基于IEEE 802.11 p/1609的车辆防追尾碰撞终端系统设计与实现
2016-01-12徐淑雨,卢红洋,成健
基于IEEE 802.11 p/1609的车辆防追尾碰撞终端系统设计与实现*
徐淑雨1卢红洋2▲成健2
(1.交通运输部公路科学研究院北京100088;2.中国交通通信信息中心北京100011)
摘要车辆追尾碰撞是道路交通最主要的事故形态,车辆防追尾碰撞技术受到国内外学者的广泛关注。文中基于IEEE 802.11p/1609标准设计了车辆防追尾碰撞终端系统。系统由Freescale硬件平台与嵌入式 Linux 软件平台构成,采用全球定位系统技术实时获取车辆位置等信息,通过WAVE技术使车辆间形成高速双向交互式通信,实现车辆防追尾碰撞实时预警。通过系统通信性能测试和防追尾碰撞预警测试。通信性能测试结果表明,所设计终端系统能够较好实现高效、可靠通信,在静态和动态条件下,车辆采用BPSK调制方式时丢包率不高于10%,可很好的满足车辆安全可靠性需求;而防追尾碰撞预警测试结果表明,该终端系统能比较真实地反映实际的驾车情形,及时给出预警,预警准确率高达97%,具有较好的可用性。
关键词交通安全;车辆防追尾碰撞;终端系统设计;IEEE 802.11p/1609标准;车间通信;Freescale硬件平台
中图分类号:TP315文献标志码:A
收稿日期:2014-07-16修回日期:2015-05-26
作者简介:第一徐淑雨(1982-),硕士,工程师.研究方向:交通运输信息化.E-mail:sy.xu@rioh.cn
Design and Implementation of the Vehicle Rear-End Collision
Avoidance Terminal System Based on IEEE 802.11 p/1609
XU Shuyu1LU Hongyang2CHENG Jian2
(1.ResearchInstituteofHighwayMinistryofTransport,Beijing100088,China;
2.ChinaTransportTelecommunications&InformationCenter,Beijing100011,China)
Abstract:Rear-end collision is one of the main types of traffic collisions on the road. Therefore, rear-end collision avoidance technology has attracted extensive attention of numerous researchers around the world. This paper proposes a rear-end collision avoidance system based on the IEEE 802.11 p/1609 protocols. The system consists of a Freescale hardware platform and a software platform based on an embedded Linux OS. Real-time location information of each vehicle is obtained by Global Positioning System (GPS). A wireless access in vehicular environments (WAVE) is used to provide a high-speed and two-way interactive communication between vehicles for real-time rear-end collision warnings. The performance of the system is tested. Test results show that the proposed system can provide high efficient and reliable communications between vehicles. The packet loss rate is less than 10% with Binary Phase Shift Keying (BPSK) under either static or dynamic vehicle operating state. And the results show that the system developed can effectively capture the different driving behaviors and provide warnings in a real time with a high accuracy of 97%. The study results indicate that the proposed system is effective for field implementation.
Key words:traffic safety; rear-end collision avoidance; system design; IEEE 802.11 p/1609 standards; inter-vehicle communication; Freescale hardware platform
*国家863计划项目(批准号:2014AA123103)资助
▲通信作者:卢红洋(1986-),硕士,工程师.研究方向:卫星导航、主动安全. E-mail:luhongyang@cttic.cn
0引言
随着生活水平的不断提高,汽车成为人们日常出行的主要交通工具之一,我国2013年汽车保有量已达到1.37亿辆[1]。汽车给人类社会带来便利的同时也带来了诸多问题,尤其以交通安全问题最为严重,这也是困扰当今交通领域的三大难题之一。根据世界健康组织的预测,到2020年,交通事故伤害在数量上将上升65%,成为造成人类伤残的第三大因素,造成的经济损失占到全球GDP的1%~2%[2]。而在交通事故中,车辆追尾碰撞是比较常见的,是公路上最主要的事故形态。通过对交通事故的分析表明,80%以上的车祸是由于驾驶员没有及时做出反应所造成的,超过65%的车辆间相撞属于追尾碰撞[3]。
为降低追尾碰撞造成的影响,世界各国展开了对车辆追尾碰撞预警系统的研究,已经有了许多的成果,如基于环境感知的各类追尾碰撞预警系统,包括雷达系统[4]、红外系统[5]、基于环境感知与机电控制相结合的系统[6]等。同时,作为预警系统的关键技术之一,以追尾和安全距离数学模型为基础的预警算法也不断涌现,如基于安全车距[7-8]或碰撞时间[9]的预警算法等。然而通过环境感知方法所获取的车辆信息噪声较大,易受环境影响,难以有效区分干扰目标,而且无法获取车辆间相对加速度信息,使其应用受到限制。
随着车车通信(vehicle-to-vehicle,V2V)技术的不断发展,很多学者对基于GPS与V2V[10-11]的防追尾碰撞技术进行了研究。将这两者结合,可以使车辆获取较为全面、准确的信息,但其有效性在V2V通信受到干扰而被屏蔽或延时时,导致信息的不准确甚至无法获取,影响预警系统性能。近年来,基于WAVE(wireless access in vehicular environment,车载环境下无线接入)的车载无线通信系统[12-13]的核心关键技术的研究也在不断进步,促使V2V通信性能不断提高,时延、丢包率等也得到有效改善。如文献[14]提出1种分析模型通过性能参数如平均传输延迟、包传输率、包接收率,评估高速公路上车辆的安全相关服务的性能;文献[15]提出1种能够动态调整CCH和SCH间长度的可变控制信道间隔多信道接入机制,在保证重要安全信息优先传播的前提下,可显著提高SCHs的饱和吞吐量和降低服务包的传输延迟。这些研究成果也为本文的研究提供了理论基础和有力支持。笔者基于WAVE协议标准,包括IEEE 802.11p及1609 协议族,构建了车辆防追尾碰撞终端系统的硬件、软件设计及实现方案,并通过实地测试,对系统的可行性进行了评价。
1车辆防追尾碰撞终端系统设计与实现
车辆防追尾碰撞终端系统通过车载单元(on board unit,OBU)实现车与车通信。当前车辆车载单元OBU采集自身车辆 GPS 定位信息、车辆状态信息,并将这些信息由DSRC(dedicated short range communications,专用短程通信技术)模块实时地发送给周边其他车辆的车载单元OBU,同时接收来自其他车辆车载单元OBU播发的位置和状态信息。当前车辆信息处理单元将接收到的其他车辆的位置与状态信息与自身信息相比对,判断是否对当前车辆造成威胁。若有,则将危险按等级分类,给出报警信息,提醒驾驶者注意,并采取相应措施以避开危险,提高交通车辆安全性。
1.1硬件设计
由于车辆主动安全通信要求终端接入及时、信息收发实时性强等,对终端设备性能要求较高,因此,本终端设计采用一主多从的模块化系统方案,GPS数据接收与处理、DSRC数据收发、数据显示模块通过相应接口与主处理器相连,每个功能模块在主处理器协调控制下单独运行,完成数据通信与交互。这种设计模式便于模块故障排查,有利于终端稳定性的提高。为此系统选择具有功耗低、稳定性良好等特点的,符合车规级的Freescale I.MX6嵌入式开发板作为研发基础。该开发板采用ARM架构的Cortex A9处理器,主频1 GHz,512 MB DDR内存,Linux嵌入式操作系统,具有串口、USB接口、以太网接口、CAN接口、音频口、视频口、PCI口等,能够很好满足终端系统的设计需求。终端系统车载单元 OBU 硬件结构见图1。
车载单元OBU硬件结构主要包含如下模块。
1)车辆接口模块。本模块主要完成OBU内外各模块的连接,为数据可靠通信和交互提供保障。采用CAN(controller area network)总线接口与车辆连接,通过CAN总线接口采集车辆加速度、速度、刹车、转向灯等动态信息。
2)LCD显示模块。本模块通过开发板提供的VGA接口外接LCD显示屏,主要从处理器接收数据处理后的结果,处理后的结果以预警信息图片的方式提供给驾驶者,直观、简便。
3)GPS数据接收与处理模块。GPS模块选取UBLOX LEA4S模块,模块包括基带与射频模块,外置天线,接收灵敏度高,定位实时精确。GPS 模块主要完成GPS 定位信号与同步时间的提取,对GPS 信号进行解调和滤波处理,解算出 GPS 卫星的导航报文,获得车辆导航定位的位置、方向等数据。
4)DSRC数据收发模块。该模块主要完成周边车辆DSRC信息的接收和自身车辆DSRC信息的播发。本文DSRC模块选择 Unex 公司的 DCMA-86P2 模块,模块采用miniPCI接口,需要将开发板PCI接口转换为miniPCI接口。模块可工作于5.850~5.925GHz的频率范围内,支持IEEE 802.11p协议,传输速率达到13.5Mb/s,包含主控模块及射频模块。

图1 车载单元硬件结构 Fig.1 Hardware architecture of the OBU
1.2软件设计
1.2.1终端操作系统设计
在Freescale开发板嵌入式硬件设计基础上进行系统软件设计,Linux 系统提供串口、USB,PCI,CAN,LCD 等设备驱动程序,降低了系统软件开发的难度,应用层程序通过调用标准接口对设备进行操作。硬件 DSRC模块实现了物理层与部分 MAC 层协议,驱动程序需要对PCI 控制器进行设置,通过 PCI 接口配置 DSRC 模块,包括初始化、设置发送接收操作、中断处理等。上层协议由 Linux内核实现,编写IEEE 1609协议栈,实现1609.4,1609.3,1609.2等协议。同时,Linux 给应用层用户提供 Socket API接口,用户由具体应用调用接口实现相应的应用,例如,可编写车辆防碰撞应用、车辆换道警示等车辆主动安全应用。
Linux操作系统内核中已经存在的TCP/IP网络协议栈模块,以及无线网卡的驱动程序。本文通过修改Atheros ath5k驱动程序实现DCMA-86P2网卡的IEEE802.11p协议规定的逻辑功能。GPS模块则采用已有的GPS驱动程序。对以下程序模块进行单独开发:WSMP模块,实现IEEE 1609.3的路由层功能;LLC模块,整合WSMP和IPv6的数据报文;虚拟网卡层模块,实现IEEE1609.4所的多信道协调控制;管理层的WME和MLME模块,为通信双方提供了数据传输通道,并完成WAVE协议栈的参数的设置与获取等功能。
1.2.2车辆防追尾碰撞算法设计
车辆防追尾碰撞算法是在WAVE协议栈基础上开发的。防追尾系统判断流程说明如下:假设A车代表行驶在前方的车辆,B车为行驶在后方的车辆,当系统启动后A,B2车以10Hz的频率将各自车辆GPS信息通过DSRC通信模块播发。当A车采取刹车措施后,触发刹车板上的触发器,A车的车载单元将触发的刹车信息及GPS信息通过DSRC通信模块发送出去。B车在播发的同时,也接收其它车辆的信息。B车接收到A车GPS等信息后,通过车载单元的防追尾碰撞算法,对接收到的信息与自身GPS信息进行判断比较,如果达到碰撞前车的阈值上限,则触发警示程序,通过声音与图像向驾驶员提示,直到驾驶员改变驾驶策略,算法重新解算无危险后解除警示。
另外,从2车距离判断,为避免追尾碰撞事故,所探测的己车到目标车辆的距离必须大于制动后2车的距离,否则汽车将有发生追尾碰撞的危险。设RA为A车通信范围,RB为B车通信范围,DAB为A,B2车相对距离,Dsafe为A,B2车的预警安全距离。采用动力学安全距离模型计算Dsafe如下[3]。
(1)
式中:vA,vB分别为前车A、后车B的车速;t1,t2,t3分别为驾驶员的反应时间、制动协调时间、减速度增长到最大的时间;a为车辆的最大的制动减速度,且aA=aB=a;Δd为停车后2车的间距。
系统的防追尾碰撞算法具体描述见表1。

表1 车辆防追尾碰撞算法描述
2系统测试
2.1测试环境设置
测试场地选择了1段车辆少的公路,分别进行系统通信性能测试和防追尾避碰测试。其中,通信性能测试主要测试了不同调制、不同速度、不同通信距离、不同数据包长度等条件下的通信速率及丢包率;防追尾碰撞测试则通过安装防追尾终端时车辆预警情形,验证防追尾终端系统的可行性,即验证通过模型计算出的安全距离和终端系统输出的预警信息是否符合实际驾车情况。具体测试参数见表2。
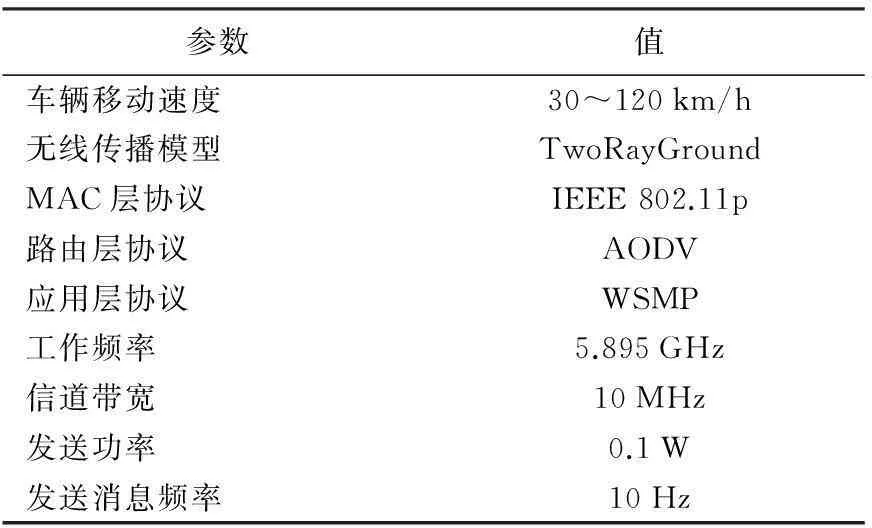
表2 测试参数设置
2.2通信性能测试
采用从OBU端在静态条件下不同距离持续发送WSMP(wave short message protocol,WAVE短信息通信协议)数据包,OBU接收后立即回应相同大小的WSMP数据包的形式,进行数据包丢包率测试。设定OBU发射功率为100mW,静态条件下的2车车间距离分别为470m和683m(即d=470m和d=683m),每次发送端OBU发送10000个数据包,数据包大小(用B表示)分别为400Bytes和100Bytes (即B=400Bytes和B=100Bytes),测得通信系统在不同的调制模式下的丢包率见图2。由图2可知,通信车辆处于静止状态,当车间距近时,BPSK调制模式未出现丢包现象,QAM16调制模式丢包率较大,而且传输的数据包越大丢包越严重;随着车间距增大,丢包现象明显加重,只有BPSK(binary phase shift keying,二进制相移键控)模式丢包率略低,在可接受范围内(丢包率不高于10%),QAM16调制模式下的数据包几乎全部丢失。可见,丢包率与编码方式和通信距离密切相关,通信距离越大,传输速率越高,丢包现象越严重,在车载通信环境下,可靠通信应优选BPSK方式。

图2 静止车辆不同调制模式下的丢包率 Fig.2 Packet error rate of motionless vehicles under different modulation modes
设定OBU发射功率为100mW,通信车辆以30km/h的平均速度同向行驶,2车车间距离维持在300m和175m左右(即d=470m和d=683m),每次发送端OBU发送5000个数据包,数据包大小分别为400Bytes和100Bytes(即B=400Bytes和B=100Bytes),测得通信系统在不同的调制模式下的丢包率见图3。由图3可知,OBU移动状态下BPSK调制模式下的通信效果最佳。运动车辆车间距相同的情况下,传输的数据包越大,丢包越严重;相同传输速率时,随着车间距的增大,丢包率上升。可见,丢包率还受车辆移动速度和和数据包大小的影响,为保证车辆间的可靠通信,可优选BPSK或QPSK(quadrature phase shift keying,正交相移键控)方式。
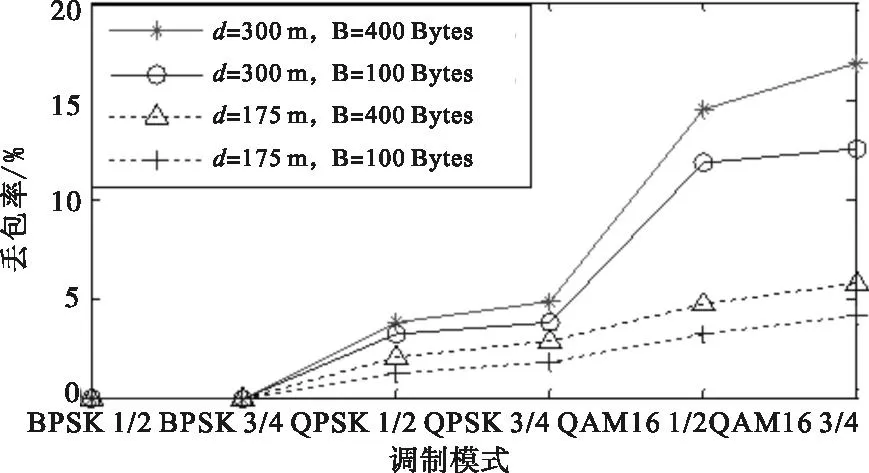
图3 运动车辆不同调制模式下的丢包率 Fig.3 Packet error rate of moving vehicles under different modulation modes
综合上述,在保证数据传输速率和可靠性情况下,车载终端通信时编码方式可选择QPSK。
2.3防追尾碰撞测试分析
所设计系统是否能在实际驾车时较好地实现防追尾碰撞的情况,需要进行实际验证和测试。笔者将终端系统直接安装在车辆上进行防追尾碰撞测试。考虑实际测试的危险性,减少测试过程中的损失,只针对同车道上前车静止和前车突然减速2种极端情况进行测试,并统计给出实验结果,见表3和表4(表中数据是若干组测试结果中选取的一部分),其中t1=1.5s,t2=0.2s,t3=0.2s,Δd=5m。由表3和表4可知,当后车获知与前车的实际间距小于预警安全距离时,系统能够正常预警。
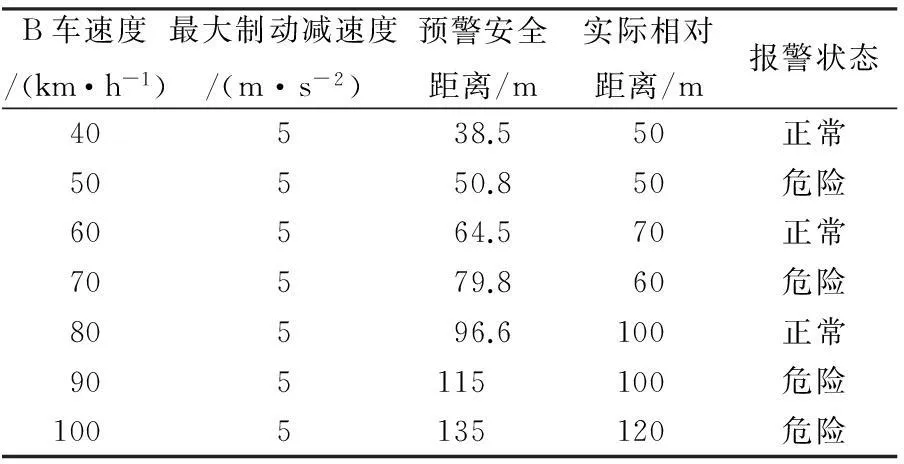
表3 前车静止时的系统验证
另外,考虑车辆行驶中受到各种因素的影响,如车辆速度、GPS定位误差、交通环境干扰等,本文采取相同参数重复测试的方法进行系统验证。在前车静止时选取B车速50km/h、最大制动减速度5m/s2进行重复测试验证,100次测试中准确率为97%;在前车突然减速时选取A车速70km/h、B车速80km/h、最大制动减速度5m/s2进行重复测试验证,100次测试中准确率为95%。可见,该终端系统的预警准确率可以满足车辆应用需求,能够较好的帮助驾驶员实现追尾避碰。
综上所述,防追尾碰撞系统能够比较真实的反应实际的驾车情形,及时给出报警,为安全驾驶提供保障。

表4 前车突然减速时的系统验证
3结束语
笔者提出了基于IEEE 802.11p/1609标准的车辆防追尾碰撞终端系统。经过实地测试,系统能够较好地实现高效、可靠通信,工作正常,可真实的反应实际的驾车情形,及时给出预警,有助于道路上车辆的安全驾驶,具有较好的实用价值。然而基于IEEE 802.11p/1609标准的车辆防追尾碰撞终端系统实现正常安全预警工作的前提是相关车辆必须安装相应终端系统或设备,所以其普及应用受到一定的限制。同时,复杂的道路交通环境、车辆位置定位精度、响应时间等也对系统预警的可靠性造成影响。因此,仍需要进一步的研究以实现系统的完善和优化,提高其预警准确率和可靠性,来满足系统的普及应用需求。
参考文献
[1] 中华人民共和国国家统计局. 中华人民共和国2013年国民经济和社会发展统计公报[EB/OL]. (2014-02-24)[2014-07-15]. http://www.gov.cn/gzdt/2014-02/24/content_2619733.htm.
NATIONAL BUREAU OF STATISTICS OF THE PEOPLE'S REPUBLIC OF CHINA. 2013 Statistical Bulletin of National Economic and Social Development of China[EB/OL]. (2014-02-24)[2014-07-15]. http://www.gov.cn/gzdt/2014-02/24/content_2619733.htm.
[2]ALEXANDER P, HALEY D, GRANT A. Cooperative intelligent transport systems: 5.9-ghz field trials[J]. In Proc. of the IEEE, 2011,99(7): 1213- 1235.
[3]武元杰. 汽车防追尾碰撞主动安全系统关键技术研究[D]. 淄博:山东理工大学, 2011.
WU Yuanjie. Research for key technology of rear-end collision active safety system[D]. Zibo: Shandong University of Technology, 2011. (in Chinese)
[4]PARK S, HWANG J P, KIM E, et al. Vehicle tracking using a microwave radar for situation awareness[J]. Control Engineering Practice, 2010, 18(4): 383-395.
[5]WENDER S, DIETMAYER K. 3D vehicle detection using a laser scanner and a video camera[J]. IET Intelligent Transport Systems, 2008, 2(2) : 105-112.
[6]尹小琴, 朱喜行, 张盼盼. 高速公路车辆防追尾碰撞系统的设计与控制研究[J]. 汽车工程, 2014(9):1080-1084.
YIN Xiaoqin, ZHU Xixing, ZHANG Panpan. A study on the design and control of vehicle rear-end collision avoidance system in freeway[J]. Automotive Engineering. 2014(9):1080-1084. (in Chinese)
[7]李智安. 一种车辆防追尾碰撞安全系统设计[J]. 上海汽车, 2009(11):38-41.
LI Zhian. A vehicle rear-end collision safety system design[J]. Shanghai Automotive, 2009(11):38-41. (in Chinese)
[8]张辉宜, 郝小林, 袁志祥等. 汽车防追尾碰撞的最小安全距离仿真研究[J]. 计算机仿真, 2014, 31(11):146-149,207.
ZHANG Huiyi, HAO Xiaolin, YUAN Zhixiang, et al. Simulation research on minimum safety distance of automobile rear-end anti collision[J]. Computer Simulation, 2014, 31(11):146-149,207. (in Chinese)
[9]陆建, 张文珺, 杨海飞等. 基于碰撞时间的追尾风险分析[J]. 交通信息与安全, 2014, 32(5):58-64,76.
LU Jian, ZHANG Wenjun, YANG Haifei, et al. Analysis of rear-end risk based on the indicator of time to collision[J]. Journal of Transport Information and Safety. 2014, 32(5):58-64, 76. (in Chinese)
[10] 宋翔, 李旭, 张为公. 高速公路汽车追尾碰撞预警关键参数估计[J]. 哈尔滨工程大学学报, 2014, (9):1142-1148.
SONG Xiang, LI Xu, ZHANG Weigong. Estimation of key parameters of highway rear-end collision warning[[J]. Journal of Harbin Engineering University, 2014, (9):1142-1148. (in Chinese)
[11]TALEB T, BENSLIMANE A, Ben L K. Toward an effective risk-conscious and collaborative vehicular collision avoidance system[J]. Vehicular Technology, IEEE Transactions on, 2010, 59(3):1474-1486.
[12]KENNEY J B. Dedicated short-range communications (dsrc) standards in the united states[J]. Proceedings of the IEEE, 2011, 99(7):1162- 1182.
[13]MORGAN Y L. Notes on DSRC & WAVE standards suite: its architecture, design, and characteristics[J]. Communications Surveys & Tutorials, IEEE, 2010, 12(4): 504-518.
[14]YIN X, MA X, TRIVEDI K S. An interacting stochastic models approach for the performance evaluation of DSRC vehicular safety communication[J]. IEEE Transactions on Computers, 2013, 62(5): 873-885.
[15]WANG Q, LENG S, FU H, et al. An IEEE 802.11p-based multichannel mac scheme with channel coordination for vehicular ad hoc networks[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2): 449-458.