四分法和差分相干结合的北斗弱信号捕获算法
2016-01-12牛家红,樊昌周,李宏伟
四分法和差分相干结合的北斗弱信号捕获算法
牛家红,樊昌周,李宏伟
(空军工程大学 信息与导航学院,陕西 西安710077)
摘要针对弱信号条件下传统卫星信号捕获算法无法满足用户需求的问题,在对接收信号进行傅里叶变换的基础上,提出了一种利用四分法估计导航数据比特跳变位和差分相干累加方法相结合的北斗弱信号捕获新算法。与基于FFT的半比特交替和相干累加结合的捕获方法比较可知,该算法数据利用率高,对噪声有良好的抑制效果。仿真结果表明,该算法可实现-38 dB信噪比条件下的北斗弱信号捕获,并可进一步提高软件接收机灵敏度。
关键词四分法;比特跳变位估计;弱信号捕获;差分相干累加
收稿日期:2015-02-04
作者简介:牛家红(1990—),女,硕士研究生。研究方向:信号处理,软件无线电。E-mail:niujiahong1@163.com。樊昌周(1977—),男,硕士,讲师。研究方向:信号处理,软件无线电。李宏伟(1966—),男,硕士,副教授。研究方向:信号处理,软件无线电。
doi:10.16180/j.cnki.issn1007-7820.2015.09.003
中图分类号TN911.7
Quartering and Differential Correlation-Combined Algorithm for BD Weak Signal Acquisition
NIU Jiahong,FAN Changzhou,LI Hongwei
(School of Information and Navigation,Air Force Engineering University,Xi’an 710077,China)
AbstractIn order to solve the inability of the traditional satellite signal acquisition algorithm to meet the practical requirements under the condition of BD weak signals,a novel algorithm based on FFT is proposed,which uses the differential coherent accumulation method and estimates the position of the navigation data bit-flip by the Quartering algorithm.With a high data utilization ratio,this method is robust to the noise as well,as compared with the algorithm with alternating half bits and combination coherent accumulating.The simulation result shows that the proposed algorithm can capture the weak signal in BDS under 38 dB SNR and can improve the software receiver sensitivity.
Keywordsquartering;bit-flip;capture the weak signal;differential coherent accumulation
针对弱卫星导航信号,文献[1]介绍了半比特交替算法和全比特算法;文献[2]介绍了相干积分、非相干积分和差分方法;文献[3]介绍了一种最大似然比特同步算法。此外还有许多基于这些基本方法的改进算法,这些算法有一个共同的特点就是通过消除导航数据位20 ms跳变对信号捕获产生的影响,延长相干累积时间,提高信噪比,从而实现弱信号的精准捕获。
论文对传统的基于FFT(傅里叶变换)的半比特交替和相干—非相干累加结合的算法进行了详细分析,探讨了传统算法对信噪比改善的局限性,提出了基于FFT的四分法和差分相干累加结合的北斗弱信号捕获算法。最终,通过仿真对比了两种算法的捕获效果,验证了新算法在信噪比改善方面具有更好的效果。
1北斗弱信号捕获算法
信号捕获的过程主要是寻找到相对于接收机的可视卫星信号,并在一定误差范围内测出该卫星信号的初始码相位和多普勒频移量。北斗信号的捕获是在FFT码并行捕获算法基础上设计的双通道并行捕获算法。该算法实际上进行了两路相关搜索,通过对单位时间单元内的信号进行两路独立的相关处理,利用双倍单位时间数据实现了信号捕获。与单通道捕获算法相比,在相同的外界条件下具有更高的检测概率[4],算法原理如图1所示。
将射频模块处理后输出的数字中频信号作为北斗软件接收机捕获模块的输入信号。北斗B1频点的导航信号采用QPSK调制方式,是由I、Q两支路上的“测距码+导航电文”调制在载波上构成的。接收机收到卫星的信号表达式如下
(1)
其中,A1、A2分别为同相和正交支路的测距码振幅;C1、C2分别为同相和正交支路测距码;D1、D2分别为同相和正交支路测距码上调制的导航电文;f0为B1频点的载波频率下变频后的中频频率;fd表示信号传输过程中产生的多普勒频移量;φ1、φ2分别为载波同相和正交支路的初相;n(t)为带限高斯白噪声。在对该算法的分析中暂不考虑多径效应以及干扰信号对捕获的影响。
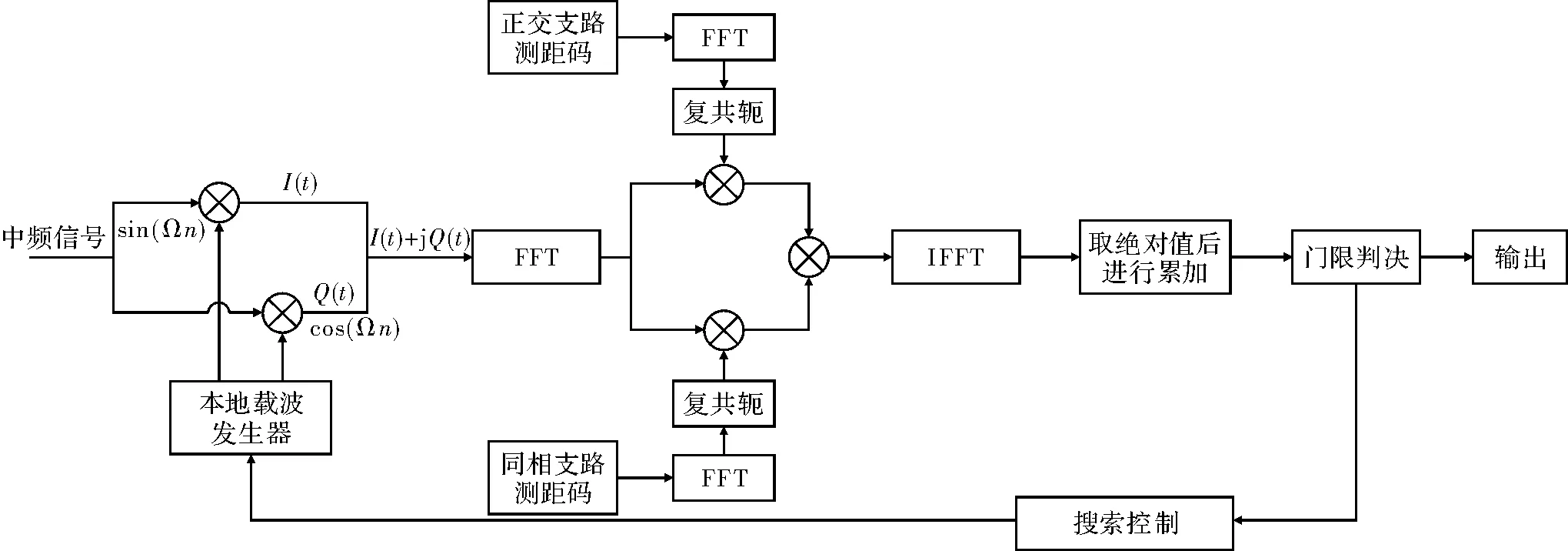
图1 基于FFT的双通道并行码相位捕获算法框图
本地载波发生器产生的I、Q两支路的本地载波分别为sin(2πf0t)和cos(2πf0t),输入信号与本地载波做相关后将载波剥离,I、Q支路分别作为复数的实部和虚部相加(I+jQ)构成一个新的信号,将其与本地伪码在频率域进行共轭相乘,再将得到的两路信号进行相加,变换回时域信号做非相干累加。通过此过程完成单频点的码并行搜索。若非相干累加的结果超过判决门限,则捕获成功;若没有超过判决门限,则通过搜索控制单元对本地载波频率进行调整,继续捕获。
传统基于FFT的北斗弱信号捕获算法主要靠延长非相干累加时间来提高检测增益,算法实现简单,运行速率较快,但由于非相干累加的过程中噪声和信号同时被平方,不但噪声自身被放大,噪声与信号的交叉乘积也会成为新的噪声,因此传统算法对信噪比的改善具有一定的局限性。
2半比特交替和相干累加结合的算法
2.1 相干—非相干累加
弱信号的捕获主要依赖两种方法:相干累加和非相干累加。对于白噪声来说,相干累加能起到累积信号能量,抑制噪声功率的作用。因此,相干累加可显著提高信噪比,从而实现弱信号的捕获。
相干累加的数学表达式为
(2)
其中,yn表示第n个累加值;L积分数据长度。
计算使用的数据长度越长,累加次数越多,获得的积分增益越高,信噪比提升越显著。对于L段1 ms的数据做相干累加的过程来说,得到的积分增益为
GC=10log(L)
(3)
非相干累加通过对相干累加输出的结果进行再一次累加,通过去除相干累加输出中未知的残留信号相位来获得信噪比额外的增益。但非相干累加中用到了平方操作,在增强信号幅度的同时,噪声的幅度也得到了增强。信噪比会受到一定程度的衰减,这一衰减量称为平方损耗。
(4)
其中,DC(1)是理想检测能力因子,其由检测概率Pd和虚警概率Pf决定,可表示为
DC(1)=[erfc-1(2Pf)-erfc-1(2Pd)]2
(5)
非相干增益与相干增益的关系如下
Gd(L)=Gc(L)-P(L)=10×log(L)-P(L)
(6)
由式(4)可知,非相干累加的损耗随着累加数目的增长而增长,相应地由式(6)可知,非相干累加的增益的增大是有限的。同时,随着非相干累积的数目增多,计算量也在增大。因此非相干累加的数目应折中考虑。
2.2 半比特交替算法
在北斗的导航信号中,数据位的速率是50 bit·s-1,即导航数据位的周期是20 ms,这就导致了导航数据每20 ms可能会产生一次比特跳变,相干累加的长度受到了限制。在没有任何外部辅助信息的条件下,比特跳变的位置也是未知的。因此,通常可选的相干累加长度最大为10 ms[5]。
当连续选取20 ms的导航数据时,导航数据的比特跳变位必存在于其中10 ms的数据中,这就是半比特交替算法的基本思想。选取长度为n×20 ms,(n=1,2,3,…)的导航数据,以10 ms作为一个基准单元进行分块,如图2所示。

图2 半比特交替算法分块图
对每个块内的10 ms数据进行相干累加,生成2n个1 ms的数据,并将结果分别记为yn(n=1,2,3,…),将yn按照n的奇偶性分成两组,分别对奇数组和偶数组进行非相干累加
(7)
由于在20 ms的导航数据中只存在一次比特跳变,故该跳变位必然出现在两组累加结果中的一组。比较两组的累加结果,数值较大的一个即为不含比特跳变位的导航数据,再将该组数据送入门限进行捕获判决。
基于FFT的半比特交替算法实现简单,但数据利用率只有50%。该算法中使用了相干—非相干累加结合的方法处理数据,在累加过程中噪声功率被放大,存在严重的平方损耗,对噪声的抑制效果有限,处理北斗弱信号的效果并不理想[6-8]。
3四分法和差分相干结合的算法
3.1 差分相干累加
差分相干累加方法的提出是为了解决非相干累加带来的平方损耗问题。和非相干累加相比,差分相干将平方操作改为将相邻的相干累加结果进行复数共轭
相乘。差分相干累加方法利用了前后不同时段导航数据中噪声的独立性,以及导航数据受差分相干累加影响较小的特性,此时产生的损耗比平方损耗小。
差分相干累加的公式如下

(8)
式(8)中,Z(k+1)和Z(k)是相邻数据的相关输出,通过两者的共轭相乘之后取模累加,增强了信号的功率。由于噪声是独立的,差分相干累加是对时间上前后相连的噪声进行相乘后对噪声的放大效果较小,所以差分相干累加所带来的损耗小于非相干累加的平方损耗,提高了信噪比。
3.2 四分法估计导航数据的比特跳变位
在连续20 ms的导航数据位之内,必存在比特跳变位。当某一部分数据包含比特跳变位时,其的差分累加和小于其他数据的差分累加和。将20 ms的数据进行分块时,每一块包含的数据量越小,包含比特跳变位的数据块和其他数据块间的差异越小,受噪声影响易造成误判;每一块包含的数据量越大,找到比特跳变位后,可利用的数据利用率将降低。折中考虑后,本文采用四分法将20 ms的导航数据位进行分块,这就是四分法的基本思想,和半比特交替算法相比,该方法的数据利用率达到了75%。
选取长度为n×20 ms(n=1,2,3,…)的导航数据,以长度为20 ms的数据为一个单元将导航数据划分为n个单元,并将数据单元标记为A1、A2、A3、…、An。然后将每个长为20 ms数据单元平均分成4个数据块,每块的数据长度为5 ms,并将数据块进行标记。数据单元A1平均分成4块分别为A11、A12、A13、A14,其他数据单元也照此进行分块标记,处理过程如图3所示。
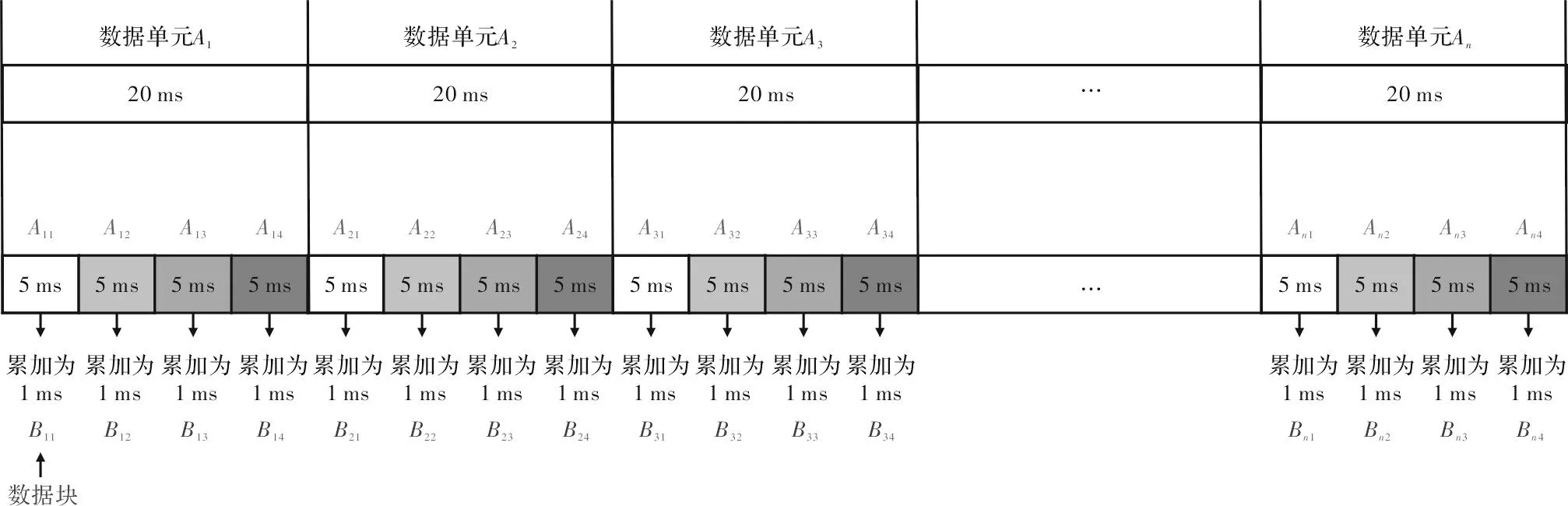
图3 导航数据处理图
四分法算法步骤如下:
步骤1按照图3所述方式对数据进行划分,首先将数据以20 ms为一个单元划为n个单元,然后将每个单元以5 ms为一个块划为4块,并按图标记数据块。
步骤2分别对A11、A12、A13、A14、A21、A22、…、An1、An2、An3、An4内的5 ms数据块进行相干累加,累加后每个数据块长度为1 ms,并将累加后的数据块标记为B11、B12、B13、B14、B21、B22、…、Bn1、Bn2、Bn3、Bn4。
步骤3对累加后的数据块进行差分相干累加。将每个数据单元的对应数据块按照式(9)进行差分相干累加得到(C1、C2、C3、C4)。
步骤4对比4个差分相干累加结果(C1、C2、C3、C4),存在比特跳变位的那组数据块累加值最小,由此可判别出跳变位所在数据块。
步骤5如图4所示,截取第一个跳变位数据块之后的数据,并将跳变位所在数据块抽取掉,对其余数据块进行重排。
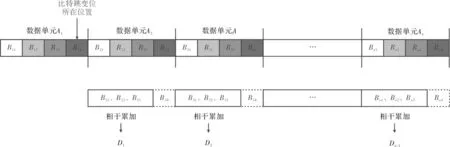
图4 四分法数据处理示意图
步骤6对步骤5得到的数据进行相干累加,得到D1、D2、…、Dn-1,再将累加结果按照式(10)进行差分相干运算。
步骤7将步骤6得到的差分结果E送入判决器进行门限判决:若大于门限值,则捕获成功;若小于门限值,则重新进行捕获运算
(9)
(10)
4仿真结果及分析
本文仿真数据是根据实际的北斗B1频段C/A码的信号特性和中频信号的参数,用Matlab仿真生成。使用仿真信号便于设置输入信号的多普勒频移量、码相位偏移量和信噪比,便于算法的验证,同时可避免其他非相关因素对捕获结果的影响。相关参数设置为:中频频率为6.096 MHz,信号速率为50 bit·s-1。在不同信噪比下,用半比特非相干累加算法和四分法差分相干累加算法进行捕获实验。
从图5可看出,在信噪比为-30 dB的环境下,两种方法均可成功捕获到北斗信号。本文提出的基于FFT的四分法和差分相干累加结合的信号捕获方法有更好的捕获效果,尖峰更为突出,对噪声抑制更为明显。
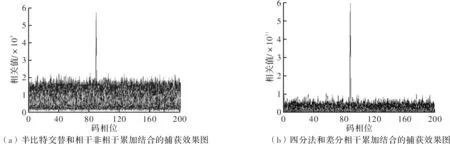
图5 两种方法在信噪比为-30 dB环境下的捕获效果图
图6为两种捕获方法在信噪比为-35 dB环境下的捕获效果图。可看出半比特交替算法捕获效果已不明显,噪声对捕获尖峰干扰比较大,虚警概率会因此增大。而四分法和差分相干累加结合的捕获算法仍然对噪声有较好的抑制效果,捕获效果明显。
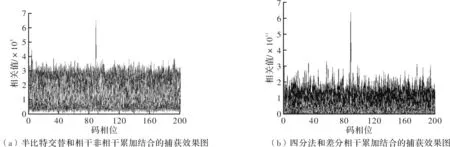
图6 两种方法在信噪比为-35 dB环境下的捕获效果图
图7为两种捕获方法在信噪比为-38 dB环境下的捕获效果图。可看出半比特交替算法虽然捕获到了卫星信号,但噪声干扰已过大,虚警概率较高。四分法和差分相干累加结合的捕获算法仍对噪声有抑制,但由于受到噪声的影响增大,需经过多次捕获操作才能捕获信号。
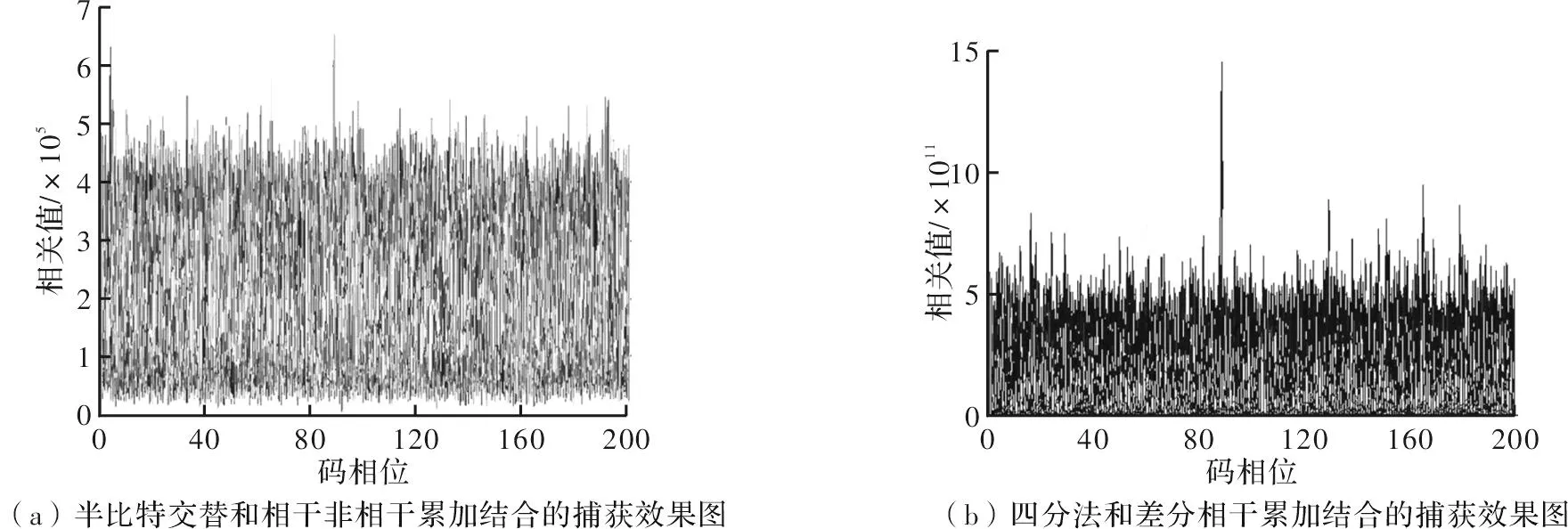
图7 两种方法在信噪比为-38 dB环境下的捕获效果图
5结束语
本文在北斗软件接收机的捕获算法方面提出了一种基于FFT的四分法和差分相干累加结合的弱北斗信号捕获算法。该算法采用四分法对导航数据的比特跳变位进行估计,然后对中频信号进行读取累加,最后用差分相干累加的方法减小平方损耗提高信噪比。实验结果表明,相对于基于FFT的半比特和相干—非相干累加结合的弱信号捕获算法具有更好的捕获效果。本文提出的新算法能准确捕获到信噪比为-38 dB的弱信号并正确估计出码相位和频率的偏移量。
参考文献
[1]陈庆.微弱GPS/北斗基带信号捕获研究与实现[D].广州:暨南大学,2013.
[2]璩莹莹.“北斗二代”B1频段弱信号捕获技术研究与实现[D].西安:西安电子科技大学,2014.
[3]康博超.弱信号环境下北斗二代信号捕获方法研究[D].西安:西安电子科技大学,2014.
[4]黄隽祎.北斗B1 QPSK中频信号优化捕获与跟踪技术研究[D].南京:南京航空航天大学,2013.
[5]O′Driscoll C,Petovello M G,Lachapelle G.Software receiver strategies for the acquisition and re-acquisition of weak GPS signals[C].Journal of Guidance,Proceedings of the Institute of Navigation,National Technical Meeting,2008:843-854.
[6]Manandhar D,Suh Y,Shibasaki R.GPS signal acquisition and tracking-an approach towards development of software-based GPS receiver[C].Beijing:Technical Report of IEICE,2004.
[7]李寅寅,徐晓苏,刘锡祥.基于半比特交替和FFT组合的GPS软件接收机弱信号捕获算法[J].中国惯性技术学报,2012,20(1):46-50.
[8]吴皓威,刘远,杨力生,等.基于差分判决的GPS弱信号长比特相干捕获算法[J].华中科技大学学报:自然科学版,2013,41(7):42-46.

