模糊算法在挖掘机动臂液压系统中的应用
2016-01-08李发喜,邓子龙,邓文娟
模糊算法在挖掘机动臂液压系统中的应用
李发喜,邓子龙,邓文娟
(辽宁石油化工大学机械工程学院,辽宁 抚顺 113001)
Application of Fuzzy Algorithm in the Excavator Boom Hydraulic System
LI Faxi,DENG Zilong,DENG Wenjuan
(School of Mechanical Engineering,Liaoning Shihua University,Fushun 113001,China)
摘要:通过对某小型挖掘机液压系统的改造,建立挖掘机动臂液压系统各元件的的数学模型,得出该闭环控制系统的传递函数;运用Matlab/Simulink设计出模糊控制器,并对系统进行了仿真分析。仿真结果表明,采用模糊控制策略较好地改善了液压挖掘机动臂系统的性能,取得了良好的效果,为系统的响应速度和稳定性提供了理论依据。
关键词:挖掘机动臂;模糊控制;液压系统;仿真
中图分类号:TH137.9
文献标识码:A
文章编号:1001-2257(2015)04-0069-03
收稿日期:2014-12-23
作者简介:李发喜(1989-),男,甘肃张掖人,硕士研究生,研究方向为机电液一体化;邓子龙(1967-),男,辽宁葫芦岛人,硕士,教授,研究方向为机械现代设计理论与方法,机电液一体化。
Abstract:Through the improvement of small excavator hydraulic system,we established the mathematical model of excavator boom system,and concluded the transfer function of the closed-loop control system;We designed a fuzzy controller and simulated the system in Matlab/Simulink software. The simulation result show that the fuzzy control strategy improves the performance of excavator boom hydraulic system and obtains good effect,which offer references for the response speed and stability of the system.
Key words:excavator boom;fuzzy control;hydraulic system;simulation
0引言
液压挖掘机是一种应用广泛的工程机械,在矿山、水利、电力及建筑业等领域占有及其重要的作用。为了改善挖掘机的工作性能、提高工作效率、减少循环周期、营造良好的工作环境以及减轻操作者的劳动强度,实现液压挖掘机的自动化、智能化、现代化已经成为当前和未来的发展趋势。针对挖掘机液压系统的高度非线性、时滞性等特点,运用模糊算法对其控制,由于模糊控制具有鲁棒性强和较强的容错能力,因此,适用于解决挖掘机液压系统中的非线性、强耦合性和滞后等问题。
1动臂系统各元件数学模型的建立
随着电液比例控制技术的广泛应用,根据挖掘机动臂液压系统性能的要求,选用电液比例阀组成的闭环控制系统,来实现动臂液压缸活塞杆准确、快速、稳定地达到给定位置。该小型液压挖掘机动臂系统主要由模糊控制器、比例放大器、电液比例阀、液压缸、动臂机构和角度传感器等环节组成,如图1所示。

图1 液压挖掘机动臂控制系统结构
1.1电液比例阀及比例放大器的传递函数
系统采用型号为4WRE6E8-10B/24Z4/M的电液比例阀。一般控制系统的固有频率都比较高,故对比例阀采用二阶环节,其传递函数为:
(1)
KP为比例阀的流量增益;βv为比例阀的阻尼比;wv为比例阀的相频宽,wv=2πf。选用VT-5005型电液比例放大器,与电液比例阀相匹配。比例放大器的输入信号为电压信号,输出信号为比例阀电磁铁的线圈电流。由于电液比例阀的机械-电转换装置的频宽,远远小于该比例放大器的频宽,则比例放大器的传递函数为:
(2)
1.2液压缸的传递函数
根据液压缸力平衡方程和电液比例阀流量方程,将执行元件液压缸视为一个积分环节与二阶环节的组合,可知传递函数为:
(3)
kq为滑阀流量增益;wn为液压缸固有频率;βe为液体的容积模数;Vt为比例阀到液压缸两容腔的总容积;A为液压缸有效面积;m为活塞及负载质量;ξh为阻尼比;Kce为流量压力系数。
1.3反馈环节及动臂机构传递函数
控制系统中,利用角度传感器把关于动臂液压缸角度的输入信号转换成系统电压信号输出。将反馈环节看成比例环节,由于该控制系统的频宽比角度传感器的频宽低很多,比例系数即为反馈环节的放大系数,故控制系统中角度传感器的传递函数为:
H(s)=1
根据动臂液压缸活塞杆的行程与动臂在竖直方向上相对于转台的旋转角范围,可知动臂机构的传递函数为:
(4)
2模糊控制器的设计
2.1模糊控制器原理
在液压挖掘机动臂控制系统中,选用二维控制器结构设计模糊控制器,该结构反映控制过程中的动态响应特性,具有结构简单、原理清晰的特点。以液压挖掘机动臂系统的关节角偏差e和关节角偏差变化速度ec作为模糊控制器的输入量,把e和ec模糊化后得到模糊子集E和EC,通过模糊控制规则进行模糊决策,输出动臂液压缸的电控变量U,最后经过解模糊输出动臂液压缸实际电控变量。模糊控制原理如图2所示。

图2 模糊控制原理
2.2隶属函数的建立
液压挖掘机动臂控制系统的输入信号为r,输出信号为y,动臂系统的关节角偏差和偏差变化分别为e和ec,动臂机构的输入为u,模糊控制器与e,ec对应的输入为E,EC,与u对应的输入为U。E,EC,U的论域取{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其模糊子集均为{NL,NM,NS,ZE,PS,PM,PL}。E的模糊子集反映出偏差E的变化情况,EC的模糊子集反映出偏差变化速度的快慢,U的模糊子集反映动臂液压缸电控变量的大小[6-7]。在模糊逻辑窗口中,分别建立E,EC,U的隶属度函数,选用三角形隶属度函数,如图3所示。

图3 E, EC, U的隶属度函数
2.3模糊控制规则及决策方法
系统采用“If A and B then C”的模糊语句来描述模糊控制器的模糊规则,根据输入量偏差和偏差变化的不同,选取合适的控制变量,共有49条模糊语句。模糊控制规则如表1所示。
表1模糊控制规则表

ECENLNMNSZEPSPMPLNLNLNLNMNMNSZEZENMNLNLNMNMNSZEZENSNLNLNMNSZEPMPMZENLNLNSZEPSPLPLPSNMNMZEPSPMPLPLPMZEZEPSPMPMPLPLPLZEZEPSPMPMPLPL
液压挖掘机动臂系统模糊控制器运用Mamdani模糊推理方法,解模糊采用重心法(centroid),可得模糊控制器的输入输出响应图,如图4所示。

图4 模糊控制器输出曲面
3基于Simulink的仿真与分析
利用Matlab仿真软件中的Simulink对液压挖掘机动臂系统进行仿真。仿真框图如图5所示,其中比例放大器、比例阀、动臂液压缸和动臂机构的传递函数由式(1)~式(4)计算。

图5 动臂系统模糊控制仿真框图
通过调整液压挖掘机动臂系统的模糊控制器参数,使得Ke=1,Kec=0.01,Ku=1.2及积分因子KI=0.02,动臂控制系统输入信号设定为阶跃信号,幅值为1。液压挖掘机动臂系统无控制器和采用模糊控制器的仿真曲线如图6和图7所示。
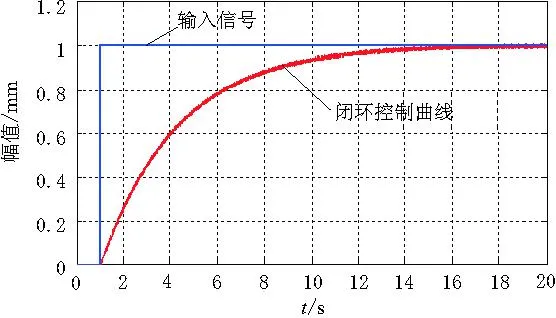
图6 无控制器的仿真曲线
图6为动臂控制系统的单位阶跃响应,其幅值随时间的变化,该闭环控制系统在无控制器时,系统存在轻微振荡,在15 s时达到了稳定状态。由图7可知,模糊控制具有较好的动态响应过程,无明显振荡,在7 s时达到了稳定状态,同时,系统的超调量减小,反应时间加快,控制效果良好。因此,应用模糊控制器组成的液压挖掘机闭环控制系统,较好地改善了系统的快速响应能力和稳定性。

图7 模糊控制仿真曲线
4结束语
通过建立挖掘机动臂液压系统各元件的数学模型,从控制的角度出发,结合模糊算法的优点,设计了液压挖掘机动臂系统的模糊控制器。仿真结果表明,采用模糊控制策略改善了液压挖掘机动臂系统的性能,具有较好的稳定性和鲁棒性。
参考文献:
[1]张海涛.液压挖掘机器人工作装置运动控制系统的研究.长沙:中南大学,2004.
[2]贺继林,冯雨萌,杨敏,等.液压挖掘机工作装置电液比例控制模型的建立与研究.现代制造工程,2010(3):111-114.
[3]许益民.电液比例控制系统分析与设计.北京:机械工业出版社,2005.
[4]朱建新,杨翔,梅勇兵,等.一种新型电液比例阀的模糊控制研究.机械科学与技术,2008,27(12):1651-1655.
[5]郭再泉,黄麟,黄堃.基于专家系统模糊PID控制的液压挖掘机节能控制研究.液压与气动,2012(11):54-57.
[6]Hassan M Y,Kothapalli G.Interval type-2 fuzzy position control of electro-hydraulic actuated robotic excavator. International Journal of Mining Science and Technology,2012,22(3):437-445.
[7]刘杰,林剑峰,马晓波,等.挖掘机器人模糊鲁棒控制的研究.东北大学学报:自然科学版,2010,31(9):1333-1336.
[8]王三秀,曾平林.基于模糊滑模的机器人控制算法仿真.机床与液压,2013,41(11):167-169.
