空间SRT混合仿真试验方法的精度和稳定性分析
2016-01-22张兴虎游少建
隋 ,马 磊,张兴虎,游少建
(1.西安建筑科技大学土木工程学院,陕西 西安 710055;2.西部建筑科技国家重点实验室(筹) ,陕西 西安 710055;3.美国MTS系统公司,美国明尼苏达州 伊甸园市 55344)
SRT(soft real-time)混合仿真试验方法是一种能够更真实模拟试件受地震作用的实时效应及其力学性能与加载速度有关的一种新型抗震试验方法[1].它将有限元数值模拟和实验室构件试验相结合,能够以较小的成本真实模拟结构在地震荷载下的动力响应,现已成为国内外研究结构抗震的热点,也是未来结构抗震试验方法的一种趋势[2].
1 SRT混合仿真试验方法的系统组成及原理
SRT混合仿真试验需要系统的各个组成部分协调工作才能达到较好的精度要求.SRT混合仿真试验系统由数值模拟计算机、目标计算机、试验计算机、电液伺服控制器和电液伺服作动器组成,如图1所示.数值模拟计算机装有有限元软件OpenSees,主要进行整体结构建模和结构动力反应求解,数值积分算法包含OS法、Newmark法等.目标计算机主要用于试验子结构位移的预测和校正,使得其在指定时刻到达指定位移,实现实时动力加载.电液伺服控制器主要承担向油源发出控制加载指令、管理数据采集系统接收反馈数据和向主控制计算机传送数据等工作.试验计算机是对电液伺服控制器进行控制、管理和数据采集工作.电液伺服作动器用于执行加载指令[3].

图1 SRT混合仿真流程图Fig.1 Soft real-time simulation flow chart
作动器从接到指令到到达指定位置必然需要一定的时间,这个时间称为时滞[4].如果作动器在指定时间未到达指定位置,必然会带来误差.SRT混合仿真试验方法的特点是若作动器在指定时间到达指定位置,系统按实时进行加载;若作动器在指定时间未到达指定位置,系统会延长计算步长时间直至作动器到达指定位置[5].相比 RT(real-time)混合仿真试验对时限的严格要求,SRT混合仿真试验在加载时程精度方面有可能降低,但试验基本满足实时加载要求,也不会影响试验的稳定性[6].
2 SRT混合仿真试验模型及加载
SRT混合仿真试验试验模型选用单层单跨空间钢结构框架[7-8],柱与基础为刚接,梁柱构件选用相同材料的型钢,HW200×200×8×10,横截面面积5 400 mm2,弹性模量和剪切模量为 206 MPa和79MPa,Ix和Iy为 4.002E+7 mm4、1.334E+7 mm4,模型示意图如图 2.本次试验,时间、位移、加速度、质量的单位分别为s、mm、gal、和106 Kg,节点2、4、6、8上有集中质量,质量等级为5 t.
MTS电液伺服作动器沿x、y两个方向对试验子结构钢柱柱端进行加载,由于轴压比比较小,不施加竖向荷载,如图3所示.x、y两个方向输入的地震波选用EL-Centro(NS,1940)加速度记录.试验过程中,各工况阻尼值均为0.01,加速度峰值有(55、110、220、400)gal ,试验工况详见表1.
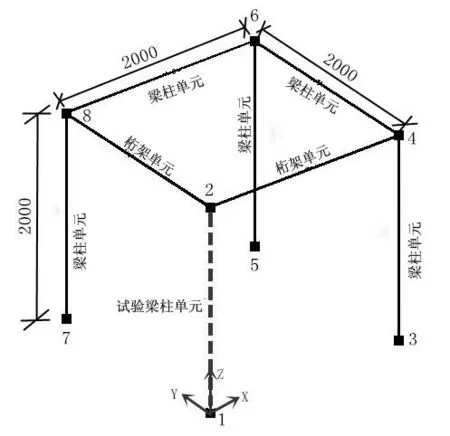
图2 模型示意图Fig.2 Model sketch picture
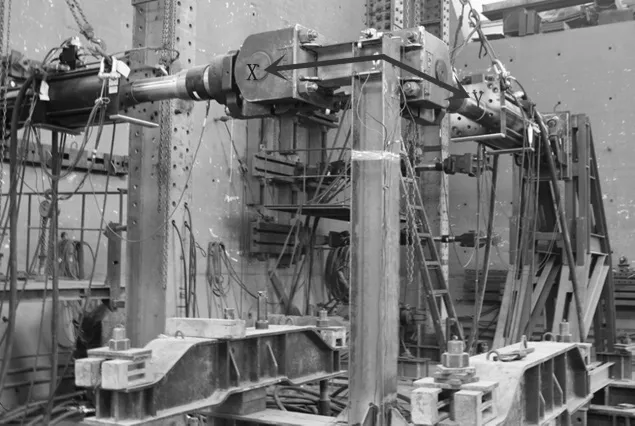
图3 模型加载图Fig.3 Test setup

表1 SRT混合仿真试验工况Tab.1 SRT hybrid simulation test conditions
在 OpenSees中建立整体数值结构模型进行模拟分析[9-10],并将模拟分析中的柱端位移定义为“计算位移”,SRT混合仿真试验中柱端目标位移定义为“命令位移”,作动器实际反馈的位移定义为“反馈位移”.各工况的计算与命令位移时程曲线如图4所示,命令与反馈位移时程曲线如图5所示[11].

图4 计算与命令位移时程曲线Fig.4 Displacement responses of simulation and command

图5 计算与命令位移时程曲线Fig.5 Displacement responses of simulation and command
3 结果分析
将“计算位移”、“命令位移”和“反馈位移”进行比较.
(1)各工况“计算位移”和“命令位移”的峰值见表2,峰值差趋势图如图6所示.由表2和图6可见随着地震激励的增大,峰值差越来越大,最大在54%.
分析原因是随着地震激励的增大,作动器加载速率同时增大,结构阻尼作用越来越大,试验中体现出的作用更明显.
(2)各工况“命令位移”和“反馈位移”的峰值见表3,峰值差趋势图如图7所示.从表3和图7的对比结果可见,命令峰值和反馈峰值的误差在0.71% ~ 28.93%之间,加载的精确度受到作动器动态性能调试技术PID(比例积分控制器)和实时补偿技术Simulink predictor-corrector的制约.
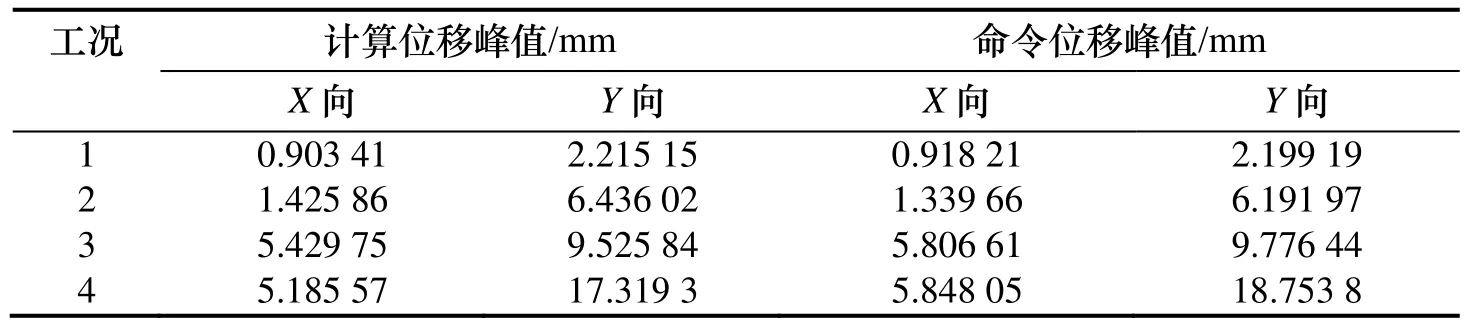
表2 各工况计算位移和命令位移峰值Tab.2 Peaks of simulation and command displacement at all conditions
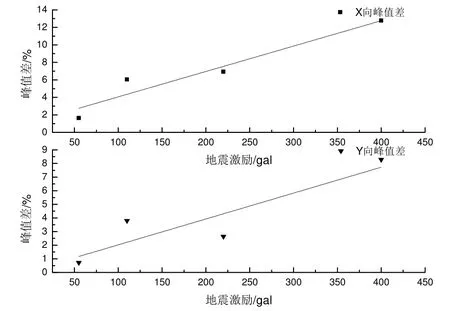
图6 计算与命令位移的峰值差Fig.6 The differential peak of simulation and command displacement
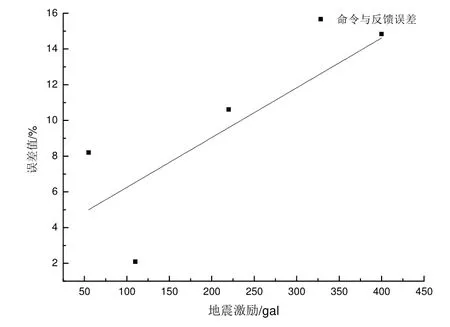
图7 命令与反馈位移误差值Fig.7 The error value of command and feedback displacement
4 结论
本文介绍了SRT混合仿真试验的系统组成和原理,通过单层单跨空间钢结构SRT混合仿真试验对该试验方法精度和稳定性的影响因素进行了分析,结论如下:
(1)作动器动态性能调试技术和实时补偿技术对加载的精度及稳定性有较大影响;
(2)地震激励的大小对试验的精度及稳定性有较大影响.
References
[1] 邱法维.结构抗震实验方法进展[J].土木工程学报,2004(10):19-27 QIU Fawei. Developments of seismic testing methods for structures[J]. China Civil Engineering Journal,2004(10):19-27
[2] 何政,蒋碧聪.OpenSees混合模拟试验技术发展与应用[J].力学进展,2012(6):804-820.HE Zheng, Jiang Bicong. Development and applications in hybrid simulation and experimentation using OpenSees[J]. Advances in Mechanics,2012(6):804-840.
[3] 张兴虎,马磊,隋龑,等.空间结构SRT混合仿真试验技术研究[J].西安建筑科技大学学报(自然科学版),2014,46(6) :329-332 ZHANG Xinghu,MA Lei,SUI Yan,et al.Research on the SRT hybrid simulation test technology in spatial structure[J]. J. Xi'an Univ. of Arch. & Tech. (Natural Science Edition),2014,46(6) :329-332
[4] 徐伟杰,郭彤,陈城.实时混合模拟试验时域指标的比较分析[J].结构工程师,2013(2) :181-188 XU Weijie,GUO Tong,CHEN Cheng.Comparison and Analysis of Time Domain Indices of Real-time Hybrid Simulation[J].Structural Engineers,2013(2) :181-188
[5] 潘鹏,王涛,中岛正爱.在线混合实验进展:理论与应用[M].北京:清华大学出版社,2013.PAN Peng, WANG Tao, NAKASHIMA Masayoshi. Development of online hybrid test-theory and applications[M].Beijing:Tsinghua University press,2013.
[6] 吴斌,王倩颖.实时子结构实验的研究进展[J].实验力学,2007(12):547-555.WU Bin, WANG Qianying. Development of Real-time Substructure Testing[J]. Journal of Experimental Mechanics, 2007(12):547-555.
[7] Nakashima M, Takai H. Use of substructure techniques in pseudo dynamic testing[J]. BRI Research Paper,1985,111:350-365
[8] McKenna F. Object-oriented finite element analysis:frameworks for analysis, algorithms and parallel computing[D].Berkeley: University of California, 1997: 10-12.
[9] Mazzoni S, McKenna F, Scott M H,Fenves G L.OpenSees user manual[R].PEER: University of California at Berkeley, 2000.
[10] SCHELLENBERG A, KIM H K, TAKAHASHI Y, et al.OpenFresco Command Language Manual[M]. PEER:The Regents of the University of California, 2009: 5-34.
[11] 孟凡涛,赵建峰,于广明.实时子结构混合试验中的数值积分方法对比分析[J].地震工程与工程振动,2011(10):61-67 MENG Fantao,ZHAO jianfeng,YU Guangming.Study on numerical integration methods in real-time hybrid testing experiment[J].Journal of Earthquake Engineering and Engineering Vibration,2011(10):61-67.
