基于线性判别分析的表面肌电信号动作模式识别
2016-01-08镡建军
基于线性判别分析的表面肌电信号动作模式识别
镡建军
(山西省原平市垃圾处理中心,山西 原平 034100)
摘要:表面肌电信号(SEMG)属于非平稳的生物电信号,特点是信号微弱、易受干扰.为了有效提取表面肌电信号(SEMG)特征、更好地识别人体上肢运动的模式,针对表面肌电信号的特点提出了一种线性判别分析人体前臂运动特征的识别方法.通过虚拟仪器同时采集桡侧腕屈肌和肱桡肌两路的表面肌电信号,取平均绝对值(MAV)和均方根(RMS)为特征参数,应用线性判别分析(LDA)方法对样本特征矩阵进行模式识别.与其他特征识别方式的对比实验表明,此方法的动作识别率更高,能够成功地从表面肌电信号中识别握拳、展拳、手腕内翻和手腕外翻4种动作,动作的平均识别率达到了99.5%.
关键词:表面肌电信号;线性判别分析;模式识别;特征提取
中图分类号:TP391.4文献标志码:A
收稿日期:2015-03-29
作者简介:镡建军(1973-),男,山西原平人,助理工程師,主要从事数据采集与处理方面的研究.
表面肌电信号(SEMG)是通过电极从人体骨骼肌表面记录下来的神经肌活动发放的生物电信号[1],应用已经深入到临床医学、运动控制、生物医学与康复工程等诸多领域[2].在肌电控制中,最关键的是如何有效地提取SEMG特征进而有效识别肢体动作[3].Mahdi等[4]采用一种自适应神经模糊推理系统识别手部动作命令,动作识别率达到92%;罗志增等[5]采用小波包变换和学习向量量化对手部握拳、展拳、伸腕和屈腕这4种动作进行识别,识别正确率为96%;宋爱国等[6]采用四通道采集SEMG信号,利用小波变换和BP神经网络来识别SEMG信号8种动作,动作平均识别率为96.25%.但是,在SEMG信号的特征提取和动作模式识别中仍然存在特征向量维数过高、数据冗余度大、分类器复杂、鲁棒性差和识别率低等问题.为此,提出了一种线性判别分析法(Linear Discriminant Analysis,LDA)对表面肌电信号进行运动特征识别.在肌电信号模式识别中,LDA分类器的准确率不输于前面提到的那些复杂的判别方法,而且还具有易于实现、训练更迅速等优点[7].
1SEMG样本采集和特征表示
1.1 SEMG样本采集
SEMG信号采集系统主要由SEMG检测电极、SEMG信号调理电路、DAQ板卡和LabVIEW框架下的计算机系统组成[8-10].
在实验室条件下,用仪表放大器AD8222和运算放大器OPA4347设计了一套高输入阻抗、高共模抑制比的差分输入SEMG信号采集与调理电路,调理电路的放大倍数为250倍,通频带为10~1 000 Hz.用Ag/AgCl贴片电极作为SEMG传感器,将差分式电极分布于桡侧腕屈肌和肱桡肌上,参考电极贴到桡腕关节处.受试者做握拳、展拳、手腕内翻和手腕外翻4种动作.采样频率为2 000 Hz,采样时间5 s,采集到的SEMG信号如图1所示.

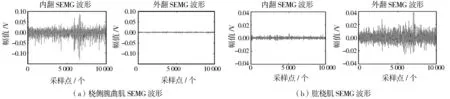
图1 采集到的两路SEMG波形 Fig.1 Collected two channel SEMG waveforms
1.2SEMG信号的特征提取
对于连续的SEMG信号分类,与频域特征和时-频特征相比,时域特征能够获得相对较好的分类特性,具有计算简单、获取迅速等优点.对时域信号数据进行数学运算和统计可以得到SEMG特征,主要有平均绝对值和均方根.
平均绝对值(Mean Absolute Value,MAV)是SEMG信号时域分析中的典型特征参数,可以通过SEMG信号的平均绝对值来设定阈值,进而判断肌肉是否动作.平均绝对值定义式如下:

(1)
式中,I为样本数据段数,xkj为第j段第k个样本数据,Nj为该段的样本数,这里选取Nj=100.
均方根(Root Mean Square,RMS)可以用来衡量SEMG信号的大小,定义式如下:

(2)
式中,I为样本数据段数,xkj为第j段第k个样本数据,Nj为该段的样本数,这里选取Nj=100.
2SEMG动作模式识别算法
线性判别分析(LDA)也被称为Fisher线性判别(Fisher Linear Discriminant,FLD),是模式识别中的经典算法[11].线性判别分析的基本思想是将高维的模式样本投影到最佳鉴别矢量空间,以达到抽取分类信息和压缩特征空间维数的效果.SEMG运动模式特征样本集合Φ为{Y1,Y2,…,YI}, Yj==[Y1,j, Y2,j, …, YM,j]T,j=1,2,…,I,其中I为样本数据分段数,M为样本特征个数.定义动作类别w1和w2,集合Φ中w1类有I1个特征采样点数,w2类有I2个特征采样点数Φ1,属于w2类的样本记为子集Φ2,SEMG信号数据中两种动作类别的具体方法如下:
(1)计算SEMG信号动作模式特征样本中各动作类别的样本均值向量mi(Ii是wi类的样品个数,i=1,2):
(3)
(2)计算SEMG信号中各个动作类别的样本类内离散度矩阵Si和总类内离散度矩阵Sw:

(4)
Sw=S1+S2.
(5)
(3)计算SEMG信号运动模式特征矩阵中各个动作类别的样本类间离散度矩阵Sb:
Sb=(m1-m2)(m1-m2)T.
(6)
(4)求最佳解向量W*.
定义Fisher准则函数
(7)
使得JF(W)取得最大值的W*为
(8)
(5)将SEMG信号数据中训练样本集合内所有样本数据进行投影.按下式得到投影后标量en:
en=(W*)TYn,n=1,2,…,Ii,
(9)
从而得到一维样本集合,设对应集合Φ1和Φ2的两个像子集分别为Θ1和Θ1.
(6)计算在投影空间上的分割阈值e0.
在一维空间R,各类样本均值
(10)
在投影空间上的分割阈值
(11)
(7)对于给定的SEMG信号数据测试样本Y,计算出样本在W*上的投影点
e=(W*)TY.
(12)
(8)根据决策规则分类,有
(13)
用LDA方法来解决SEMG信号中含有多种动作类别的运动特征矩阵的分类问题时,首先实现两种动作的识别与分类,然后根据返回的动作类别再与新的动作类别进行分类,直到所有的动作类别分完为止.
3结果与分析
实验中每种动作模式采集5s的SEMG信号数据,采样频率为2 000Hz,得到4种动作的原始数据共40 000个,每种动作原始数据为10 000个.按照公式(1)和(2)得到两路SEMG信号样本的MAV和RMS特征采样数据,如图2所示.
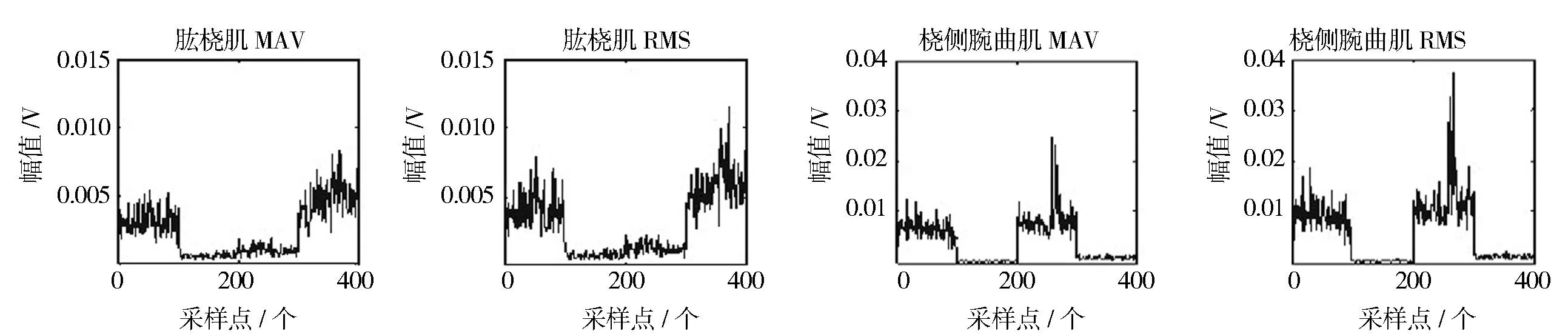
图2 两路SEMG信号的特征数据 Fig.2 Two SEMG signals characteristic data
在图2中,肱桡肌的MAV和RMS数据及桡侧腕曲肌的MAV和RMS数据分别都是400个,其中1~100为握拳数据,101~200为展拳数据,201~300为内翻数据,301~400为外翻数据.将这4个特征向量数据构成4行400列的运动模式矩阵Y=[Y1, Y2, Y3, Y4]TYc=[Yc,1, Yc,2, …, Yc,400],其中c=1,2,3,4.将握拳、展拳、内翻和外翻数据分别划分为前50组训练数据和后50组测试数据,从而得到4行200列的训练特征矩阵和4行200列的测试特征矩阵.将运动模式矩阵的训练特征矩阵和测试特征矩阵输入LDA分类器,得到各个动作类别的分类阈值,如表1所示.

表1 应用LDA法的各动作分类阈值 Tab.1 Actions classification thresholds by LDA
根据表1的分类阈值,得到各个动作的分类结果和正确率,如表2所示.

表2 应用LDA法的动作识别结果 Tab.2 Actions classification results by LDA method
由表2可得,LDA分类器的分类结果中外翻、内翻和展拳的正确识别率均为100%,握拳的正确识别率为98%,总体平均识别率为99.5%.应用LDA法、K近邻法、BP网络和RBF网络分别对特征样本矩阵进行识别分类,识别结果如表3所示.

表3 4种分类方法的分类结果 Tab.3 Four classification results %
从表3可以看出,使用LDA分类器的动作平均识别率达到99.5%,而使用K近邻分类器的动作平均识别率为88%,使用BP神经网络的动作平均识别率为92%,使用RBF神经网络的动作平均识别率为95%.从这4种方法的分类结果可以看出,应用线性判别分析法对特征矩阵进行分类,动作识别率最高.
4结束语
针对SEMG信号的非平稳性和微弱性,应用虚拟仪器采集SEMG信号并计算其平均绝对值和均方根两个特征参数,采用LDA方法对实验采集的两通道SEMG信号进行了握拳、展拳、手腕内翻和手腕外翻4个动作模式的识别.由实验结果可得,LDA方法的动作平均识别率为99.5%,与K近邻分类算法、BP神经网络和RBF神经网络相比具有识别率高、运算速度快和鲁棒性能好等特点.
参考文献:
[1]Fukuda O,Tsuji T.A human-assisting manipulator teleoperated by EMG signal and arm motion[J].IEEE Transactions on Robotics and Automation,2003,19(2):210-222.
[2]Zhao Z Y,Chen X,Zhan G X,et a1.Study on online gesture SEMG recognition[C]∥Lecture Notes in Computer Science,Kolkata:[s.n.],2007:1257-1265.
[3]Shinichi A,Akinori S,Hiroshi H,et a1.Driving electric car by using EMG interface[C]∥IEEE International Conferences on Cybernetics Intelligent Systems,Bangkok:[s.n.],2006:1-5.
[4]Mahdi K,Mehran J.A Neuro-Fuzzy inference system for SEMG-based identification of hand motion commands[J].IEEE Transactions on Industrial Electronics,2011,58(5):1952-1960.
[5]罗志增,熊静,刘志宏.一种基于WPT和LVQ神经网络的手部动作识别方法[J].模式识别与人工智能,2010,23(5):695-700.
[6]侯秀丽,宋爱国.基于小波变换与BP网络的四通道表面肌电信号模式识别[J].仪器仪表学报,2007,28(4):528-531.
[7]Hargrove L J,Englehart K,Hudgins B.A comparison of surface and intramuseular myoelectric signal classification [J].IEEE Transactions on Biomedical Engineering,2007,54(5):847-853.
[8]姚良标,楼蔚松,罗志增.肌电信号处理和肌电控制的研究[J].杭州电子工业学院学报,2004(6):82-84.
[9]胡巍,赵章琰,路知远,等.无线多通道表面肌电信号采集系统设计[J].电子测量与仪器学报,2009,23(11):30-35.
[10]万莎,侯文生,杨丹丹,等.基于LabVIEW的多通道SEMG信号检测系统设计[J].测控技术与仪器仪表,2012,38(3):78-81.
[11]庄哲民,张阿妞,李芬兰.基于优化的LDA算法人脸识别研究[J].电子与信息学报,2007,29(9):2047-2049.
SEMG feature recognition based on linear discriminant analysis
CHAN Jianjun
(TheCenterforGarbageDisposal,Yuanping034100,China)
Abstract:Surface electromyogram (SEMG)signal belongs to non-stationary biological signal,which is so weak and susceptible to interference. Through the acquisition of two channels of SEMG on flexor carpi radialis and brachioradialis with virtual instrument, the mean absolute value (MAV) and root mean square (RMS) can be taken as feature parameters, and the linear discriminant analysis (LDA)method is appled to pattern recognition of the collected samples. The experiments comparing with other identification methods show that, the proposed recognition method in this paper can successfully identify four kinds of motions such as hand grasping, hand opening, radial flexion and ulnar flexion, and the recognition accuracy is much higher.
Key words:surface electromyogram(SEMG); linear discriminant analysis(LDA); pattern identification; feature extraction

