南海张力腿平台在位总体性能数值计算分析
2016-01-10张法富高静坤杨小龙蔡元浪
张法富,高静坤,杨小龙,蔡元浪
(1.海洋石油工程股份有限公司,天津 300451;2.中海石油深海开发有限公司,广东 深圳 518067)
南海张力腿平台在位总体性能数值计算分析
张法富1,高静坤2,杨小龙1,蔡元浪1
(1.海洋石油工程股份有限公司,天津 300451;2.中海石油深海开发有限公司,广东 深圳 518067)
系统阐述了张力腿平台(TLP)在位总体性能分析的设计工况分类原则及数值计算流程,简要介绍了频域及时域分析方法。结合南海TLP前端设计,重点介绍了TLP数值建模遵循的原则以及平台质量特性、张力筋腱和立管的刚度及外部阻尼的计算方法。最后通过实例计算给出南海环境条件下TLP在位总体性能计算结果。所用流程及方法可供南海深水浮式平台设计参考。
张力腿平台;在位总体性能;南海;数值计算;前端设计
0 引 言
随着南海油气勘探的发现及我国深水油气开采技术能力的提升,南海深水油气资源的开采已具备条件。与其他深水浮式平台相比,张力腿平台(TLP)适用作业水深300~1 500 m,具有耐波性能良好、可使用干式采油以及技术成熟、有良好的安全记录等优点,虽然起步较晚,但发展迅速,已成为海上深水油气田开发的重要装备之一。目前全球在役的TLP平台已有29座,按结构形式可分为传统式、SeaStar系列、MOSES系列以及延伸式4种形式[1]。
TLP各阶段设计采用循环设计理念[2],TLP主尺度设计是渐次递进、逐步优化的过程。我国南海环境条件恶劣,近年来超强台风等极具破坏力的极端海况频繁出现,对平台安全性提出了严峻挑战。TLP平台总体性能分析为平台设计提供计算依据,并为船体结构、上部组块、张力筋腱、张力腿基础及立管等设计提供输入数据。本文主要对TLP在位总体性能工况定义、分析流程、涉及理论及数值建模方法进行了较为深入的研究,通过实例计算给出在位总体性能运动RAO及时域分析结果,相关方法可作为TLP在位总体性能分析的基础或参考。
1 在位总体性能分析流程
TLP总体性能分析可分为服役前和在位两个阶段。服役前指平台坞内建造至海上安装的过程,在位阶段主要指平台在位条件下可能经历的各种工况。本文对TLP在位总体性能分析进行探讨。根据南海环境条件,TLP的设计工况可以分为以下几类:设计操作条件,一年一遇台风;设计极端条件,百年一遇台风;设计生存条件,千年一遇台风;钻井作业条件,十年一遇非台风。
设计工况的定义需考虑安全等级进行分类,安全等级A,B和S的定义同美国石油学会(API)规范[2],A代表操作条件,B代表极端条件,S代表生存条件。TLP在位总体性能分析工况分类如表1所示。

表1 在位总体性能分析工况分类
表1中完整工况及舱室破损工况与一般定义相同,张力筋腱进水工况主要评估某一根张力筋腱进水后平台的性能,进水原因包括碰撞,渗水等;张力筋腱移除工况为假定进行张力筋腱移除作业后,在张力筋腱尚未回接就位前,平台遭遇风暴,此时需要对平台在恶劣海况下的总体性能进行评估。在总体性能分析中,每一个作业工况都对应一个数值分析模型,模型中的重心位置、质量分布等需要考虑到作业类型、压载方案的影响。另外,环境条件中还应包括潮位影响,以期得到平台在最恶劣条件下的表现。
对于不同的设计阶段以及不同的平台结构形式和功能要求,设计工况存在很大差异。设计工况制定完成后,需要利用软件工具对每个工况进行数值分析。通过软件计算得到TLP平台在所有设计工况的运动响应及张力筋腱/立管拉力响应、气隙值和上部组块加速度、船体及甲板结构设计所需的水动力载荷等。TLP在位总体性能数值分析流程如图1所示。
2 分析方法
目前商用软件对浮体总体响应的分析方法主要基于频域分析与时域分析[3-4]。本文对三维势流理论及速度势求解、边界条件等经典水动力学理论[5-7]不再展开讨论,主要探讨频域及时域分析方法计算TLP在位总体性能时应考虑的问题。
2.1 频域分析法
频域分析法通过谐波分析或者拉普拉斯和傅立叶变换得到平台运动方程的解。浮体频域运动方程为
[-ω2(M+A(ω)+iω(B(ω)+Bv+Be)+C+Ce]X(ω,β)=F(ω,β),
(1)
式中:ω为波浪频率;β为相位角;X(ω,β)为位移;M为质量矩阵;A(ω)为与频率相关的附加质量矩阵;B(ω)为与频率相关的势流阻尼矩阵;Bv为线性化的黏性阻尼矩阵;Be为外部连续阻尼矩阵,例如来自系泊系统的阻尼矩阵;C为静水回复刚度矩阵;Ce为外部连续刚度矩阵,例如来自张力腿的线性变化刚度;F(ω,β)为波浪激励力[8-9]。
频域分析法是用于TLP在位性能评估的首要方法,包括评估总体运动、加速度和上部组块/船体/甲板设计以及立管和张力腿系统设计需要的水动力载荷。对于船体结构设计,作用于船体水下部分水动压力/载荷以及船体附近局部节点处的水质点运动也需要通过频域分析获得。一般来说,时域分析需要用到频域分析的计算结果。
2.2 时域分析法
时域分析是对运动方程直接时间积分,能够包含波浪和运动变量的非线性因素。浮体时域运动方程为

(2)
式中:[aij]为浮体的惯性质量阵;[mij(t)]为浮体的附加质量阵;[Kij(t)]为迟滞函数阵;[Cij]为静水回复力阵;[Fi(t)]为波浪激励力阵;[xi(t)]为浮体位移阵[5]。
式(2)中方程可以加入非线性回复力,非线性阻尼力以及系泊力的影响。TLP时域耦合分析同时对船体运行响应及张力腿/立管动态响应进行求解,作用于张力腿和立管的动态拖曳力和惯性效应可以模拟为由环境载荷引起的总体响应之一部分。非线性耦合分析要考虑TLP一些非线性连接部件,例如非线性液压张紧器、张力腿断裂瞬态效应等。TLP时域分析流程如下:
(1) 确定环境条件,如风速、流速、有义波高和周期、方向及风暴持续时间;
(2) 确定TLP的风流力系数和TLP水动力模型;
(3) 确定张力腿和系泊布置、质量特性和预张力;
(4) 准备时域分析输入文件;
(5) 输出文件进行后处理;
(6) 运用修正因子对运动、加速度、气隙和张力腿张力等进行修正。

表2 典型南海环境条件
3 实例计算
海洋石油工程股份有限公司对TLP的研究[10-11]已经有十余年的技术积累。在此基础上,本文依托工信部科研课题,以南海某油田TLP前端设计为例,采用数值计算方法,对TLP在位总体性能进行实例计算。
3.1 环境条件
典型南海环境条件如表2所示,表中各工况对应的环境重现期与表1中相同。从表2可以看出南海环境条件非常恶劣,对TLP设计构成严峻的挑战。
3.2 TLP主尺度
南海某油田前端设计提出TLP+浮式生产储卸装置(FPSO)方案,油田水深404 m,TLP采用传统结构形式,TLP主尺度如表3所示。
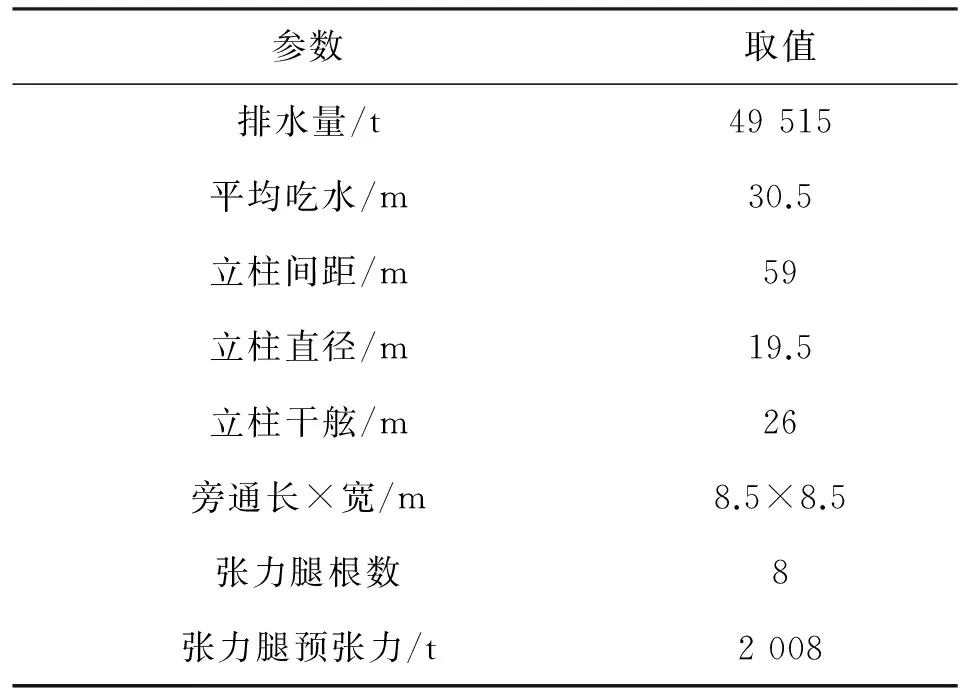
表3 TLP主尺度
3.3计算模型
3.3.1船体湿表面模型建模原则
TLP船体部分几何模型(水下湿表面模型)用于进行水动力分析。对于有限元建模,需遵循以下原则:(1)网格对角线长度需小于最小波长的1/7;(2)几何形状突变区域(边缘、拐角)网格需精细划分;(3)水线附近网格需精细划分,以确保计算波浪漂移力及短周期波浪的精确度。
除以上原则外,搭建一系列网格尺寸逐步缩小的模型,对每个模型进行快速水动力分析,直到对比结果收敛,也是确定水动力分析模型的重要手段。
3.3.2质量特性
TLP质量特性的准确性关系到静态平衡位置和动态运动计算结果。船体和上部组块重量在每个操作工况是不同的,所以需要建立对应于不同工况的质量矩阵。在频域水动力分析中,张力腿和立管的有效质量需要考虑,本文取张力腿和立管干重的1/3为垂向有效质量和水平有效质量。TLP平台质量矩阵计算公式为
(3)
式中:m为结构质量;xcg,ycg和zcg为重心坐标;Iij为惯性矩,rij为相对于坐标i和j的惯性半径。
在时域耦合分析中,张力腿和立管需要建立详细的有限元模型,其质量影响软件会自动考虑。
3.3.3张力腿和立管刚度计算
频域分析时,张力腿和立管刚度对船体结构的影响不可忽略。对于张力腿和立管,刚度计算公式如下:
K=TTKcT+
(4)
(5)
式中:EA,T,L,(cosα,cosβ,cosγ)分别为张力腿或立管的轴向刚度、预张力、长度和方向余弦;(xp,yp,zp)和(Fx,Fy,Fz)分别表示导缆孔坐标和管线预张力;从船体管线连接点到随体坐标系原点的刚度转移矩阵为
(6)
时域分析中,软件会根据有限元模型自动计算张力腿和立管刚度。同时,顶部张紧式立管的张紧器刚度在频域分析和时域分析中都需要考虑。
3.3.4TLP外部阻尼
除波浪辐射阻尼外,还需要考虑用于总体性能分析的外部阻尼。频域分析时,基于工程项目经验或者模型试验数据,每个自由度的临界阻尼可用于计算外部阻尼。阻尼矩阵通过TLP的质量矩阵、静水刚度矩阵和附加刚度矩阵运用假定的阻尼比率进行计算。
在时域分析中,非线性阻尼主要源于TLP船体念性阻尼、TLP船体气动阻尼以及张力腿和立管阻尼。
综合考虑以上因素建立船体湿表面模型及时域耦合模型,如图2、图3所示。利用势流软件SesamWadam,采用二阶非线性方法,对平台进行水动力分析,利用SesamDeepC对平台进行时域分析。

图2 湿表面模型Fig.2 Wet surface model
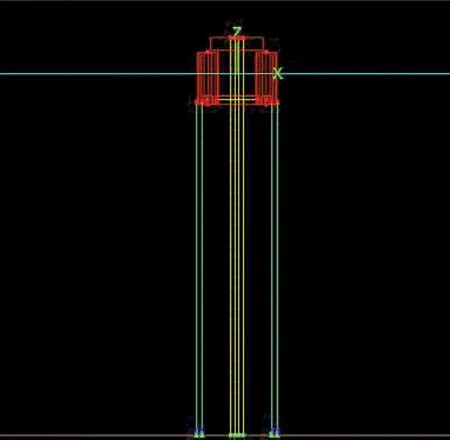
图3 时域耦合分析模型Fig.3 Time domain coupled model
3.4 计算结果
根据图1计算流程,在位总体性能分析结果涉及运动、加速度、张力筋腱拉力及转角、气隙等,这体现了TLP设计的复杂性。TLP运动RAO如图4所示。
采用双参数韦伯尔分布对时域计算结果进行后处理,结果如表4所示。由于TLP在位总体性能分析工况复杂,本文仅列出各项计算结果的极值。

表4 在位总体性能分析结果
通过图4 TLP运动RAO及表4中结果可以看出:(1)平台在垂荡、纵摇和横摇三个自由度存在明显的高频响应,这是张力腿平台区别于其他浮式平台的显著特征;(2)最大水平位移、最大垂向位移、张力筋腱底部/顶部最大转角均在千年一遇环境条件完整工况下出现;(3)百年一遇环境条件,气隙满足要求,千年一遇环境条件局部出现负值气隙;(4)对于张力筋腱最大张力,百年一遇环境条件,在有压载补偿的情况下移除一根张力筋腱为危险工况。

图4 TLP运动RAOFig.4 TLP motion RAOs
4 结 语
本文TLP在位总体性能分析完整地计算了TLP主尺度设计关心的设计数据,计算结果表明表3中TLP主尺度方案能够满足南海环境条件要求。高频波浪载荷对船体和张力筋腱的强度和疲劳设计有较大影响,在设计时应重点关注。在工程实践中,生存工况允许一定程度的负值气隙,对下甲板进行局部加强可能是比较实际的做法。由于数值计算不能准确模拟TLP设计过程中波浪爬升等非线性因素,本文计算结果需经模型试验修正。
[1] 董艳秋. 深海采油平台波浪载荷及响应[M].天津:天津大学出版社,2005.
[2] American Petroleum Institute. API-RP-2T. Planning, designing, and constructing tension leg platforms[S]. 2010.
[3] Det Norske Veritas. WADAM User Manual[M].Høvik: Det Norske Vertitas, 2014.
[4] SIMO Project Team. SIMO-Theory Manual Version4.6 rev0[M]. Trondheim: Norwegian Marine Technology Research Institute, 2015.
[5] 刘应中, 缪国平. 船舶在波浪上的运动[M]. 上海:上海交通大学出版社,1987.
[6] Faltinsen O.M. 船舶与海洋工程环境载荷[M].杨建民,肖龙飞 译.上海:上海交通大学出版社,2008.
[7] 戴遗山. 舰船在波浪中运动的频域与时域势流理论[M]. 北京:国防工业出版社,1998.
[8] 余建星, 张中华,于皓. 张力腿平台总体响应分析方法研究[J]. 海洋通报,2008, 27(2):97.
[9] 任顺利, 陈建民,梁艳霞. 张力腿刚度对平台运动响应影响分析[J]. 石油矿场机械, 2008,37(5):28.
[10] “典型深水平台概念设计研究”课题组. 张力腿平台水动力响应分析[J].中国造船,2005, 46(增刊):477.
[11] 国家863计划“典型深水平台概念设计研究”课题组. 张力腿平台结构总体强度分析研究[J]. 中国造船,2005,46(增刊):470.
In-PlaceGlobalPerformanceNumericalAnalysisforTLPatSouthChinaSea
ZHANG Fa-fu1, GAO Jing-kun2, YANG Xiao-long1, CAI Yuan-lang1
(1.Offshore Oil Engineering Co., Ltd., Tianjin 300451, China; 2. CNOOC China Ltd. Shenzhen, Shenzhen, Guangdong 518067, China)
The load case category and numerical calculation procedure of tension leg platform (TLP) in-place global performance analysis are systematically stated. Meanwhile, the frequency domain method and time domain method are simply introduced. According to a TLP front end engineering design project at South China Sea, modeling principles related to panel meshing, calculation methods of TLP mass properties, stiffness introduced by tendons and risers, and TLP external damping are introduced. At last, the main results of in-place global performance analysis are listed. The procedure and methods used could be a reference for other analogous projects at South China Sea.
tension leg platform; in-place global performance; South China Sea; numerical calculation; front end engineering design
2016-04-03
工信部科研课题“500米水深油田生产装备TLP自主研发”
张法富(1984—),男,工程师,主要从事浮式结构物总体性能、动力定位等设计研究工作。
U674.38+1
A
2095-7297(2016)02-0105-06
