such as background complex, noisy, underexposure or overexposure, the effectiveness and generality of the method are still reliable.The algorithm greatly improved the detection efficiency and lay the foundation for further defect detection, of great practical engineering significance.
Key words:catenary detection; image processing; fault detection; steady clamp
通讯作者:王嵩(1983-),男,山西太原人,讲师,博士,从事电机控制、故障检测研究;E-mail: songwang@swjtu.edu.cn
基金项目:中央高校基本科研业务费专项资金资助项目(2682014CX028)
收稿日期:2015-06-28
中图分类号:U216.3
文献标志码:A
文章编号:1672-7029(2015)06-1478-07