仿真技术在航道工程设计评价中应用研究*
2016-01-08王先登
王先登
(长江武汉航道局 武汉 430010)
仿真技术在航道工程设计评价中应用研究*
王先登
(长江武汉航道局武汉430010)
摘要:仿真技术是航道工程设计评价有效手段之一,文中总结目前航道仿真评价过程,以及系统构成与特性,分析了航道仿真系统中船舶运动建模、船舶交通流建模、航道场景建模、实验评价方法等关键技术,并展望了在内河航道仿真系统设计应用中需要解决的问题.
关键词:航道;助航设施;虚拟现实;地理信息系统
王先登(1957- ):男,高级工程师,主要研究领域为航道信息化
0引言
仿真是利用模型重现现实系统中发生的本质过程,并通过对系统模型的实验评估现实的或设计中系统的效能与运营风险.仿真技术通过精确的模型与高逼真度的航道交通场景,有效地评估航道及助航装备运营前的效能并发现潜在的风险,从而改进航道交通安全性,提高通过能力.荷兰航海研究所开发了港区船舶操纵实时仿真模型与软件,成功应用在鹿特丹港航道的设计.KadirSariöz等[1]提出一种实时的船舶操纵模拟系统用于模拟船舶通过Istanbul海峡水域时,外界环境如航道条件、水流、气象条件对船舶航态的影响.K.Benedict等[2]针对桥区水域船舶驾驶行为,建立船舶操纵模型,分析船舶通过桥区水域的安全性.德国的杜伊斯堡大学船舶运输研究中心开发了浅水船舶驾驶模拟系统用于评估内河航道设计以及培训内河船舶驾驶员.比利时列日大学研制了内河航运模拟系统,用于评估船闸,以及受限水域的助航设施设计.在国内,陈沈阳等[3]开展了港口航道船舶交通流模拟研究,通过对港口船舶交通流建模与实时仿真规划港口内的船舶航路.钱忠华[4]探讨了运用船舶操纵模拟器进行港航设计论证的方法.孔宪卫等[5]研究了船舶模拟器在引江济汉通航工程与长江交汇口布置中的应用.本文将总结目前航道仿真的技术及系统构成特点,发展现状,分析其关键技术并展望在内河航道系统中应用的发展.
1航道工程设计评价仿真过程概述
航道工程设计仿真过程包括建立仿真规划和进行仿真实验2个主要步骤.仿真规划包括确定仿真过程目标界定各种输入参数,规划仿真具体实施方案,提出仿真软件系统功能要求.仿真实验则是实施仿真实验,并分析实验结果.
1.1航道工程设计评价仿真目标与条件
在进行航道工程设计评价仿真前,需要结合风险评估进行初步分析,为仿真分析提供一些基本的输入参数,从而确保仿真结果的准确性.通常在分析阶段应包括:(1)明确助航系统设计的目的;(2)明确设计的地理范围以及助航设施的地点、观察时间以及投资等约束;(3)明确航道通航的基本要素,如船舶类型、航路、船舶密度、水文气象条件、船船交互作用以及最低能见度等;(4)明确航道设计中的一些标志,如界标、危险标志、指引标志、助航标志的类型等.
1.2航道工程设计评价仿真实施方案规划
航道工程设计评价仿真实施方案规划主要是确定仿真研究内容、参与实验的人员以及仿真系统软件与设备等.航道与助航设施设计评价仿真实施内容,包括:(1)评估助航设施设计参数如安放形式、位置、类型、特性以及数量等;(2)评估航道与港口的布局等对船舶安全与效率的影响;(3)评估通航环境如风、浪、流、岸壁效应,能见度以及背景光等对船舶安全的作用.仿真软件是系统仿真实验的核心支撑.实施航道与助航设施设计评价仿真实验时,其软件应具有如下功能:(1)在设计航道与助航设施前用户可以浏览,用户可以浏览相关航道的空间位置;(2)可以进行助航系统不同设计方案的绩效分析;(3)可以提供高质量的航道地形以及港口信息数据源;(4)可以评估助航设施视觉特效与光污染等;(5)可以评估雷达图像;(6)可以有效地评估各种助航设施功效,如信号灯、航标、信标、AIS(船舶识别系统),以及VTS(船舶交通管理系统);(7)可以评估各类船舶的操纵特性;(8)可以评估船舶速度特别是高速船舶对助航设施的要求;(9)可以模拟白天、黑天各种能见度效果;(10)可以模拟各种水文条件;(11)可以从不同视角观察船舶与助航设施;(12)可以叠加各种交通信息数据如雷达和AIS;(13)与船舶电子导航系统具有借口;(14)允许模拟多艘船舶并显示其交互作用;(15)可以模拟各种拖轮的操纵行为;(16)可以评价各种船舶定位系统的准确性与性能.
1.3航道工程设计评价仿真分析要求
在进行仿真实验后,需要对评估结果进行深入分析,形成评估文件.评估文件应包括如下内容:(1)仿真评价目标;(2)仿真评价的方法;(3)仿真系统船舶的描述及其建模;(4)仿真系统中航道与助航设施以及通航条件的描述;(5)通航环境动态与深度信息建模;(6)仿真系统的组成;(7)实验过程的记录;(8)实验数据分析;(9)实验结论及建议,如船舶大小、船舶运动状态对助航设施功效的影响、通航环境约束、能见度条件、限制水域船舶航行条件、助航实施的布设、航道的尺度等等.此外也包含如拖轮的使用条件、引航技术要求,以及培训等建议.
2航道仿真系统及特点
2.1基于船舶驾驶模拟器的航道仿真系统
基于船舶驾驶模拟技术构建航道仿真系统是当前进行和岛屿助航设施设计评价仿真的主要技术手段,典型的航道仿真系统有:快速实时仿真系统、桌面仿真系统、部分任务模拟器、全任务模拟器,其特点与适用范围见表1.
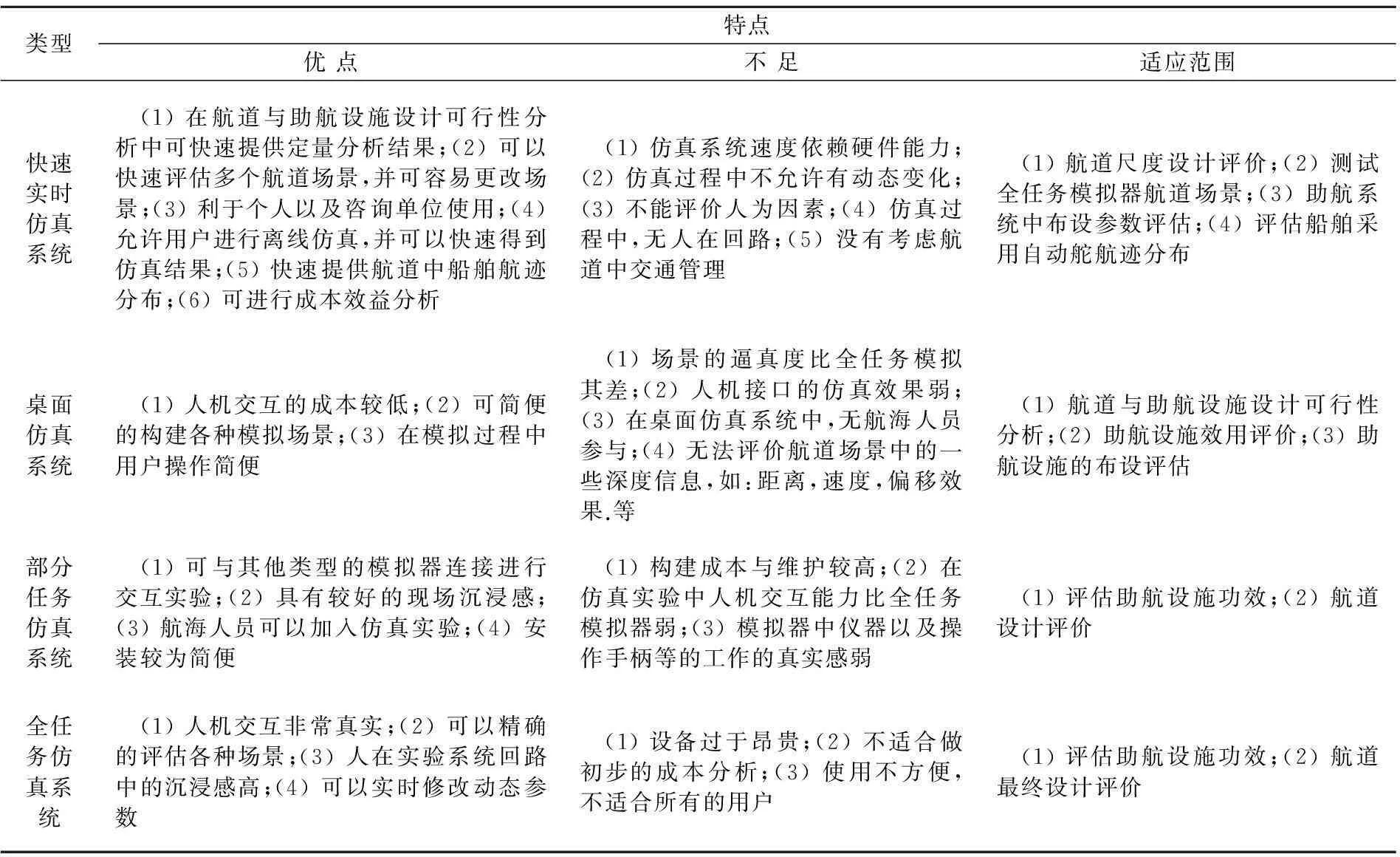
表1 航道仿真系统特点与适用性
2.2船舶交通流仿真
船舶交通流仿真是指对船舶在航道中微观运动进行模拟,不需要精确船舶力学模型,以及场景模型.通常船舶交通流仿真技术采用船舶智能体技术按照定义好的路线、船舶特性以及船舶大小、船舶速度等在设定的航道上遵守交通规则以及避碰规则航道约束条件等自动航行,目的识别船舶拥堵、碰撞以及搁浅的风险.交通流仿真模型可以对交通事件进行仿真分析,但是缺乏对船舶的物理特征的描述.利用船舶交通流仿真模型结合船舶的AIS数据记录可以有效地评估助航设施的布设,进而提出可行的修改方案.
3航道仿真关键技术与评价方法
3.1船舶运动建模
在航道仿真系统中,船舶运动数学模型决定船舶运动的状态,其精度直接影响着船舶操纵模拟仿真的逼真度.正确建立船舶运动数学模型是航道仿真评价的关键技术之一.导致船舶运动的各种力既受操纵人员也受环境控制.环境方面的力可由风、流、岸壁效应、浅水、船间作用和波浪等因素产生.操纵方面的力是对舵、车、拖船、侧推器、缆绳、锚等的操作所施加的.这些力导致船舶产生6个自由度的运动:3个水平方向上的运动(行驶、横移和回转)以及3个垂直方向上的运动(垂荡、横摇和纵摇).目前许多船舶驾驶模拟器只实现3个水平方向上的运动,其数学模型为
(1)
(2)
(3)
式中:m为船舶质量;IZ为轴惯性矩;u 为前后方向运动速度;v 为横向偏移运动速度;r 为船首转动速率;X 为纵向力总和;Y 为横向力总和;N 为绕垂直轴的力矩总和;XG为中心在轴上的位置.为了计算,必须确定各种各样的系数.由于涉及的参数相当多,确定这些参数的值牵涉到复杂的约束模型试验和实船测试,以及理论推导,具体可参考文献[6].
3.2船舶交通流建模
船舶交通系统是人船环境构成的一个复杂系统,其变化规律很难用确定解析或者经验公式来描述,应用仿真技术进行定量和定性研究与分析已经成为经济有效的工具,可为掌握其变化规律、方案论证和系统优化提供科学依据.因此,通过对航道交通流建模与仿真研究,确定航道的不安全因素,评估航道的通过能力,从而保障航道安全高效.一个典型船舶交通仿真模型总体流程如图1所示.船舶交通流仿真涉及的模型主要有船舶运动模型,减速模型,会遇模型、避碰模型、交叉会遇模型.

图1 航道船舶交通流模拟流程
3.3航道仿真场景建模
在航道仿真模拟系统中,模拟器场景包括:建筑物、船舶、船首图像、港口、航道等,可提供白天、黄昏、夜间等不同能见度以及海量等视景,也可绘制逼真的水面、天空、陆地等景物,模拟船舶运动以及拖轮等操作.因此如何建立3维的航道场景模型对于构建航道仿真系统非常重要.目前计算机3维场景建模方法有:网格化高度场建模、细节层次法建模、体素法建模.网格化高度场建模方法是传统的地形建模方法.假设地形是一个有两个变量的函数,即在每一坐标表示的点上,都有一个值来表示该点的高度.考虑所有可能的情况用网格化的高度场分布来获得三维信息.它按照网格的形式来表示地形,将每一个坐标点的高度值列成一个网格,成为高度场.采样出来的点是一个用来对表面进行逼近的多边形网格.在预采样上,考虑到存储的难易问题,具体可以采用等边的双三次面片和正方形矩阵两种方法.正方形矩阵方法更为简便,在有些船舶操纵模拟器视景数据生成中应用.细节层次模型方法(levelofdetail,LOD)是为每个物体建立多个相似的模型,不同模型对物体的细节描述不同,对物体细节的描述越精确,模型就越复杂.LOD模型是一种新的模型表示方法,改变了传统的“图像质量越精细越好”的片面观点,而是依据视线的主方向、视线在景物表面的停留时间、景物离视点的远近和景物在画面上投影区域的大小等因素来决定景物应选择的细节层次,以达到实时显示图形的目的.另外,通过对场景中每个图形对象的重要性进行分析,使得最重要的图形对象进行较高质量的绘制,而不重要的图形对象则采用较低质量的绘制,在保证实时图形显示的前提下,最大程度地提高视觉效果.在数据模型自动生成方面,基于网格重新划分的多边形模型简化方法是常用方法.体素模型表示“体积元素”,与表示“图示元素”的像素比较相似,通过图元所占有的空间来表现物体或物体的集合.其优点是非常简单,几乎直接包含了扫描设备可以提供给我们的一些数据.该建模方法可用两种方法实现,一种是使用一个矩阵,矩阵中的每一个单元都模拟一个小的空间体积.矩阵的入口有一个值来表示这个区域空间的一些属性,如颜色或密度等,可以判断空间体积是否已经被占用,当单元格是空的时,它就表示相应的空间没有被占用.另一种是使用四叉树和八叉树来达到只给那些真正有用的单元分配存储空间的建模方法[7].
3.4仿真实验评估方法
在航道与助航设施设计的仿真评价中主要是对安全性与航道的通过能力进行评价.安全性评价最常用的方法就是综合安全评估(formalsafetyassessment,FSA).依据评估模型建立的一般方法,建立模糊综合评判模型的程序为:评估指标体系的确定;各评估指标权重的确定;各评估指标隶属度的确定;模型建立与应用.其评估顺序见图2.在航道及助航设施设计安全评估中涉及的指标见表2.
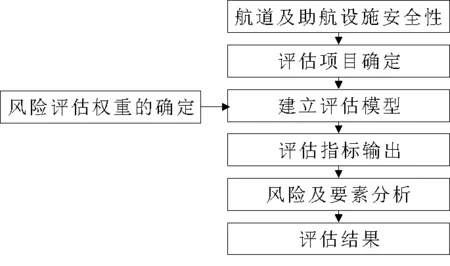
图2 航道船舶安全风险评估模型
航道的通过能力通常利用航道交通容量来表达.交通容量是指一个航道容纳船舶交通的能力,以单位时间内能够通过的最大船舶数表示.假设在不妨碍交通的航道中,船舶性能与条件相同,则基本航道交通容量的表达式为
(4)
式中:Cb为航道基本交通容量;W 为航道宽度;ρmax为单位航道宽度上船舶密度最大值;V为船舶的平均速度.通过仿真实验获得船舶的平均速度以及ρmax即可以得到航道基本的交通容量.

表2 航道及助航设施安全评估指标
4结束语
随着国家对内河航运的重视,航道建设处于大发展时期,而航运的繁荣以及船舶大型化的趋势,对内河航道系统安全与畅通要求越来越高,因此仿真技术在内河航道系统设计有着广泛的需求.尽管仿真技术在港口航道及助航设施设计评价有着较为成熟的应用,但将仿真技术应用在内河航道系统设计评价中仍需解决很多技术与方法问题,开展该领域研究对于促进内河航道工程科学的发展具有重要的意义.
参 考 文 献
[1]SARIöZK,KüKNERA,NARLIE.Areal-timeshipmanoeuvringsimulationstudyforthestraitofIstanbul(Bosporus)[J].JournalofNavigation,1999,52(3):394-410.
[2]BENEDICTK,FISCHERS,GLUCHM,etal.Fasttimesimulationtechnologyforinvestigationofpersonoverboardmanoeuvresforimprovedtrainingandsupportforapplicationonboard[C].InternationalConferenceIMLA,London,2009:71-84.
[3]陈沈阳,邵哲平,方祥麟,等.港口航道交通流仿真模型的研究[J]. 大连海事大学学报,2001,27(1):34-38.
[4]钱华忠.船舶操纵模拟器在港航设计论证上的应用研究[J].中国航海,2003,54(1):20-24.
[5]孔宪卫,李金合,冯小香,等.船舶模拟器在引江济汉通航工程与长江交汇口布置中的应用[J].水道港口,2010,31(4):276-281.
[6]TheSpecialistCommitteeonEssoOsaka.Finalreportandrecommendationstothe23rdITYC[C].Proceedingsof23rdInternationalTowingTankConference,2002:581-617.
[7]马小虎.虚拟现实中多细节层次模型的研究[D],杭州:浙江大学,1997.
中图法分类号:U644.8
doi:10.3963/j.issn.2095-3844.2015.01.049
收稿日期:2014-07-15
AStudyofSimulationToolsforWaterwayDesigningAssessment
WANGXiandeng
(Changjiang Wuhan Waterway Bureau, Wuhan 430010,China)
Abstract:Simulation is one of effective tools for assessment of waterway designing. The system constitution and procedure of waterway simulation are introduced, and key technologies of waterway simulation system are analyzed, including vessel dynamics modeling, vessel traffic flow modeling, waterway scenery modeling, assessment methods, and so on. Finally, how to design the simulation system of inland waterway is prospected.
Key words:waterway; aids-to-navigation; virtual reality; geographic information systems
*西部交通科技建设项目资助(批准号:201364548200)