基于AFDX的航电激励系统的研究
2016-01-18詹湘琳韩红斌马腾达
詹湘琳,韩红斌,马腾达
(中国民航大学 航空自动化学院,天津 300300)
航空电子系统,简称航电系统,它的仿真验证是飞机航电系统开发与设计过程中十分重要的一个环节。通过航电系统的仿真验证可大大缩短研制周期并降低整个航电系统集成的风险和成本[1]。航电系统需要一些激励信号,也就是仿真过程中的数据,这就需要设计一个航电激励系统来为其提供这些激励信号。而在仿真过程中,激励系统扮演着一个很重要的角色,它相当于整个仿真系统的心脏,准确地将各仿真组件需要的数据传输给它们。
AFDX是波音和空客公司通过已经实现商业用途的以太网技术来建立的下一代航空数据总线,它是基于IEEE802.3以太网通讯技术来实现的,但是采用了虚拟链路技术和数据冗余来保证带宽和服务质量。AFDX拥有100 M/s的带宽,并且利用光纤进行通信,相比于ARINC429总线,AFDX具有更大的带宽,并且可以减轻飞机的重量[2]。AFDX更加能适应新型航电系统发展的趋势,一些新型飞机,如A380、B787已经开始应用AFDX作为其航空电子系统的数据总线[3]。但由于ARINC664协议中有很多地方的叙述都不太明确,所以很多针对AFDX的研究都停留在对协议的分析阶段和单个端系统的设计和测试上[4]。而整个航电系统的仿真测试都是基于AFDX的航电仿真系统还比较少。而对于应用AFDX技术的新型飞机来说,这显然是不够的,本文通过对ARINC664协议进行分析,在此基础上对基于AFDX的航电激励系统进行了研究。
1 AFDX简介
AFDX全称为航空电子全双工交换式以太网,是一种新型的航空数据总线,主要由端系统、交换机组成,并采用了虚拟链路技术。其中端系统是航电子系统用于接入网络的接口设备,通过端系统接口航电子系统可以在AFDX网络上进行数据的接收和发送。交换机负责在网络中进行帧过滤、流量管理以及根据目的地址进行数据转发。虚拟链路是AFDX网络中端系统与端系统之间的一种逻辑上的通信通道,用来建立起由一个源端系统到一个或多个目标端系统之间的一条单向的逻辑通信路径。其结构如图1所示,航空电子子系统通过端系统连接到AFDX网络,并通过虚拟链路进行数据交互。
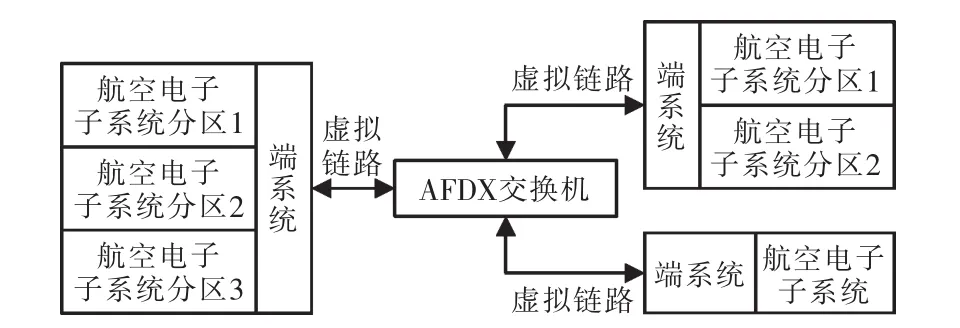
图1 AFDX中的交换机和端系统Fig.1 Switch and end system of the AFDX
AFDX基于商用以太网标准,采用全双工交换网络拓扑结构避免商用以太网传输延迟的不确定性,增加冗余提高网络的可靠性,并且在ARINC664协议的第7部分对AFDX的协议标准进行了详细的叙述。AFDX拥有100 M的带宽,由管理者自由分配给每一条虚拟链路。AFDX帧的长度为64~1518B,其帧结构如图2所示,其中以太网帧头主要包括目的MAC地址、源MAC地址、IP类型,其中目的MAC地址包含虚拟链路ID,源MAC地址包含用户定义ID和接口ID;IP报头主要包含版本、报头长度、服务类型、总长度、标识、片偏移、生存周期、传输层协议和头部校验和等信息,以及源IP地址和目的IP地址;IP数据段主要包括UDP报文头和UDP数据字段,UDP报文头包含源端口、目的端口、长度和校验和,UDP数据字段为负载数据和帧序列号,负载数据不满17 B时,填充0,负载数据不超过1471 B,帧序列号SN为1~255,帧校验为CRC校验。

图2 AFDX帧数据结构Fig.2 Frame data structure of AFDX
2 基本结构与功能
2.1 功能分析
在航电系统进行仿真和集成验证时,航电激励系统需要通过AFDX总线为各个航电组件按照一定的要求提供激励信号,并对航电组件的响应信号进行接收和处理。在系统仿真过程中,能够依据需求进行动态仿真和静态仿真。根据航电系统对激励参量的需求,航电激励系统通过AFDX总线为航电组件提供ARINC429、离散量等激励信号,如VOR、ILS、VHF、HF的调谐频率,空地信号等参量。
2.2 系统设计原则
航电系统的趋势是综合化、模块化、信息化和智能化,航电系统从最初的开发到投入使用的整个生命周期内,会发生一系列的变化,激励系统也要做出相应的调整。总结出如下总线激励系统在设计时应当遵循的主要原则:
(1)灵活性原则。航电系统的仿真验证过程中,也伴随着航电系统的更新换代,因此在对航电设备提供激励信号时,应当考虑到当提供的激励参量、激励形式都有可能发生变化时,总线激励系统能够灵活的做出适应;
(2)开放性和可扩展性原则。随着新技术的不断发展,一些新的设备被不断制造出来,总线激励系统应当具备开放性和可扩展性,支持新设备的加入;
(3)通用性原则。不同型号的飞机的航电系统不尽相同,但其航电系统的开发、集成验证具有相同的设计原则和设计方法,总线激励系统的设计,应当能够适应不同型号飞机的具体要求。
2.3 系统结构
该激励系统采用开放式的工控机机箱,并在此基础上配置AFDX板卡,并通过该板卡提供的接口函数来实现AFDX数据的接收和发送。如图3所示为通信导航组件的仿真验证过程中激励系统与各通信导航组件的连接图。该平台由激励系统、飞行仿真系统、RDC以及通信导航组件组成,其中RDC为远程数据集中器,在新型飞机上已经得到应用,其作用为将AFDX总线数据转换为离散量及ARINC429总线数据或者将离散量及ARINC429总线数据转换为AFDX总线数据,RDC会提前加载配置文件,依据该文件中的规定的转发规则将转换的数据发送到正确的端口。激励系统通过以太网从飞行仿真系统里接收飞行参数,并将其转化为激励信号,通过AFDX发送到RDC,并由其转化为429信号并转发到各仿真组件。激励系统可同时对左右导航通信组件进行激励,如果再对其他系统、组件或模块进行验证的话只需在激励系统中添加相应的激励信号即可。
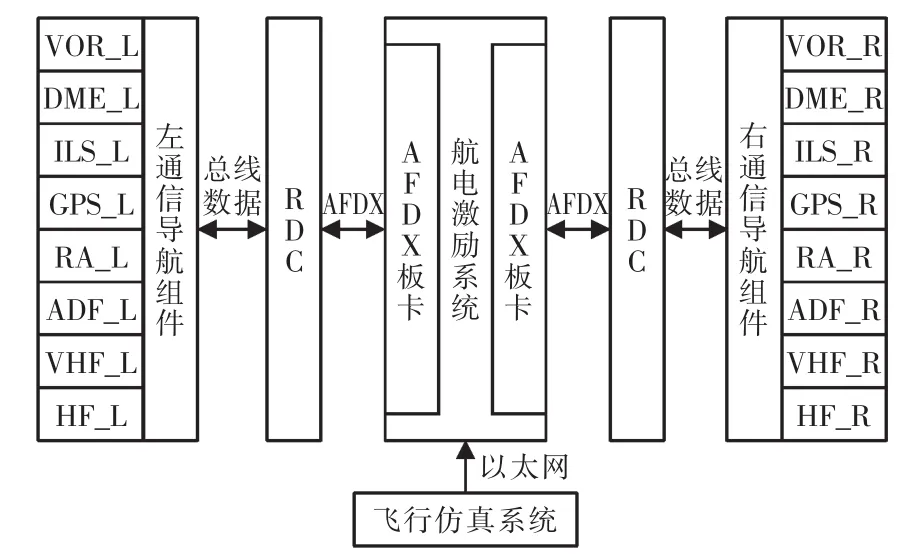
图3 各系统连接示意Fig.3 Schematic diagram of the system connection
3 AFDX数据的发送和接收模块设计
本文通过分析ARINC664协议,设计了AFDX的发送接收模块,激励系统通过这2个模块来与各个组件之间进行通信,并且这2个模块符合ARINC664协议中关于AFDX发送和接收的规定。
3.1 发送模块设计
发送模块主要包括流量整型、虚拟链路调度和冗余管理3个功能模块。如图4所示为发送模块的结构框图。
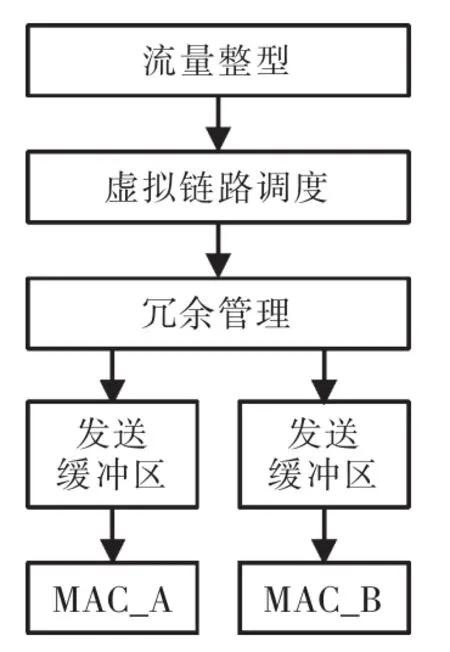
图4 发送模块结构Fig.4 Sending module structure diagram
AFDX拥有100 M的带宽,分配到每条虚拟链路主要是以BAG和这2个参数来表示的,其中BAG是带宽分配间隔,是同一条虚拟链路中2个相邻的帧起始二进制位之间最小的时间间隔,是虚拟链路上可传输的AFDX帧的最大长度。流量整型的作用主要是将数据的帧间距调整到该组数据发送的虚拟链路的BAG值。通过流量整型可以使不同虚拟链路传输的数据不会发生碰撞。
虚拟链路调度是为了保证各种数据传输的实时性。飞机上传输不同的数据对实时性的要求也不相同,主要有3种类型,第一种是无周期但对实时性要求比较高的数据,如告警等;第二种是周期性的对实时性有一定要求的数据,如各个传感器信号等;第三种是非周期性的对实时性要求不高的数据,如维护文件等。这样就要为不同的实时性要求的信号提供相应的调度策略,本文采用基于静态优先级的轮询调度算法来实现虚拟链路的调度,通过给实时性要求高的虚拟链路设计比较高的优先级使得在一个轮询周期内能够多次检查该虚拟链路的数据缓冲区,并以此保证达到其对实时性的要求。在输出模块中,对于给定的某个虚拟链路,数据帧能够在某个有界的时间间隔中出现。
冗余管理是为了保证其AFDX的可靠性。数据通过2个互为冗余且完全分离的网络(网络A和网络B)到达目标端系统,这样即使在数据传输过程中有一个网络出了问题,数据还可以通过另外一个冗余网络来保证正常通信,使得航电系统的正常工作不受影响。
AFDX数据经过以上3个功能模块,保证了整个传输过程中数据的正确性和可靠性。
3.2 接收模块设计
接收模块主要包括完整性检查和冗余管理2个功能模块。如图5所示为接收模块的结构框图。
接收模块通过检查每个帧的SN来检查数据的完整性。由上文可知,每个AFDX数据都包含有1 B的SN字节,AFDX就通过SN对虚拟链路上的每个帧进行顺序编号,在进行AFDX接收时通过对SN进行检查来判断接收的数据是否完整有效。接收模块的冗余管理的作用是消除冗余帧。冗余管理模块一般采用“先到先使用”的策略,即先接收的帧为有效帧,丢弃其冗余帧。通过这2个功能模块,保证了接收数据的完整性和有效性。
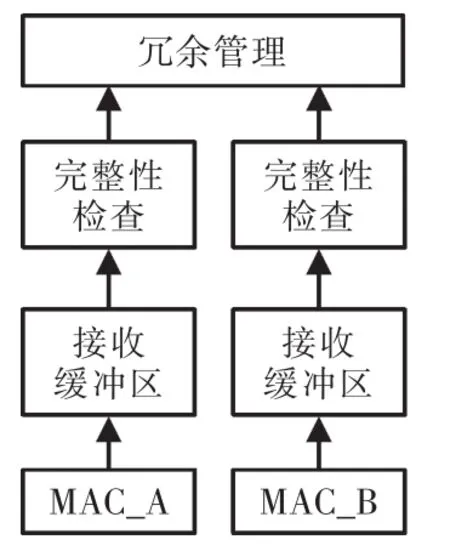
图5 接收模块结构Fig.5 Receiving module structure diagram
4 系统软件结构设计
4.1 软件流程图
根据激励系统的设计思想和要求,激励系统运行时首先进行软件和硬件的初始化,然后由用户确定需要进行的仿真类型,即是从飞行仿真系统读取环境数据,还是从用户输入获得数据。激励系统将环境数据进行编码,通过AFDX总线按照预先配置好的发送方式及通过的虚拟链路发送到对应的组件,接收组件的响应信号并进行显示。系统流程如图6所示。
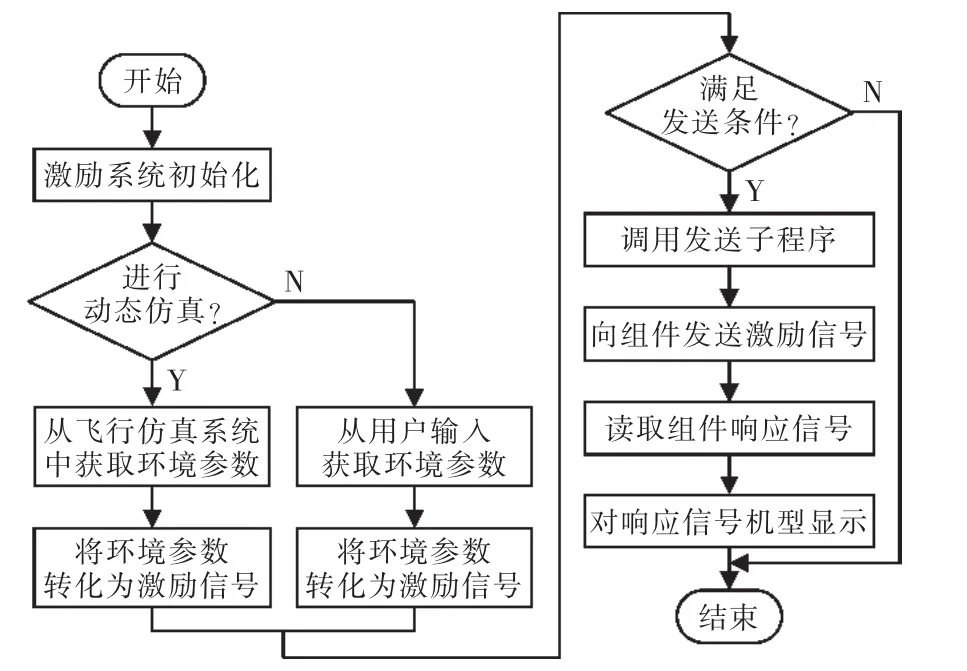
图6 激励系统的软件流程Fig.6 Software flow chart of the incentive system
4.2 软件结构
本文设计的激励系统的软件包括激励控制模块、响应显示模块、综合显示模块和总线监视模块。
激励控制模块主要作用是将环境数据转化为激励参量,编码为AFDX总线数据,并通过激励系统的发送模块发送到对应的组件。在激励系统主控软件的编写过程中,充分参考了ARINC664协议及ICD文档,编写了AFDX数据总线的编解码动态链接库,并通过该动态链接库进行AFDX数据的编解码。静态仿真主要是为了激励系统的调试工作,用户可自由设置AFDX数据中包含的所有信息,通过显示数据来判断真实数据是否符合要求;动态仿真是为了测试激励系统的整体功能,激励系统从飞行仿真系统获得环境数据,并将其编码为AFDX数据,通过预先加载的配置信息,将编码好的数据按照固定的发送方式和通过的虚拟链路发送到对应的航电仿真组件。响应显示模块的作用为接收仿真组件对激励信号的响应,对组件的响应信号进行解码,并将其详细的显示出来。环境参数显示模块能够对环境参数进行显示。总线监视系统的作用是将激励系统发送的激励信号和接收的响应信号进行详细显示,包括源设备、目标设备、通过的虚拟链路号、源IP地址、目标IP地址、源端口、目标端口及解码出的数据等。如图7所示为在C++环境下编写的激励系统的主控程序,通过该程序的运行来控制激励系统的运行状态。
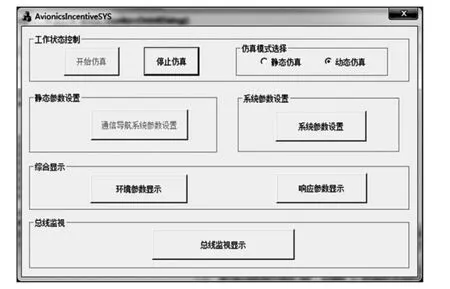
图7 激励系统主控程序界面Fig.7 Main control program interface of the incentive system
5 结语
AFDX作为新一代的航空数据总线,具有带宽大、可靠性好、安全性高等优点。本文在此基础上对基于AFDX的航电激励系统进行了研究,采用模块化的设计思想,满足了系统灵活性、可扩展性和通用性的设计要求。通过仿真实验验证,该激励系统能够很好地为某型飞机的航电系统提供需要的激励信号,完成了某型飞机航电系统地面测试的要求。
[1]周德新,彭妮娜,马腾达.航电仿真系统集成验证平台设计方法研究[J].自动化与仪表,2015,30(3):1-5.
[2]许燕婷.AFDX端系统协议栈虚拟链路层分析及仿真研究[D].上海:上海交通大学,2011.
[3]姜丽云.AFDX网络关键技术研究[D].西安:西安电子科技大学,2013.
[4]石锋.航空电子全双工交换式以太网编址方案设计[J].电讯技术,2009,49(9):59-62.
