基于纵向避撞时间的预警/制动算法
2016-01-18于广鹏谭德荣田厚杰吕长民
于广鹏,谭德荣,田厚杰,吕长民
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
基于纵向避撞时间的预警/制动算法
于广鹏,谭德荣,田厚杰,吕长民
(山东理工大学 交通与车辆工程学院,山东 淄博 255049)
摘要:针对汽车纵向避撞系统的要求,提出了一种基于纵向避撞时间的纵向碰撞预警/避撞(FCW/FCA)算法。通过分析纵向避撞时间与驾驶员反应时间之间的关系,建立了前车不同行驶工况条件下的安全车距模型,并在3种不同行驶工况下,与Berkeley模型进行制动/预警距离的对比。研究结果表明:该算法确定的制动距离与Berkeley模型确定的距离相差很小,并且考虑了前车的运行工况;该算法还能够根据前车行驶工况的不同,确定出合理的预警距离。对比分析结果验证了该算法的有效性和可行性,能够提高车辆行驶的安全性。
关键词:汽车工程;汽车主动安全;避撞时间;反应时间;驾驶倾向;安全车距
基金项目:国家自然科学基金项目(61074140);山东省自然科学基金项目(ZR2011EEM034)
作者简介:于广鹏(1989-),男,回族,山东德州人,硕士生;谭德荣(1963-),男,山东淄博人,教授,博士,硕士生导师,主要从事智能交通和载运工具等方面的研究.
收稿日期:2014-10-11
文章编号:1672-6871(2015)02-0030-05
中图分类号:U491
文献标志码:志码:A
Doi[2]A,Bustuent T,Niibe T,et al.Development of a Rear End Collision Avoidance System with Automatic Braking Control [J].JSAE Review,1994,15(4):335-340.
0引言
避撞算法是汽车防碰撞系统的核心,它的主要作用是确定系统的启动时间以及相应的启动逻辑。现有的避撞算法主要有安全时间逻辑算法和安全车距逻辑算法。安全时间逻辑算法是通过比较两车间的碰撞时间与安全时间阈值,来确定车辆的安全状态,具有代表性的是日本东京农工大学的避撞时间(TTC)模型[1]。安全车距逻辑算法是指在当前行驶条件下,汽车紧急制动不至于与前方车辆或障碍物发生碰撞的最小安全距离,具有代表性的有固定车距模型[2]、固定车间时距模型和运动学模型[3]。
近年来,国内外学者对防碰撞系统的预警/避撞算法进行了深入的研究,并取得了一些成果。例如,比较经典的马自达(MAZDA)制动模型和美国国家公路交通安全管理局(NHTSA)预警模型[4-5],这两种模型都是根据车辆的相对运动关系确定安全车距,但这些模型并没有考虑前车不同的运行工况。清华大学的张磊利用车辆安全程度值Csafe来反映驾驶员对制动的控制习惯,并建立了基于驾驶员跟车习惯的报警/避撞算法,在一定程度上能够满足不同驾驶员的需求,但其只考虑了驾驶员的跟车习惯,并没有考虑前车的运行工况[6]。北京理工大学的裴晓飞通过对避撞时间倒数(TTC-1)的分析研究,建立了以危险系数ε的判断阈值的分级报警与主动制动的安全距离模型,驾驶员可以根据自己的驾驶风格预先选择“保守”、“适中”或“激进”模式,在一定程度上适应了不同驾驶员的需求[7-9]。清华大学的王建强通过真实道路试验,提出了适应驾驶员特性的基于避撞时间(TTC)的汽车追尾报警-避撞算法,并利用聚类分析方法将驾驶员分为谨慎、正常、激进3种类型,以不同驾驶员的释放加速踏板时刻和启动制动踏板时刻作为系统的预警和制动阈值[10-13]。
基于上述分析,本文提出了一种基于纵向避撞时间的纵向碰撞预警/避撞(FCW/FCA)算法,用以解决适应不同行驶工况条件下的安全车距问题。首先,根据纵向避撞时间与驾驶员反应时间之间的关系建立了预警/制动模型;然后,根据前车运行工况计算出相应的安全预警距离,对驾驶员进行实时预警,并根据制动距离对车辆进行实时制动。
1汽车制动过程分析
安全时间逻辑算法中常用的两个特性参数为跟车时距(THW)和避撞时间(TTC),这两个特征参数都是基于车辆的相对运动状态定义的。
THW定义[1]为:
(1)
其中:D为两车车距;vf为跟随车车速;THW参数的量纲为s。
TTC定义[2]为:
(2)
其中:D为两车车距;vr为两车的相对车速;TTC参数的量纲为s。
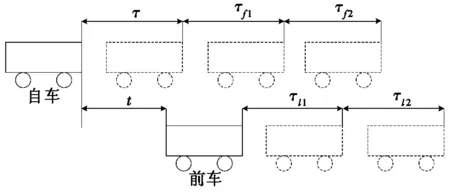
图1 汽车制动过程分析图

当前车从制动到停止时,自车也正好从制动至停止,则会有如下等式:
t1+t=t2。
(3)
将变量带入式(3)化简得:
t=τ+(τf1-τl1)+(τf2-τl2)。
(4)
上式进一步可以化简为:
(5)

为了确定参数k的具体值,设计了如下实车试验。选取50名驾驶员进行了实车试验,试验场地为市内某一路段,试验过程中两辆试验车分别以相对车速为10 km/h、20 km/h、30 km/h、40 km/h和50 km/h的速度行驶。当驾驶员认为存在碰撞危险时,便可进行制动减速,此时记录两辆车之间的车距。根据不同的相对车速下的两车距离,利用式(6)可以求出相应的避撞时间,再利用式(5)可以求出相应的k值,部分试验数据如表1所示。
。 (6)
经计算,参数k≈0.48,为了方便计算,本文取k=0.5。
2报警逻辑算法
由式(5)可以得出避撞时间与驾驶员反应时间之间的关系。通过分析发现:
(Ⅰ)当自车和前车进入跟驰状态,若两车的车速是相等的,即vr=0,此时根据TTC计算两车的避撞时间t,t会趋向无穷大,等式(5)永远不会成立。因此,当两车进入同速跟驰行驶时,应根据THW求出的跟车时距代替避撞时间,非同速跟驰行驶时利用TTC求解避撞时间。
(Ⅱ)避撞时间的确定,如果以两车制动至停车时刚好不发生碰撞为临界点,则汽车实际制动过程中有可能发生碰撞。理想的算法应该使汽车制动至停止时自车和前车之间留有一定的安全停车距离,一般取2~5 m,本文取3 m。则避撞时间的求取可以转化为式(6)。
(Ⅲ)当前车的运行工况变化时,式(5)的形式是不一样的。下面根据不同的前车运行工况,对式(5)进行化简。
(i)前车静止工况
前车静止时vl=0,只有自车存在制动过程,即τl1=τl2=0,则式(5)可以化简为:
(7)


(8)
(ii)前车紧急制动
当前车紧急制动时,自车制动减速度线性增长时间段车速减少量可以计为△vf=0.5afτ″f1,前车制动减速度线性增长时间段内车速的减少量可以计为△vl=0.5alτ″l2;另外,同类车型制动器作用时间可以认为近似相等,即τf1=τl1。将速度减少量带入式(5)可以简化为:

(9)
(iii)前车匀速行驶
当前车匀速行驶时,前车车速vl是固定不变的,自车行驶的安全临界判定条件为自车车速vf减到与前车车速vl相等时所需的时间与碰撞时间之间的关系。此时前车不存在制动减速过程,则式(5)可以化简为:
(10)
式(10)最终可以化简为:

(11)
根据以上分析,前车静止和前车匀速行驶时可以归为一个公式。最后,利用式(6)将避撞时间转化为对应的车距并将变量标准化。相应的安全预警/制动算法如式(12)和式(13)所示。
前车紧急制动工况:
(12)
前车静止/匀速行驶工况:
(13)
式中:Dw为预警车距;Db为制动车距;vr为相对车速;τ为驾驶员反应时间,本文取值为1.2 s;τ1为自车制动器作用时间,其值为0.5 s;τ2为制动器线性增长时间,其值为0.2 s;vf和vl分别为自车和前车车速;af和al分别为自车和前车制动减速度。
3仿真对比分析
考虑到实车试验的危险性以及可行性,通过Matlab软件仿真将本文提出的制动/预警算法与经典的安全车距模型进行对比分析。其中,MAZDA模型报警时机比较早,过于保守;本田(HONDA)模型报警时机比较晚,过于激进;而Berkeley模型综合了上述两模型的优点,报警时机比较适中[11]。因此,本文选取Berkeley模型,利用软件进行对比分析,其预警/制动模型如式(14)所示[11]。
(14)
式中:τ为驾驶员反应时间,其取值1.2 s;v1和v2分别为自车和前车车速;a为前车制动减速度;d为最小停车安全距离,其值为d=3。
3.1 前车紧急制动工况
图2为前车紧急制动工况下两算法对比分析图。通过图2可以看出:预警距离对比中,不同相对车速下,本文所建立的模型计算的预警距离与Berkeley模型计算的预警距离比较接近。制动距离对比中,当前车紧急制动时,Berkeley模型计算的制动距离失效,即前车紧急制动工况下其确定的制动距离不够准确;而本文建立的模型所计算的制动距离不仅能够使前车紧急制动,而且能适应不同相对车速下的安全车距要求。
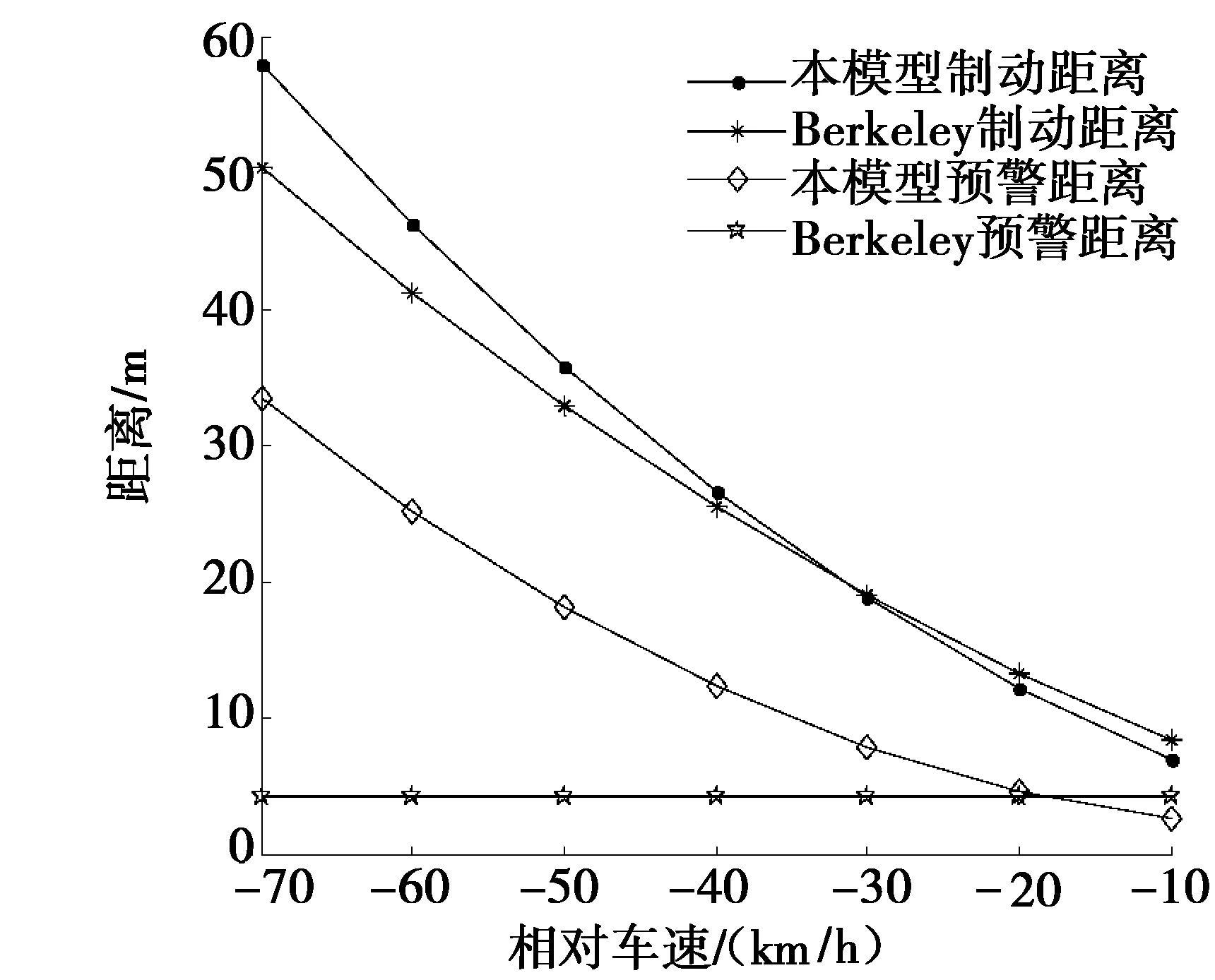
图2 前车紧急制动工况下两算法对比
3.2 前车静止工况
图3为前车静止工况下两算法对比分析图。通过图3可以看出:预警距离对比中,本文所建立的模型计算的预警距离与Berkeley模型计算的预警距离高度拟合。制动距离对比中,低速行驶时,本文所建立的模型计算的制动距离与Berkeley模型计算的比较接近;而高速行驶时,本文建立的模型计算的制动距离趋于保守,这样可以确保高速行驶时车辆的行驶安全。
3.3 前车匀速行驶工况
图4为前车匀速行驶工况下两算法对比分析图。预警距离对比中,Berkeley模型确定的预警车距随相对车速的变化较小,并且相对车速较高时容易造成报警不及时,在相对车速较低时容易造成虚警;而本文建立的模型计算的预警距离能够确保不同相对车速下车辆的行驶安全。制动距离对比中,本文建立的模型计算的制动车距与Berkeley模型相比,相对车速较高时有较高的安全性,相对车速较低时有较低的虚警率。
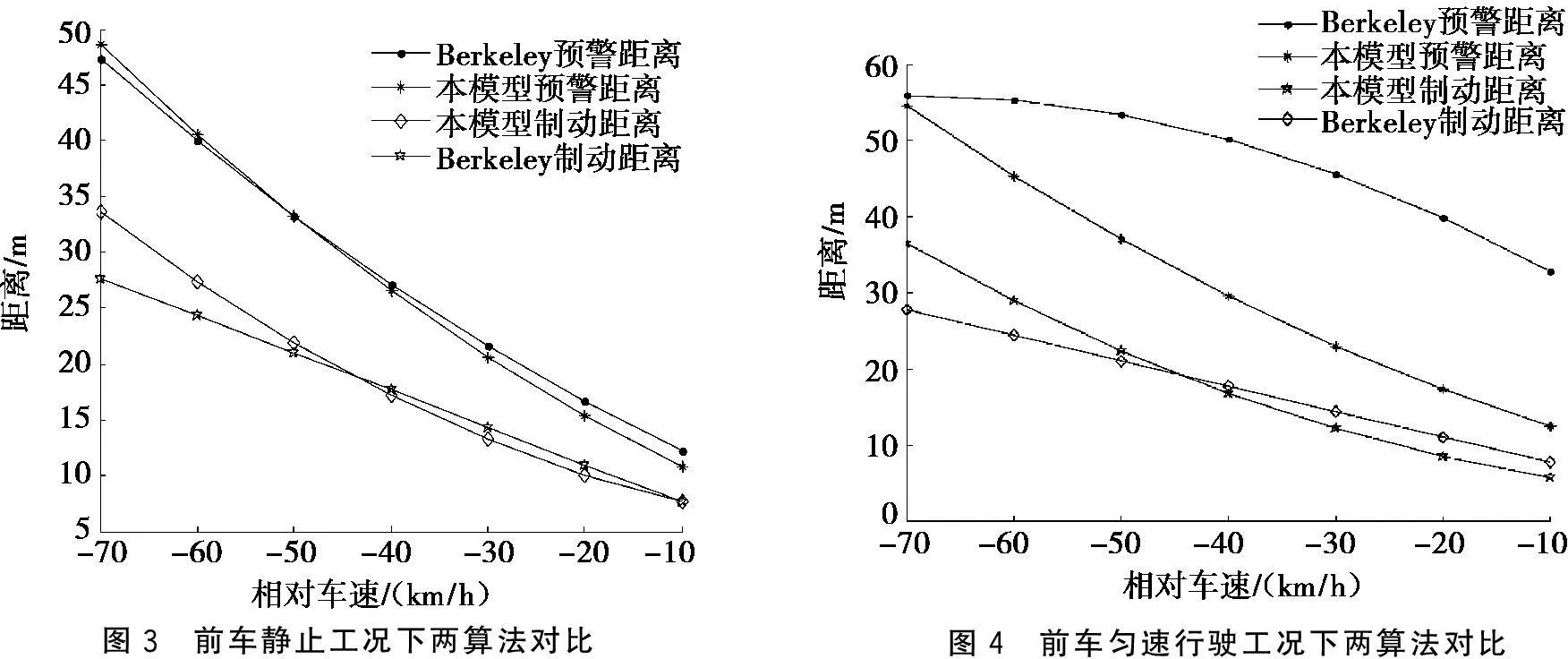
图3 前车静止工况下两算法对比 图4 前车匀速行驶工况下两算法对比
4结论
本文通过分析纵向避撞时间与驾驶员反应时间的关系,建立了相应的预警/制动算法。该算法不仅考虑了前车不同工况下所需要的安全预警/制动距离,而且在不同行驶工况下,确定的预警/制动距离与Berkeley模型比较接近,在一定程度上能够改善道路交通状况,提高道路通行效率。
参考文献:
[1]王建强,迟瑞娟,张磊,等.适应驾驶员特性的汽车追尾报警-避撞算法研究[J].公路交通科技,2009,23(1):23-28.
[3]Miller R,Huang Q.An Adaptive Peer-to-peer Collision Warning System[C]//Vehicular Technology Conference,2002.VTC Spring 2002.IEEE 55th.IEEE,2002,1:317-321.
[4]Lee K,Peng H.Evaluation of Automotive Forward Collision Warning and Collision Avoidance Algorithms[J].Vehicle System Dynamics,2005,43(10):735-751.
[5]张磊,王建强,李克强,等.基于驾驶员跟车习惯的报警/避撞算法研究[J].汽车工程,2006,28(4):351-355.
[6]裴晓飞,刘昭度,马国成,等.汽车主动避撞系统的安全距离模型和目标检测算法[J].汽车安全与节能学报,2012,3(1):26-33.
[7]Winsum W V.The Human Element in Car Following Models[J].Transportation Research Part F:Traffic Psychology and Behaviour,1999,2(4):207-211.
[8]Chen Y L,Shen K Y,Wang S C.Forward Collision Warning System Considering Both Time-to-Collision and Safety Braking Distance[C]//2013 IEEE 8th Conference on Industrial Electronics and Applications(ICIEA).2013: 972-977.
[9]洪亮,葛如海,宫燃,等.汽车保险杠低速碰撞安全性能优化[J].河南科技大学学报:自然科学版,2013,34(6):32-35.
[10]王晓原,张敬磊,Ban X G.基于动态人车环境协同推演的汽车驾驶倾向性辨识[M].北京:科学出版社,2013:61-65.
[11]张广祥.基于驾驶行为的汽车主动防撞预警系统的安全车距研究[D].长春:吉林大学,2011.
[12]宋晓琳,冯广刚,杨济匡.汽车主动避撞系统的发展现状及趋势[J].汽车工程,2009,30(4):285-290.
[13]裴晓飞,齐志权,王保锋,等.一种汽车前向主动避撞策略研究[J].吉林大学学报:工学版,2013,43(5):54-61.

