两叶片变速风力机组避免塔架共振控制策略
2016-01-15宋冬然,杨建,董密等
第一作者宋冬然男,博士生,1983年生
通信作者杨建男,博士,副教授,1978年生
两叶片变速风力机组避免塔架共振控制策略
宋冬然1,杨建1,董密1,晏勤2,张博2
(1.中南大学信息科学与工程学院,长沙410083;2.广东明阳风电产业集团有限公司,广东中山528437)
摘要:变速风力发电机组中塔架固有频率及叶轮旋转频率一致会致机组出现共振现象。为避免共振,设立转速禁区控制风力发电机组快速通过共振区间。在研究分析两种不同基于转速禁区控制策略基础上,提出适合两叶片风电机组避免塔架共振控制方案。通过Bladed软件仿真测试并分析不同转速禁区对机组性能影响,将所得参数用于现场实验。仿真、实验表明,所提转速禁区方案能有效避开共振区,并能保证发电量损失最小。
关键词:变速风力发电机组;速度禁区;塔架共振;两叶片
基金项目:国家自然科学基金(61203031)
收稿日期:2014-04-28修改稿收到日期:2014-08-29
中图分类号:TK83文献标志码:A
Control strategy to avoid tower resonance for two-blade variable-speed wind turbine
SONGDong-ran1,YANGJian1,DONGMi1,YANQin2,ZHANGBo2(1.School of Information Science & Engineering, Central South University, Changsha 410083, China;2.Guangdong Ming Yang Wind Power Group Co., Ltd, Zhongshan 528437, China)
Abstract:For variable-speed wind turbine (VSWT), resonance appears when the natural frequency of tower is close to the rotational frequency of rotor. In order to avoid resonance, a speed exclusion zone (SEZ) to control a wind turbine passing quickly through the zone was established. Two control strategies based on SEZ were analyzed and the suitable one for two-blade VSWT was proposed. The impacts of different SEZs on turbine performance were measured and analyzed through simulations with the Bladed software, and the parameters obtained were applied to field trials. The simulation and experimental results show that the proposed strategy can effectively avoid the arousal of tower resonance, and ensure the minimum loss of generation power.
Key words:variable speed wind turbine (VSWT); speed exclusion zone; tower resonance; two-blade
风能是发展最快的可再生能源之一。据世界风能学会统计[1],止2013年底全世界风电总装机容量达296 255 MW,仅上半年新增装机容量13 980 MW。尽管风电装机容量快速增长,但在工程、科学方面风电技术发展仍存在挑战[2]。现代风力发电机组基本为变速、柔性结构;且单机容量从上世纪的千瓦级别突破到目前3~8 MW,未来用于海上的单机容量将达10 MW。在此背景下,为最大程度获取风能、降低机组载荷,风力发电机组需拥有大范围变速运行区间。而大的速度范围可能导致机组叶轮旋转频率及其它部件如叶片、塔架、传动链的固有频率在某速度点重合,从而产生共振。
为避免引发机组共振,设计阶段通常进行机组固有特性计算、可能引起的共振及共振区域分析[3]。机组概念设计过程中除考虑叶片、塔架、传动链固有频率间保持一定距离外,应尽可能避免与外界谐振力频率重合[4]。文献[5]建议叶片固有频率与叶轮旋转频率(1 P)、叶片穿越频率(nP,n为叶片数)保持±12%范围距离;塔架固有频率、叶轮旋转频率与叶片穿越频率保持10%范围距离。实际应用中塔架共振问题尤其突出[6],会致整个机组振动,直接影响机组安全性;正常设计中塔架一阶固有频率较低,与叶轮旋转频率较接近。对三叶片风力发电机组可通过改变壁厚[7]或半径改变塔架固有频率,使固有频率位于1P~3P之间。而对两叶片风力发电机组,对塔架进行优化使固有频率低于1P或高于2P将导致塔架成本大幅上升。唯一可行方案为采取适当控制策略避免机组运行在共振转速区间。
近些年,已对风电机组共振转速区域称谓形成共识[8],称为转速禁区(Speed Exclusion Zone,SEZ)。避免风电机组长期运行在该区域为控制目标的控制策略见文献[9]。Bossanyi等[10-12]提出在共振转速前后10%范围内设SEZ,设转速在该区间内以一定斜率增加(Ramped Speed Reference,RSR); Schaak等[13]提出在SEZ范围内据叶轮转速设定发电机转矩并给定函数(Torque Demanding Function,TDF),而此函数确保SEZ为非稳定工作区;Licari等[14]对Bossanyi方法进行基于Matlab/Simulink的仿真及1.3 kW测试系统实验验证,获得指导性建议。本文以两叶片机组为研究对象,从应用角度分析研究避免塔架共振的控制策略及不同控制参数下机组性能,提出适合两叶片风电机组避免塔架共振控制方案。研究结果可为风电机组跨越共振区域的控制策略设计提供指导。
1两叶片机组塔架振动分析
为研究塔架结构动力学性能,需进行动力学分析[15]。通常动力学分析主要有系统动力特性分析(即求解结构的固有频率和振型)、系统受某方向简谐激励时动力学响应分析[16]。本文基于塔架动力特性分析讨论两叶片机组避免塔架共振的必要性。
1.1塔架固有频率及共振原理
据结构动力学原理,塔架运动方程可表述为
(1)
求解式(1),可得塔架第j阶振动频率为
(2)
风力机激振力主要来自叶片受力,见图1。叶片受推力F(t)分解到水平、垂直方向的力分别为
F1(t)=F(t)sin(Ωtt)
(3)
F2(t)=F(t)cos(Ωtt)
(4)
式中:Ωt为叶轮转速。
对风电机组而言,叶片的受力通过塔架支撑,叶片所受推力在水平方向分力作用体现为塔架在左右方向(x轴)位移,垂直方向分力作用体现为塔架前后方向(y轴)位移。考虑水平方向分力F1(t),此时塔架为受迫振动,不计阻尼的系统运动方程为
(5)
式(5)的特解为
qpi(t)=Qisin(wt)
(6)
联立式(5)、(6),得
Qi=F(t)/[K(1-(Ωt/wij)2)]
(7)
塔架受迫运动的解为
qi(t)=ci1sin(wijt)+ci2cos(wijt)+Qisin(wt)
(8)
当Ωt趋向wij时塔架振幅将趋向无穷,即共振。
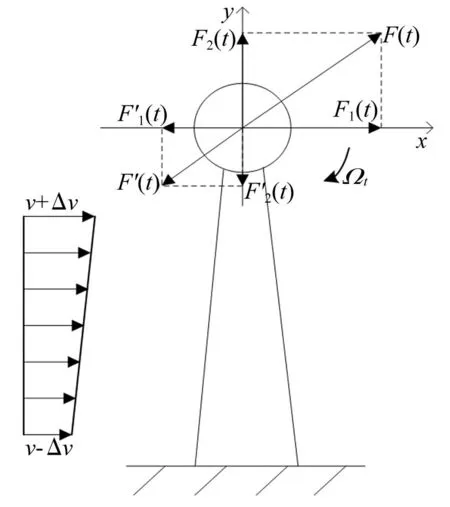
图1 叶片受力分解示意图 Fig.1 Schematic diagram of force decomposition
1.2两叶片机组塔架动力学分析
对不同叶片数风电机组,叶片所受外力合力情况不同。三叶片机组因叶片空间分布均匀,使叶轮面惯性力及气动力较均匀,动力学特性较好。而两叶片机组因叶片的空间分布使动力学问题极为突出,易产生参数激振[17]。此力学问题超出本文讨论范围,此处仅以风剪切对两叶片塔架影响为例进行分析。由图1,两叶片所受推力分别为F(t),F′(t)。据文献[17],推力FT可表述为
FT=ρACTv2
(9)
式中:ρ为空气密度;A为叶轮圆周面积;CT为推力系数;v为风速。
由赫尔曼指数公式,风速随高度变化为
v(z1)/v(z2)=(z1/z2)α
(10)
式中:v(z1),v(z2)分别为高度z1,z2处风速。一般条件下指数取0.14。
式(10)表明风速随高度增加而减小,即风剪切效应。设轮毂中心风速v,叶片1、2所处位置平均风速分别为v+Δv及v-Δv,则水平方向推力分力合成为
(11)
由式(11)知,风剪切导致两叶片机组承受水平方向2倍频的扭转力;同理,风剪切也导致两叶片机组承受垂直方向2倍频的俯仰力。而相同风剪切对三叶片作用力相互叠加,完全平衡。由此表明,同等容量下,两叶片机组塔架承受的外力激振远比三叶片机组严重。
一般性假设,两叶片机组工作转速范围为[10 r/min, 20 r/min],对应1P、2P频率范围分别为[0.167 Hz, 0.334 Hz]及[0.334 Hz, 0.668 Hz]。而柔性塔架的一阶固有频率均位于此范围。因此,避免塔架共振的控制策略对两叶片变速风力发电机组不可或缺。
2明阳风电两叶片机组
2.1机组基本信息
明阳风电两叶片机组为由德国Aerodyn公司设计的永磁同步半直驱风力发电机组,具有3 MW与6.5 MW两种型号。其中3 MW机组已投入运行,原始设计参数见表1。机组工程图见图2。机组塔架为圆筒式钢塔结构,塔架高85 m,顶部直径2865 mm,底部直径4 200 mm,总质量201.7 t。
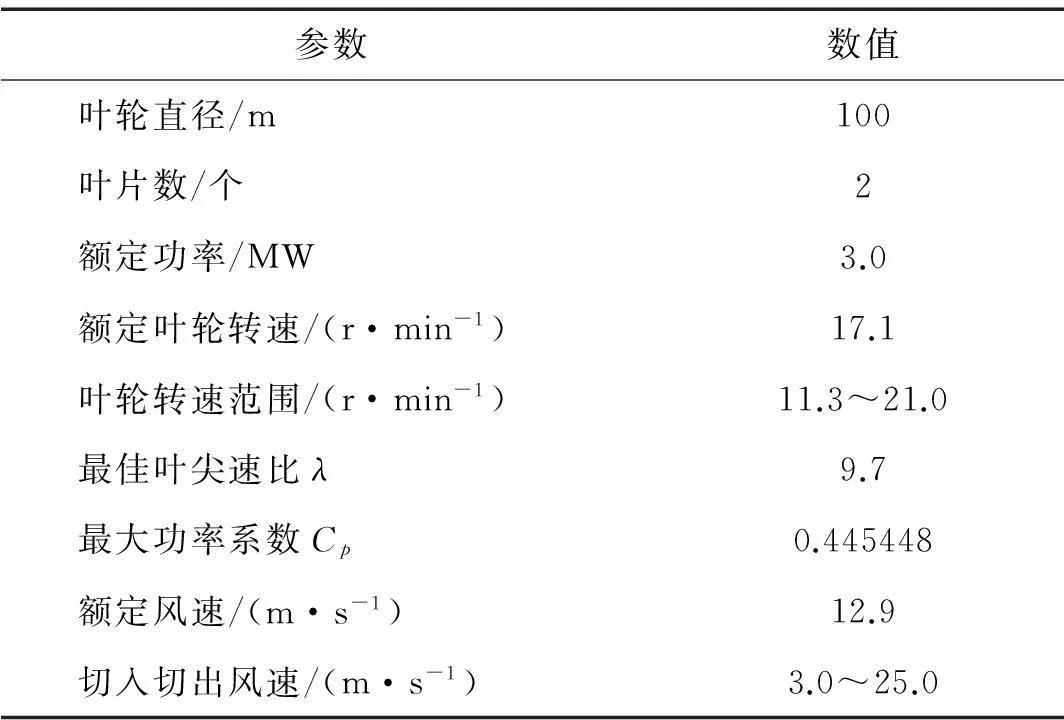
表1 机组参数
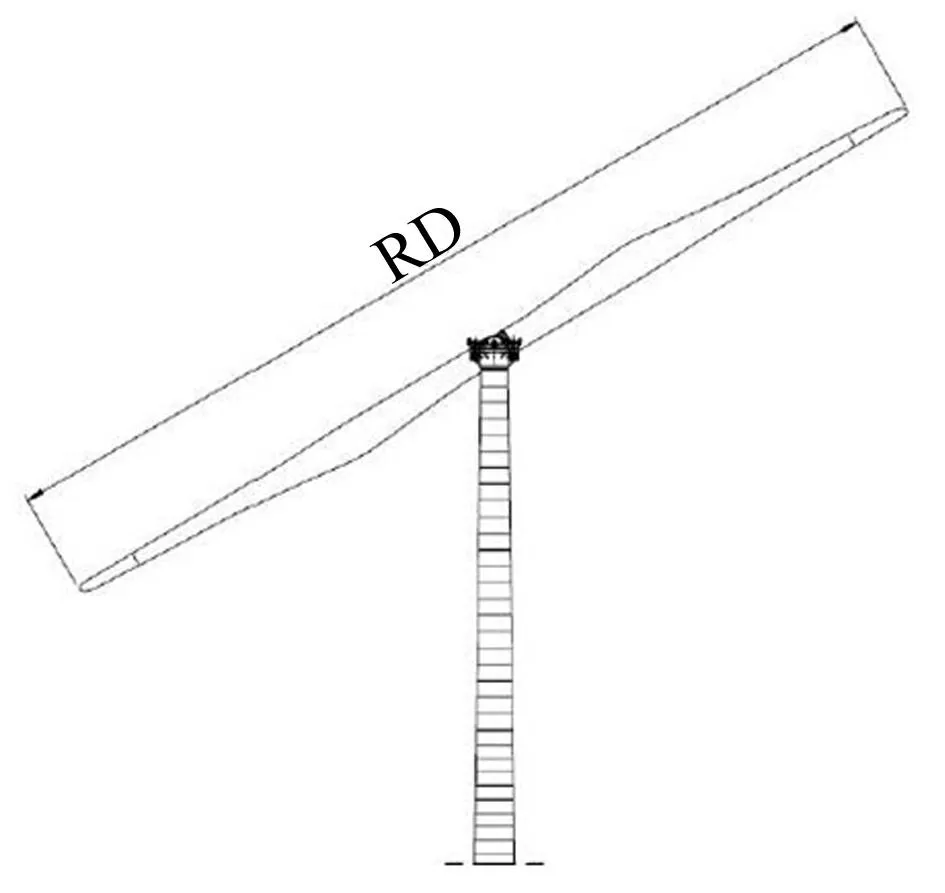
图2 两叶片机组 Fig.2 Two-blade wind turbine
2.2塔架共振问题
机组原始设计中,塔架固有频率为0.34 Hz,塔架共振将发生在10.2 r/min叶轮转速上。为避免共振,机组切入转速设计为11.3 r/min。据最佳叶尖速比计算,11.3 r/min叶轮转速对应的最佳风速为v=ΩtR/λ=11.3×3.14×50/(9.7×30)=6.1 m/s,说明在6.1 m/s之前无法实现最大风能获取。考虑机组为全功率永磁同步发电机类型,将切入转速优化为切入风速对应的6 r/min,研究控制策略解决塔架共振问题。
机组塔架经优化设计后其固有频率被改变,因此需重新计算。而塔架固有频率取决于塔架本身质量及刚度。塔架设计过程中,通常利用有限元分析软件ANSYS建立有限元模型,进行模态分析[18]。在开发避免塔架共振控制策略过程中,本文利用Bladed软件[19]生成的坎贝尔(Campbell)图确认部件模态及频率,用于控制器仿真参数设定;现场通过实测方法确认塔架实际固有频率修正塔架模型及控制器参数优化。
2.2.1坎贝尔图分析
机组坎贝尔图见图3。该图显示出2 Hz以下不同转速对应的塔架、叶片等部件模态。由图3看出,塔架一阶模态固有频率f(tower)=0.354。叶轮转速为f(tower)×60/2=10.62时,其旋转2倍频与该固有频率一致,塔架将发生共振。
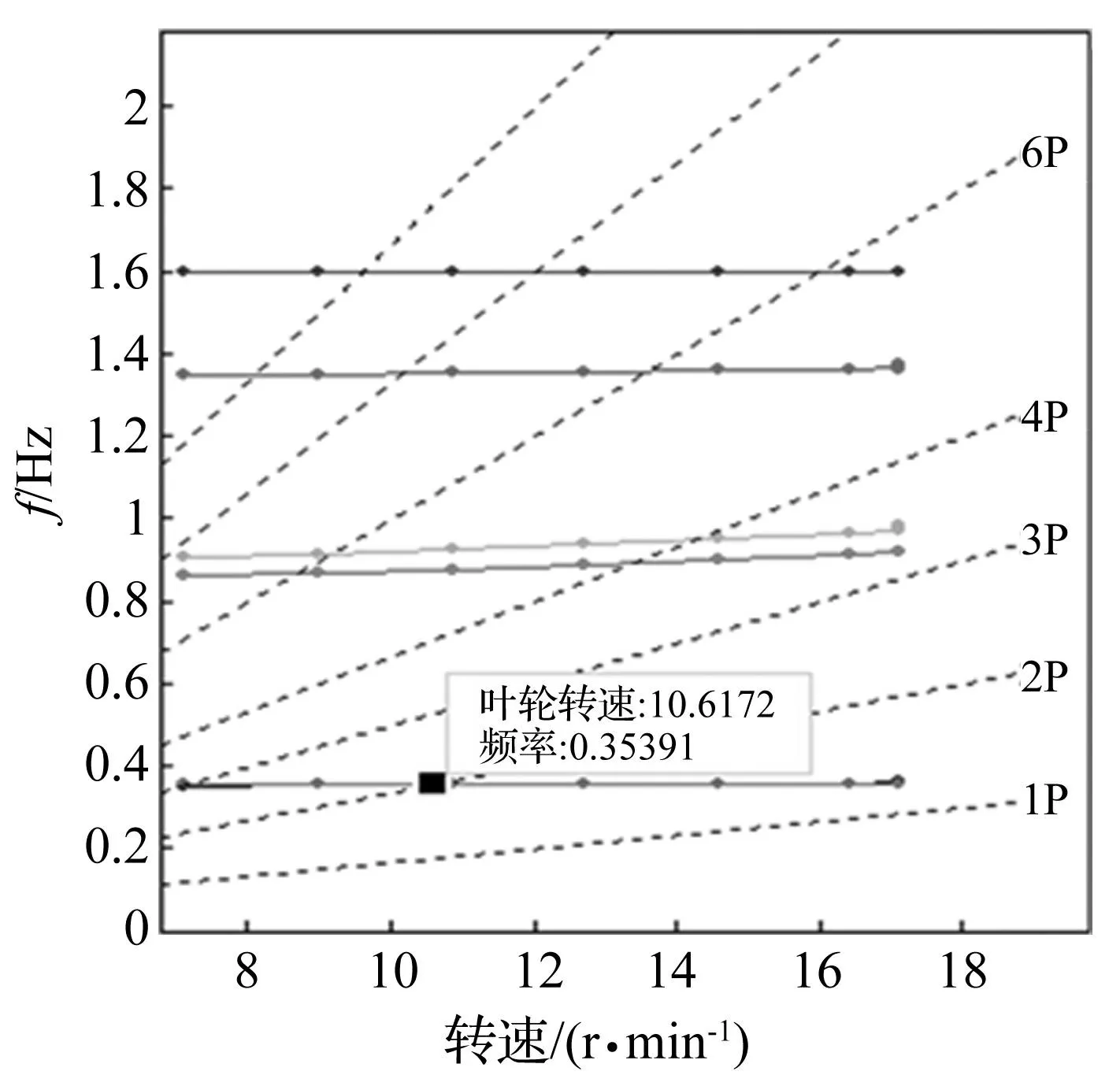
图3 机组坎贝尔图 Fig.3 Campbell diagram under study
2.2.2测试验证
风力机紧急停机、刹车或偏航时会对塔架及其它支撑结构产生冲击载荷,因此可通过控制该激励源的产生测量塔架实际固有频率。本文采用紧急停机进行测试。具体操作过程为,机组运行在正常工作情况时按钮紧急停机,记录此时塔架振动曲线,见图4。由图4知,急停后计算的塔架一阶固有频率为0.353 Hz,对应的共振转速为10.6 r/min。
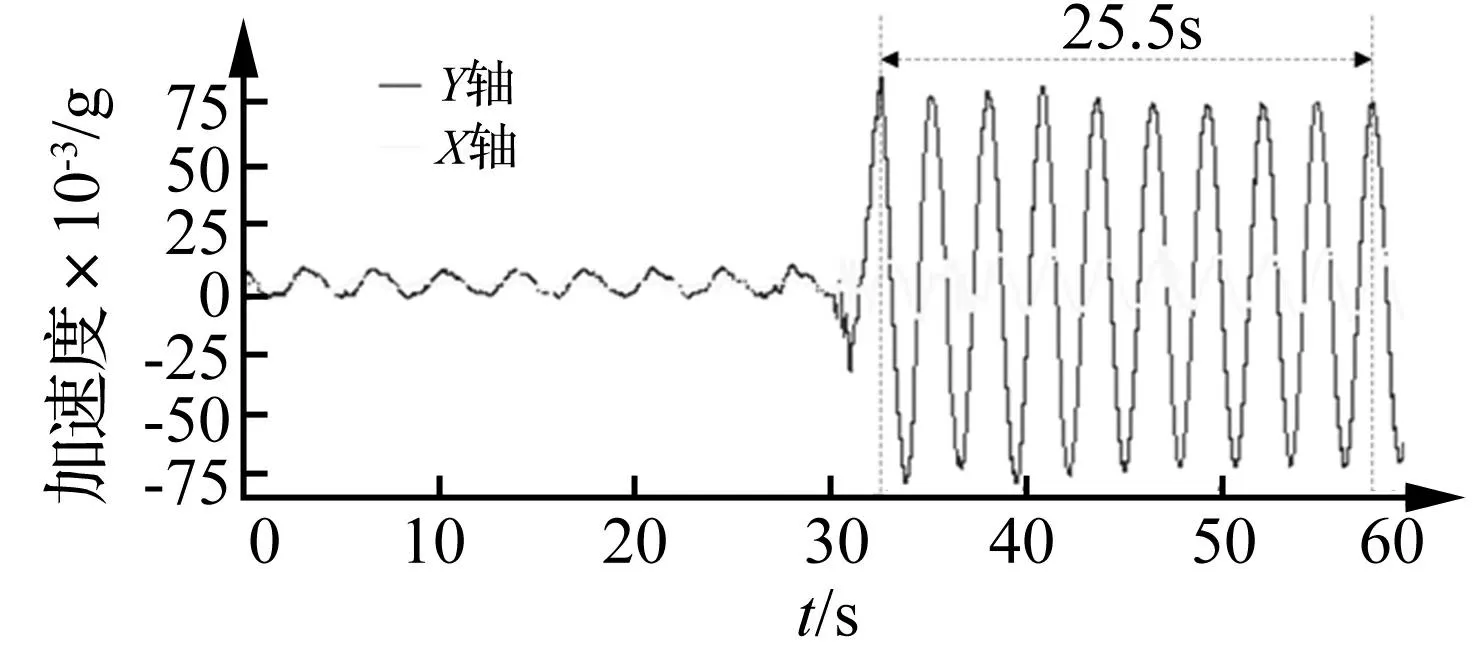
图4 急停时振动加速度-时间曲线 Fig.4 Acceleration curves under emergency stop
3基于SEZ的控制策略
该控制策略有两种,即RSR法与TDF法。本文在此基础上对其进行对比分析;对TDF法进行完善,确定两叶片机组避免塔架共振策略。
3.1RSR法
RSR法示意图见图5。机组共振转速为137.1 rad/s,C、E点对应的横坐标分别为123.4 rad/s及150.8 rad/s,二者之间即为SEZ区域。
该方法基于PI类型的转矩控制器,其数学表达式为
Tset=(kp+ki/s)(wmes-wset)
(12)

(13)
式中:wmes,wset,wrate分别为叶轮转速(或发电机转速)测量值、设定值及额定值;Tset,Trate分别为转矩设定值、额定值;wcut_in为切入转速;wc可取wcut_in与wrate均值;kλ为最优转矩系数。

图5 RSR法示意图 Fig.5 Diagram of RSR
由图5看出,引入SEZ之前机组转矩-转速运行曲线为A-B-C-F-G-H;引入SEZ后机组转矩-转速运行曲线增加了CD-FE部分。为实现此目的,对式(13)进行改造,得
(14)
3.2TDF法
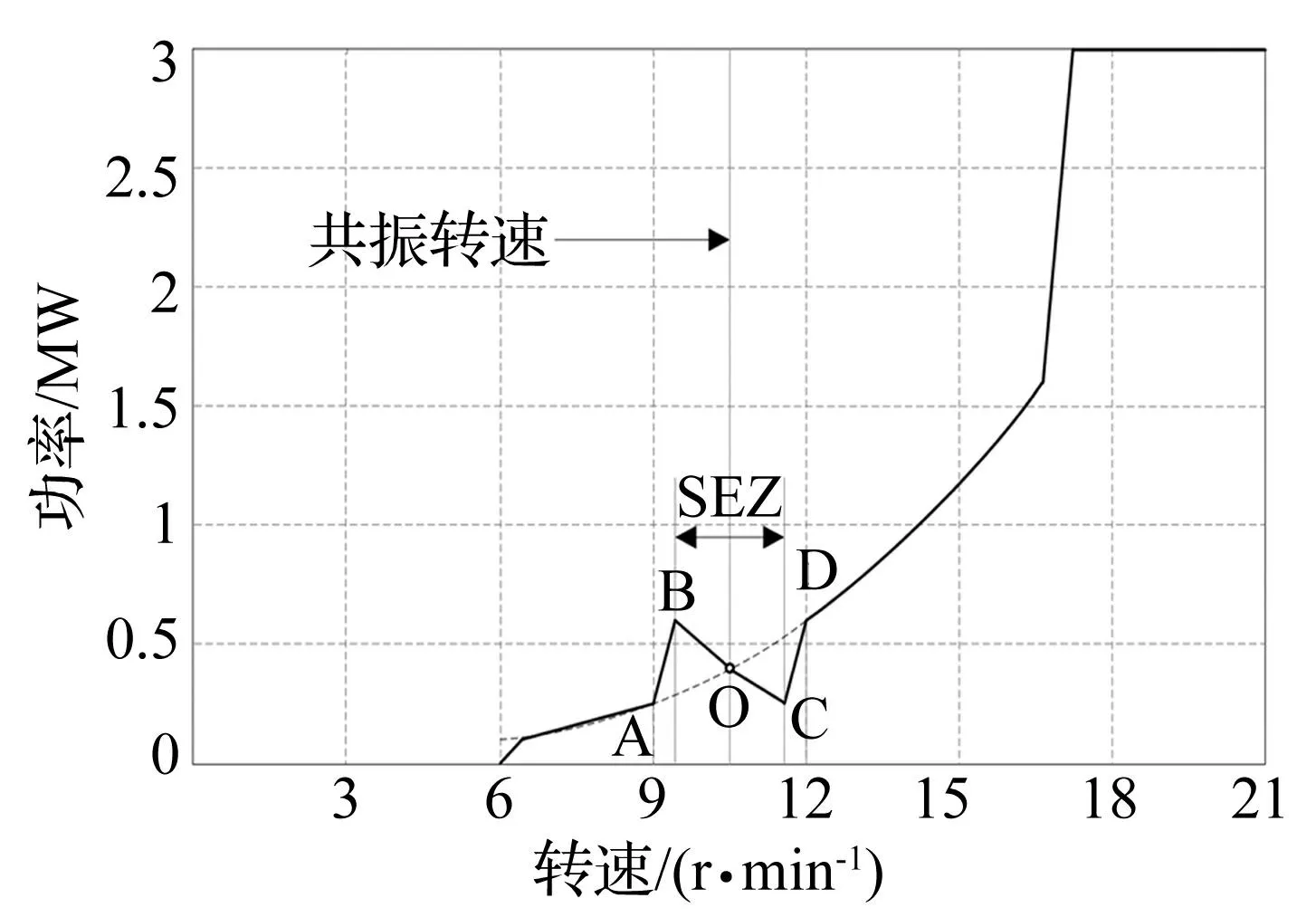
TDF法示意图见图6。该法要点为在SEZ(B-C区域)及临近区域(A-B及C-D区域)对应的转速给定设置转矩函数,利用该函数保证在SEZ内发电机负载转矩与驱动转矩间形成非正常匹配关系,从而使SEZ区域为非稳定工作区域。
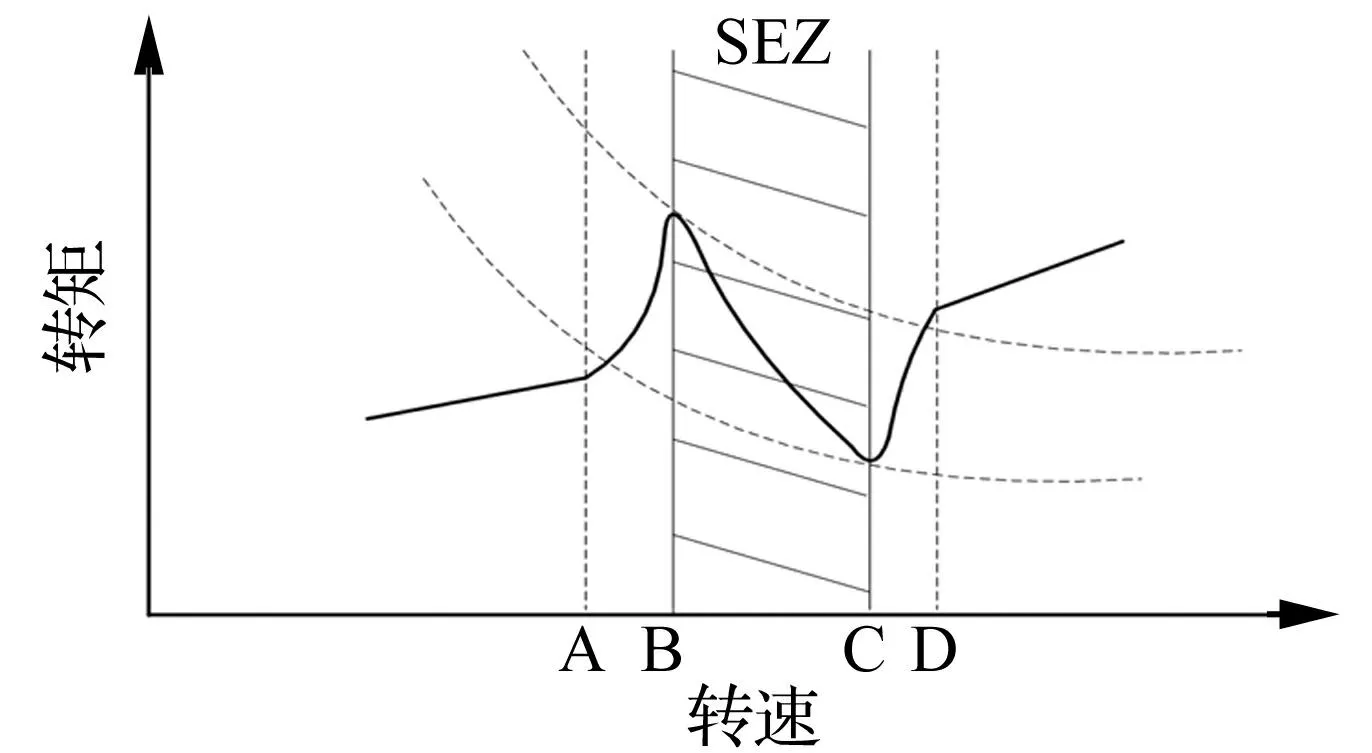
图6 TDF法示意图 Fig.6 Diagram of TDF
3.3两种方法优缺点分析
塔架共振转速一般位于额定转速以下,此时风电机组控制目标为在安全运行前提下实现最大风能获取。为此, 机组变桨系统控制桨叶维持在最佳角度,而最优叶轮转速跟踪通过控制机组发电机转矩实现。因此,对RSR法、TDF法优缺点分析仅考虑桨叶角度维持不变时风能捕获效率及跨域SEZ区域时机组塔架及传动链载荷等因素。因定量分析需涉及大量数据计算。为简便,本文仅作定性分析。
对风能捕获效率,RSR法优于TDF法。图5的RSR法仅在SEZ区域内无法实现最大风能捕获;而图6的TDF法无法实现最大风能捕区域包含SEZ及临近区域(A-B及C-D区域)。SEZ范围大小设置一致时,避免共振损失的能量RSR法小于TDF法。
对跨越SEZ区域时机组载荷,TDF法优于RSR法。基于:①跨越前工作点分析。机组在TDF法作用下运行在A-B或C-D区域,而在RSR法作用下运行在C-D或E-F区域。据共振分析,机组转速频率越远离塔架固有频率塔架振幅越小。因此,TDF法下机组运行转速对塔架影响小于RSR法。此外,考虑转矩波动对传动链影响,TDF法亦优于RSR法。②跨越过程中动态分析。设跨越前机组在TDF法下运行在A-B区域,在RSR法下运行在C-D区域;之后风速增加,机组尝试跨越SEZ,在TDF法作用下机组转矩给定随转速上升而减小;而RSR法下转矩先从Thigh减小到Tlow后随转速给定增加而从Tlow增加到Thigh。在此跨越过程中,因两种方法均用减小发电机负载转矩促使机组转速实现跨越。当跨越过程中风速突然变小,TDF法仍能保证机组跨越到C-D区域,因TDF设定B-C区域转矩-转速曲线为一条非稳定运行工作点集合;而RSR法却可能使机组运行在C-F区域。
3.4基于SEZ的两叶片机组控制策略
由以上分析知,两叶片机组塔架承受的外力激振远比三叶片机组严重,因此在控制策略中以减小机组载荷、保证机组安全运行为第一控制目标。基于上节分析,采用基于TDF方法避免塔架共振,并在监控保护设计中,增加跨越SEZ监视功能模块。
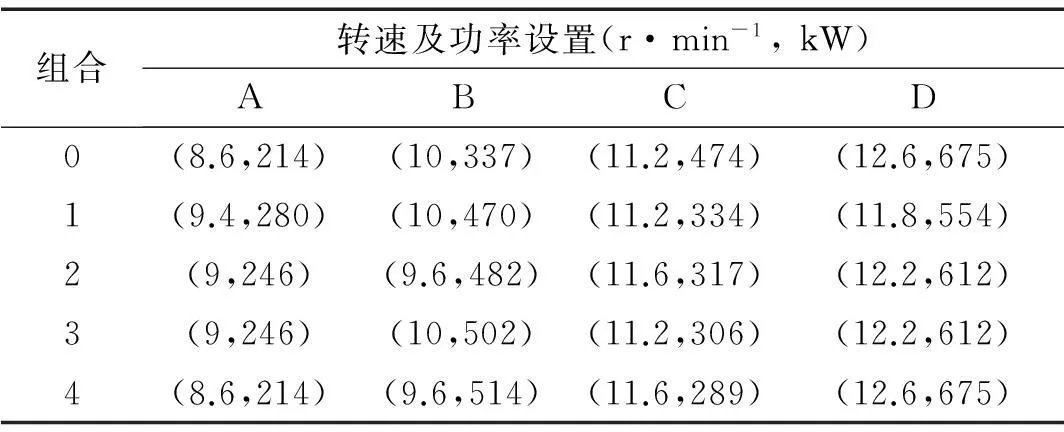
TDF法核心为建立SEZ。文献[13]仅提出关于TDF法理论,未涉及SEZ参数选择及优化。为设计合适的SEZ,需研究机组功率曲线。绘制3 MW两叶片机组功率曲线见图7。图中,SEZ涉及的参数主要含A,B,C,D四点对应的转速及功率值。为保证机组在SEZ区域及邻近区域外其它运行区间能获取最大风能,且机组不会在SEZ区域频繁过渡,四点转速及功率设置需满足
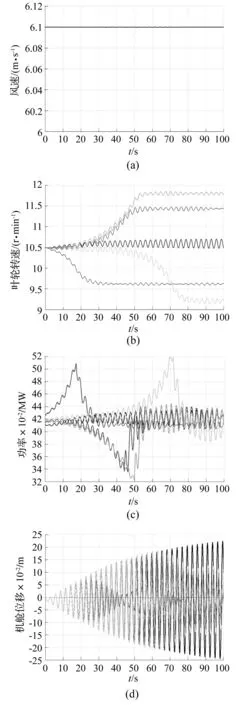
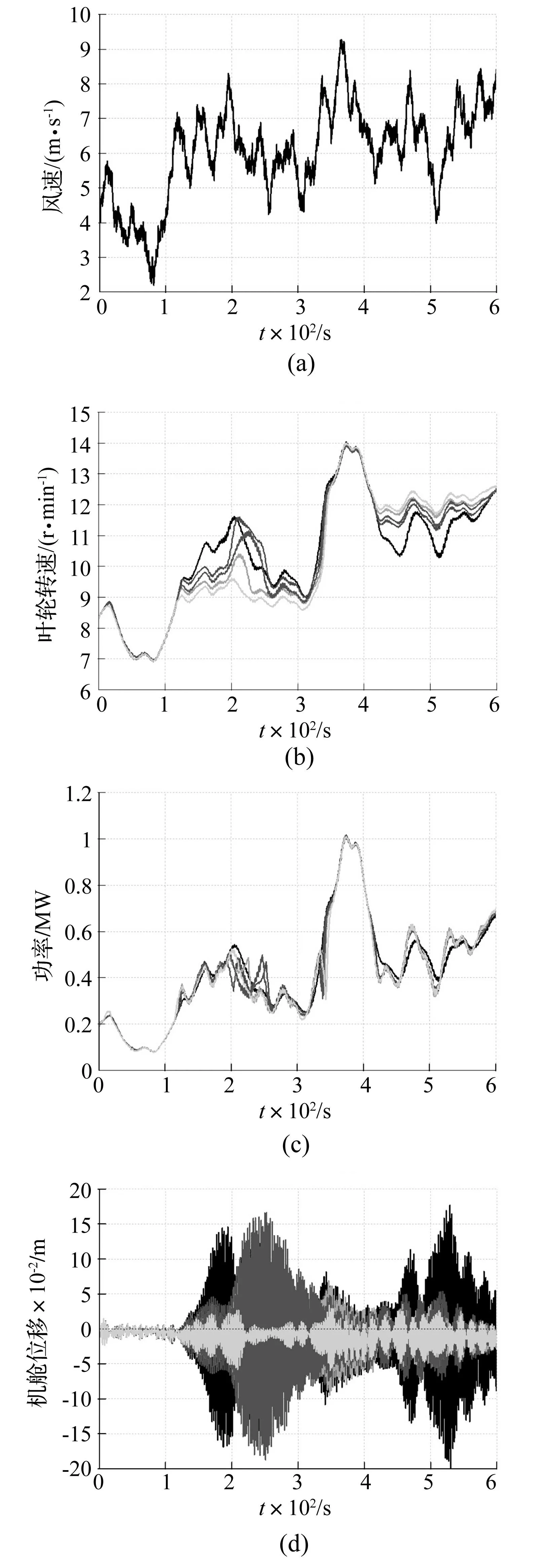
wA≤wB (15) (16) 很明显,满足式(15)、(16)的不同转速及功率取值对应不同的控制性能。对转速值选取,本文采用仿真测试方法确定。B、C点功率设定以机组安全稳定跨越SEZ为首要目标,并尽量减小SEZ导致的能量损失,分别取 (17) 考虑实际情况下机组运行风况不确定性,在监控保护程序中增加SEZ跨越监视功能模块。该模块为SR计时器,当机组进入SEZ区域(据转速判断)时开始计时;机组在SEZ区域内超过预先所设时间时,模块输出触发信号,启动机组保护程序;计时器复位由退出SEZ区域及机组保护程序启动等逻辑触发。 图7 功率曲线图 Fig.7 Diagram of power curve 4仿真及现场实验 仿真目的为测试控制策略的合理性;并对比不同SEZ转速区间的机组性能,为转速参数选取提供依据。现场测试机组控制策略及参数设置在真实环境下的有效性,并尽可能据实际风况对参数进行优化,确保机组安全可靠运行。 4.1仿真研究 仿真测试在专业软件Bladed平台下进行,从而确保仿真的可靠性。 4.1.1仿真参数选取 仿真目的为测试不同参数对机组性能影响,考虑SEZ宽度对塔架振动影响、SEZ临近区域宽度对塔架振动影响及湍流强度对塔架振动影响。对前两种情况,选±6%及±10%范围作为SEZ及临近区域宽度。为便于描述,将不同SEZ参数组合分别定义为0~4,与之相匹配的组合参数见表2。据式(21)、(22)及转速区间,SEZ涉及的A、B、C、D点转速及功率见表3。 表2 参数组合定义 表3 仿真参数设置 考虑第三种情况,据最优叶尖速比计算共振转速10.6 r/min对应的平均风速为5.7 m/s;湍流强度选择据IEC 61400-1风电机组设计标准[20]分别设置为12%,14%,16%。 4.1.2仿真结果及分析 4.1.2.1稳态风时仿真 稳态风速目的主要为确认对应共振转速的所需风速及观察所选控制参数是否能保证SEZ区域为非稳定工作区。按理论计算风速应选5.7 m/s,但实际仿真中却发现6.1 m/s风速才能使叶轮转速达到共振转速10.6 r/min。原因为模型中功率损耗及计算误差存在。鉴于此现象更符合实际应用场景,故本文设置平均风速6.1 m/s作为基准进行仿真。 稳态风时仿真结果见图8,仿真曲线按顺序依次为风速、叶轮转速、输出功率及机舱左右方向位移。图中黑色、红色、绿色、蓝色及青色曲线分别为组合0(即未设置SEZ区域)、组合1~组合4下结果(后续仿真设置与此一致)。组合0下转速及功率值分别稳定在10.6 r/min及0.42 MW左右, 但此时机舱左右位移振幅却在增大,即出现本文所需解决的共振问题。组合1、组合2下的转速值分别从10.6 r/min上升到11.4 r/min及11.8 r/min;发电机输出功率先分别从0.42 MW减小到0.34 MW及0.32 MW,再增加并分别稳定在0.43 MW、0.42 MW附近;机舱位移振幅经先增加再减小过程后趋于稳定。组合3、4下的转速值分别从10.6 r/min下降到9.6 r/min及9.2 r/min;发电机输出功率先分别从0.42 MW增加到0.5 MW及0.52 MW,再减小并分别稳定在0.41 MW及0.4 MW附近;机舱位移振幅经动态过程后趋于稳定。不同组合下的稳态功率之间差异原因为叶尖速比不同。此外,所有组合中转速、功率均存在一定波动,此为塔架振动所致影响。 图8 稳态风下仿真结果 Fig.8 Simulation results at steady wind 由分析可知,本文设计的参数组合在稳态风下均能有效避免塔架共振,但不同组合对机组功率输出及塔架载荷影响明显不同:机舱位移动态变化过程反映出塔架受力情况,稳态功率间差异显示出机组不同的风能转换效率。对此分析结合湍流风下仿真研究进行。 4.1.2.2湍流风时仿真 以6 m/s平均风速为基准,分别设定湍流强度为12%,14%,16%风况,进行5种参数组合下仿真,所得结果见图9~图11。 图9 湍流风12%强度下仿真结果 Fig.9 Simulation results at turbulent wind of 12% 图9中,机舱位移最明显为组合0的结果,其次为组合1。在200 s、480 s、530 s时刻,组合0下机舱位移振幅达到局部最大值(超过0.1 m),风速、转速均为局部最大值:风速接近 m/s,转速值分别为11.4 r/min、11.4 r/min、11.5 r/min。在215 s时刻,组合1下位移振幅达峰值(超过0.1 m),转速达局部最大值11.5 r/min。其它组合下位移振幅峰值均未超过0.1 m。 图10 湍流风14%强度下仿真结果 Fig.10 Simulation results at turbulent wind of 14% 图10中,机舱位移最明显有组合0、组合3下结果,其次为组合1、组合2。组合0的曲线特征与图9类似。在时间段210~280 s,组合3机舱位移振幅一直维持在0.1 m水平上,转速处于10~11.2 r/min范围内。在215 s时刻,组合1、2下位移振幅达到峰值(接近0.1 m),转速达局部最大值,分别为11.6 r/min及10.4 r/min。 图11 湍流风16%强度下仿真结果 Fig.11 Simulation results at turbulent wind of 16% 图11中,机舱位移最明显有组合0、2下结果,其次为组合3、1。组合0的曲线特征与图9、图11类似,但机舱位移振幅略小。在时间段220~260 s,组合2机舱位移振幅一直维持在0.1 m水平,转速处于9.6~11.2 r/min范围内。215 s时刻,组合3位移振幅达到峰值(超过0.1 m),转速达到局部最大值11.6 r/min;组合1位移振幅达峰值(接近0.1 m),转速达局部最大值11.8 r/min。 图12 现场测试结果 Fig.12 The testing results on field trial 对比分析图9~图11可知,组合0下机组有较大机率运行在共振转速区间,机舱位移最大;组合1下机舱位移振幅在三种湍流风下均接近0.1 m,即便成功跨越定义的共振区域;组合2、3分别在SEZ区域及邻近区域宽于组合1,但却分别在湍流强度16%、14%风况下未完成共振区域跨越,导致机舱位移振幅长时间大于0.1 m;组合4拥有±10%宽的SEZ区域及邻近区域,保证机组不会在共振区域频繁跨域,机舱位移在不同湍流下均未被激振。 4.2现场实验 据仿真分析,选组合4的参数为现场测试基准,所得实验结果见图12。据风速变化,将图12划分为几个时间段进行分析:①0~6 s平均风速在5 m/s左右,机组输出功率约为200 kW,塔架左右振动加速度幅值维持在较小值(接近0.005 g);②6~9 s风速突然增加到7 m/s,叶轮转速缓慢增大,机组进入SEZ临近区域,塔架振动加速度幅值增大到0.01 g;③9~12 s风速继续增大到11 m/s,叶轮转速从9.2 r/min加速上升到约15 r/min,振动加速度经历先增大再减小的动态过程,幅值在11.3 s达到最大值0.07g;④12~18 s,风速稳定在9~10 m/s之间,叶轮转速及振动加速度分别稳定在约15 r/min及0.03 g。 由以上描述明显看出,机组塔架在跨域共振区域时,其振动加速度幅值在3 s内快速增大,表明机组快速通过共振区域是保证机组安全运行的必要条件; SEZ区域设置使机组加速通过共振区域,从而减小塔架载荷。值得注意的是,现场测试过程中须充分考虑风速不确定性,测试参数需据现场风况对仿真参数作一定调整(本文现场测试参数在组合4基础上作了修正,叶轮转速9.6 r/min对应功率设为551 kW)。因现场测试时间有限,无法监测到不同风况下数据,建议选择保守参数。 5结论 通过阐述两叶片变速风力发电机组避免共振的必要性,给出仿真计算及现场测试中确定塔架固有频率方法,重点分析比较两种避免塔架共振策略优缺点,并以明阳3.0 MW两叶片机组为例重点研究避免塔架共振参数确定,结论如下: (1)对两叶片机组,其塔架所受外力激振远大于三叶片机组,控制策略设计需以减小机组载荷、保证机组安全运行为第一控制目标。建议选择TDF法作为避免塔架共振控制策略。 (2)TDF法参数选择中,±10%宽度SEZ及邻近区域可保证机组在不同湍流风下跨越共振区,可设为通用型参数用于现场测试。 (3)风资源数据掌握足够及现场测试过程中,可适当减小SEZ或邻近区域宽度;需在监控保护程序中增加SEZ跨越监视功能模块,机组长时间运行在共振转速区将导致塔架疲劳载荷增大,且易使机组振动值超限。 (4)避免塔架共振的控制策略难以兼顾机组塔架载荷及输出功率两个性能指标,欲获得固定的满足塔架载荷最小、发电量最大参数不现实,测试中须据现场实际风况对参数适当优化。 参考文献 [1]World wind energy association[R]. The World Wind Energy Association 2013 Half-year Report, Available: http://www.wwindea.org, 2013. [2]Pao L Y, Johnson K E. A tutorial on the dynamics and control of wind turbines and wind farms[C]. American Control Conference, ACC’09. IEEE, 2009: 2076-2089. [3]姚兴佳,刘颖明,刘光德,等. 大型风电机组振动分析和在线状态监测技术[J]. 沈阳工业大学学报,2008,29(6): 627-632. YAO Xing-jia, LIU Ying-ming, LIU Guang-de, et al. Vibration analysis and online condition monitoring technology for large wind turbine[J].Journal of Shenyang University of Technology,2008, 29(6): 627-632. [4]单光坤,王晓东,姚兴佳,等. 兆瓦级风力发电机组的稳定性分析[J]. 太阳能学报, 2008, 29(7):786-791. SHAN Guang-kun,WANG Xiao-dong,YAO Xing-jia, et al. Stability analysis on MW wind turbine[J]. Acta Energiae Solaris Sinica, 2008, 29(7):786-791. [5]Veritas N. Guidelines for design of wind turbines[M]. Det Norske Veritas: Wind Energy Department, Riso, National Laboratory, 2002. [6]姚兴佳,刘光德,邢作霞,等. 大型变速风力发电机组总体设计中的几个问题探讨[J]. 沈阳工业大学学报,2006, 28(2): 196-201. YAO Xing-jia,LIU Guang-de, XING Zuo-xia, et al. Discussions on general design of large scale variable speed wind turbine[J]. Journal of Shenyang University of Technology, 2006, 28(2): 196-201. [7]郑源,司佳钧,黄建军,等. 垂直轴风力机塔柱结构的分析及优化[J]. 排灌机械工程学报, 2011, 29(3): 246-250. ZHENG Yuan, SI Jia-jun, HUANG Jian-jun, et al.Dynamic analysis and optimization on tower of vertical axis wind turbine structure[J]. Journal of Drainage and Irrigation Machinery Engineering, 2011, 29(3): 246-250. [8]Fischer B, Shan M. A survey on control methods for the mitigation of tower loads[R]. IWES, 2013. [9]DiValentin E. Variable frequency modal response testing of the WTS-4[R]. Report No. HSER, 1985. [10]Bossanyi E A. The design of closed loop controllers for wind turbines[J]. WindEnergy, 2000, 3(3): 149-163. [11]Bossanyi E A. Wind turbine control for load reduction[J]. Wind Energy, 2003, 6(3): 229-244. [12]Bossanyi E A. Controller for 5 MW reference turbine[EB/OL]. Available: http://www.upwind.eu, 2011. [13]Schaak P, Corten G P, Van der Hooft E L. Crossing resonance rotor speeds of wind turbines[EB/OL]. Available: https://www.ecn.nl. Jan.1,2003. [14]Licari J, Ekanayake J B, Jenkins N. Investigation of aspeed exclusion zone to prevent tower resonance in variable-speed wind turbines[J]. IEEE Transaction on Sustainable Energy, 2013, 4(4): 977-984. [15]王永智,陶其斌. 风力机塔架的结构动力分析[J]. 太阳能学报, 1995, 16(2): 162-169. WANG Yong-zhi, TAO Qi-bin. Dynamic analysis of wind power turbine’s tower structures[J]. Acta Energiae Solaris Sinica, 1995, 16(2): 162-169. [16]张宪,何洋,钟江,等. 疲劳振动试验台的模态与谐响应分析[J]. 机械设计与制造, 2008 (4): 12-14. ZHANG Xian, HE Yang, ZHONG Jiang, et al. Modal and harmonic anal ys is of fatigue vibration test-bed[J]. Machinery Design & Manufacture, 2008 (4): 12-14. [17]廖明夫,加施,特韦勒. 风力发电技术[M]. 西北工业大学出版社, 2009. [18]马人乐,马跃强,刘慧群,等. 风电机组塔筒模态的环境脉动实测与数值模拟研究[J].振动与冲击,2011,30(5):152-155. MA Ren-le, MA Yue-qiang, LIU Hui-qun, et al. Ambient vibration test and numerical simulation for modes of wind turbine towers[J]. Journal of Vibration and Shock,2011,30(5):152-155. [19]Bossanyi E A. GH bladed user manual[Z]. Garrad Hassan and Partners Ltd, 2009. [20]IEC 61400-1 International standard (third edition), Wind turbines-Part 1: Design requirements[S].2005.